 |
Главная |


Особенности управляемых систем
|
из
5.00
|
Одна из характерных особенностей управляемой кибернетической системы - способность изменять свое движение, переходить в разные состояния под влиянием различных управляющих воздействий. Всегда существует некоторое множество движений, из которых производится выбор предпочтительного движения. Где нет выбора, там нет и не может быть управления.
Таким образом, управляемые системы рассматриваются не в статическом состоянии, а в движении и развитии, что коренным образом изменяет подход к их изучению и в ряде случаев позволяет вскрыть закономерности, установить факты, которые иначе оказались бы не выявленными. Устойчивость как функциональное свойство управляемых систем, имеющее решающее значение для оценки работоспособности систем, было бы невозможным без уяснения динамики происходящих в них процессов.
Как уже отмечалось, управляемая система постоянно находится в движении, ей присущ динамический характер. Термин "движение" хорошо известен из механики, где он означает изменение положения какого-либо объекта в пространстве с течением времени. В кибернетике движение имеет более общий смысл, а именно: всякое изменение объекта во времени. Движением называется, например, изменение температуры тела, заряда конденсатора, объёма или давления газа, суммы текущего счёта в банке, запасов сырья на складе, наконец, жизнь и мышление.
Все объекты, явления и процессы в природе взаимосвязаны и влияют друг на друга, поэтому, выделяя какой-либо объект, необходимо учесть влияние среды на объект и объекта на среду. Следовательно, изучение поведения любой управляемой системы производится с учетом ее связей со средой.
В управляемых системах всегда присутствует орган, осуществляющий функции управления. В этом случае систему можно схематически представить в виде совокупности управляющей и управляемой частей (смотри рис.4.2). На рисунке стрелками указаны направления воздействий, которыми обмениваются части системы.
|

Заметим, что указанные простейшие управляемые системы никогда не являются изолированными. Они взаимодействуют с внешней средой, друг с другом, могут составлять более сложные системы, входящие в качестве элементов в управляемые и управляющие части сложных систем и образующие иерархию управляемых систем. Принцип иерархичности управления - это принцип многоступенчатого построения управляющих систем, при котором функции управления распределяются между соподчинёнными частями системы. Управляющие сигналы устройств старшего ранга носят обобщённый характер и конкретизируются в подчинённых устройствах.
Движение системы, изменение её состояния могут происходить под влиянием как внешних воздействий, так и в результате процессов, происходящих внутри системы. На каждую систему, строго говоря, оказывает влияние бесчисленное множество внешних воздействий, но далеко не все они существенны. Из множества воздействий отбирают лишь те, которые в условиях решаемой задачи существенно влияют на состояние системы. Эти внешние воздействия называют входными величинами (входными воздействиями, входными переменными системы), а элементы системы, к которым приложены входные воздействия - входами системы.
Так, на движение самолета существенно влияют следующие факторы: сила и направление ветра, плотность атмосферы, положение рулей, тяговые усилия двигателей. Все они рассматриваются как входные воздействия на самолет.
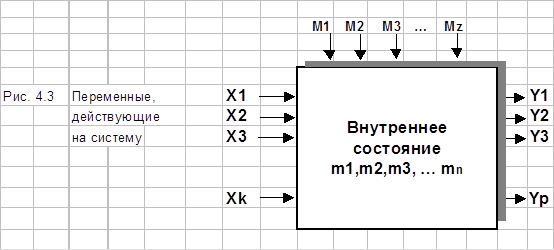
Для решения задач управления выделяют два типа входных величин: управляющие воздействия X и возмущающие воздействия M (рис.4.3). К управляющим относятся такие величины, значениями которых можно распоряжаться при управлении системой и которые можно изменять с целью осуществления движения, предпочтительного по сравнению с другими возможными движениями управляемой системы. В приведенном примере управляющими воздействиями являются воздействия, создаваемые рулевыми плоскостями, и тяговые усилия двигателей, которые пилот изменяет по своему усмотрению. Возмущающие воздействия - влияние ветра и плотности атмосферы на движение самолета.
Воздействие системы на окружающую среду характеризуется значениями ее выходных величин Y (см. рис. 4.3). Совокупность выходных величин и их изменения определяют поведение системы, позволяют руководителю оценивать соответствие движения системы целям управления. При управлении движением самолета выходными величинами служат курс и скорость движения, поскольку значения этих величин характеризуют цель управления, которая состоит в том, чтобы обеспечить прибытие самолета в заданное место и время.
Изменение входных величин, как правило, вызывает изменение выходных величин. При этом изменения последних не всегда проявляются сразу: они могут запаздывать, но никогда не опережают изменения входных величин, которые - следствие, а входные - причина движения системы.
Возмущающие воздействия, влияющие на движение системы, могут иметь не только внешнее, но и внутреннее происхождение, например, изменение свойств элементов системы после длительной работы или в результате нарушения нормального функционирования элементов системы.
Состояние любой системы с заданной точностью можно охарактеризовать совокупностью значений величин m, определяющих ее поведение, т.е. переменными состояния систем.
Эти величины позволяют сравнивать состояния отдельных систем и судить об их различии, сравнивать состояния одной и той же системы в произвольные моменты времени для выяснения ее движения. Из всевозможных форм описания состояния системы наибольший интерес представляет способ, основанный на понятии пространства состояний системы. Пространством состояний системы называется многомерное пространство, в котором каждое состояние системы изображается точкой, называемой изображающей точкой (она “изображает” данное состояние системы), координаты которой - переменные состояния системы m1,m2,...,mn.
В реальных системах не все координаты могут изменяться в неограниченных пределах. Большая часть координат принимает значения, лежащие в ограниченном интервале
m'i < mi < m"i,
где m'i и m"i - границы интервала возможных значений координаты mi.
Область пространства состояний, в которой находится изображающая точка, называется областью допустимых состояний. Говоря о пространстве состояний, имеют в виду лишь его допустимую область. Однако даже в ней не всегда любая точка изображает возможное состояние системы. Таким свойством обладает лишь непрерывное пространство состояний, соответствующее системе, координаты которой принимают любые значения (в допустимых пределах). Существуют системы (дискретные), в которых координаты принимают конечное число фиксированных значений. Пространство состояний этих систем также дискретно.
Для характеристики движения системы разделим все переменные на три группы:
* входные переменные, или входные воздействия X и M, представляющие сигналы, генерируемые системами, внешними по отношению к исследуемой системе, и влияющие на ее поведение;
* выходные переменные или переменные, характеризующие реакцию системы Y, и позволяющие описать некоторые аспекты поведения системы, представляющие интерес для исследователя;
* переменные (координаты) состояния m, характеризующие динамическое поведение исследуемой системы.
|

Учитывая относительность понятия, кибернетическую систему можно рассматривать как состоящую из частей (элементов), взаимодействующих друг с другом (рис. 4.4). В этом случае большинство выходных величин одной части одновременно являются входными величинами для другой части системы. Оставшиеся каналы остаются свободными, составляя входы и выходы всей системы в целом.
Движение системы представляют как цепь преобразований ее состояний. С одной стороны, можно полагать, что переход системы из состояния a1 в момент времени t1 в состояние a2 в момент времени t2 есть результат преобразования a1, t1 в a2, t2. С другой - можно рассматривать изменение выходных величин какой-либо системы под влиянием изменений входной величины так же, как ее преобразование.
Преобразование одного объекта в другой осуществляется посредством действия на объект оператора. Объект, подвергающийся преобразованию, называется операндом, а результат преобразования - образом. Пользуясь этими терминами, можно описать всякое преобразование следующим образом: в результате воздействия оператора на операнд получается образ.
При изучении выходной величины Y как результата преобразования входной величины X связь между Y и X записывается в форме
Y = KX,
где K - оператор, характеризующий свойства данной системы.
Если система выступает в виде безинерционного линейного преобразователя (например, электронный усилитель, механический редуктор, фотоэлемент), то оператор K преобразуется в коэффициент преобразования (коэффициент передачи) и представляет собой число k, на которое нужно умножить значение входной величины, чтобы получилось значение выходной величины преобразователя:
Y = kX.
Для нелинейного безинерционного преобразователя выходная величина является функцией от входной величины, и оператор K приобретает смысл символа F, обозначающего определенное нелинейное преобразование:
Y = F (X).
Состояние реальной системы не может измениться мгновенно, а происходит во времени в результате переходного процесса. В этом случае оператор становится сложнее и выражается не только при помощи одних алгебраических действий над операндами. Системы, переход которых из одного состояния в другое совершается не мгновенно, а в результате переходного процесса, называются динамическими системами.
Состояние, в котором находится система, когда ни одна из ее координат не изменяется, называется равновесным состоянием, которое наступает в некоторых точках пространства состояний.
Под переходным режимом понимается режим движения динамической системы из начального состояния к какому-либо установившемуся режиму -равновесному или периодическому.
Периодическим режимом называется режим, при котором система через равные промежутки времени приходит в одни и те же состояния.
Необходимым условием работоспособности динамических систем служит их устойчивость, характеризующая одну из важнейших черт поведения динамической системы и являющаяся важнейшим понятием в управлении. Это значит, что система должна нормально функционировать, быть нечувствительной к неизбежным посторонним возмущениям различного рода, т.е. работать устойчиво, несмотря на действие посторонних возмущений.
Для определения устойчивости разработаны соответствующие критерии, позволяющие найти условия устойчивости и необходимые ее “запасы” по косвенным признакам.
Рассмотрим понятие устойчивости динамической системы на примере системы установления цен на рынке с устойчивым и неустойчивым состоянием равновесия.
Пусть зависимости спроса -S и предложения P некоторого товара от цены C на рынке имеют вид, показанный на рис. 4.5, а скорость d изменения цены прямо пропорциональна разности между спросом и предложением:
d = k1 (S - P),
где k1 - коэффициент ( k1 >0 ), указывающий, на сколько возрастет цена товара в единицу времени, если разница между спросом и предложением будет равна единице.
|

Причины снижения спроса и увеличения предложения при повышении цены понятны. Повышение предложения при снижении цены ниже Ck возможно в частных случаях (например, при переходе на методы массового производства товара при снижении цен и росте спроса). На рис. 4.5. видно, что система имеет два равновесных состояния a1 и a2, ибо в этих точках спрос равен предложению и цена товара не изменяется (d=0). Для выяснения устойчивости состояний равновесия определим, как будет изменяться цена после случайного малого отклонения от равновесных значений C1 и C2. В точке a1 отклонению цены C от значения C1 соответствует разность S-P, которая вызывает изменение цены, восстанавливающее нарушенное равновесие; точка a1 изображает состояние устойчивого равновесия системы. В точке a2, наоборот, любое отклонение цены от C2 приводит к дальнейшему изменению в том же направлении, и состояние системы в этой точке неустойчиво.
Классификация систем
Управляемые системы, с которыми встречается человек, весьма разнообразны, поэтому целесообразно разбить их на некоторые классы. В классификации систем, предложенной С. Биром, в основу положены два критерия. Первый - степень сложности системы, по которому можно выделить три класса систем: простые, сложные и очень сложные.
Простые системы характеризуются малым числом внутренних связей и легкостью математического описания. Сложные системы, хотя и поддаются описанию, имеют разветвленную структуру и разнообразные внутренние связи. Наконец, к очень сложным относятся системы, не поддающиеся непосредственному математическому описанию ввиду исключительного многообразия и сложности связей.
Второй критерий - различие между детерминированными и вероятными системами. Детерминированной системой считают систему, в которой составные части взаимодействуют точно предвиденным образом (если известно предыдущее состояние, то безошибочно можно предсказать её последующее состояние).
Напротив, для вероятностной системы нельзя сделать точного детального предсказания. Для такой системы можно тщательно и с большой степенью вероятности установить, как она будет вести себя в любых заданных условиях. Однако система остаётся неопределённой, и любое предсказание относительно её поведения не выйдет из логических рамок вероятностных категорий, при помощи которых это поведение описывается.
Следует указать на некоторую условность подобного разделения систем. Границы между ними являются областями, в которых лежат близкие по характеру системы. По мере развития математического аппарата и средств познания вообще границы сдвигаются в сторону упрощения систем, их детерминированности.
Роль руководителя сводится к тому, чтобы преобразовать производство в систему менее сложную и вероятностную, свести к минимуму влияние случайных факторов на работу предприятия.
В результате при двух классификационных признаках все системы можно разделить на пять категорий: простые и сложные детерминированные; простые, сложные и очень сложные вероятностные (см. рис. 4.6).
Приведём примеры перечисленных систем применительно к сфере промышленного производства.
К числу простых детерминированных систем относится система размещения станков в цехе. Она строится исходя из условия движения деталей по маршрутам обработки. При такой постановке задачи можно минимизировать расстояния, которые проходят детали в процессе обработки. Если исследуются процессы, происходящие при движении материалов, то система становится вероятностной. Абстрактная система детерминирована, но она теряет это свойство, как только на систему накладывается влияние реальной действительности.
|

Сложной детерминированной системой является электронная вычислительная машина. ЭВМ выполняет только предписанные ей операции. Если её поведение определено заранее не полностью, то это означает, что машина функционирует неправильно. К этому классу систем относятся также различные автоматы (вплоть до автоматизированных предприятий), в которых любое отклонение от строго предписанного образа действий считается неисправностью или даже аварией.
В качестве простой вероятностной системы назовем систему статистического контроля качества продукции предприятия. Она основана на выборочной проверке либо одной, либо нескольких характеристик продукции (влажность и зольность отгружаемого шахтой угля), причем частота отбора проб зависит от степени риска отбраковки. Такая система весьма проста, целесообразность её применения связана с присущей ей вероятностной природой.
Наглядная иллюстрация сложной вероятностной системы - система материально-технического снабжения предприятия. Поступление материалов или деталей на центральный склад и выдача их на участки являются случайными процессами по своей природе, но в то же время они полностью поддаются математическому описанию при помощи аппарата математической статистики. Даже когда динамика системы значительно усложнена, т.е. имеет очень много входов (запасы пополняются из многих источников) и выходов (запасами пользуется большое число потребителей), её все-таки следует отнести к указанному классу.
Наконец, к очень сложной вероятностной системе относится само предприятие в целом. Внутренние связи крупного предприятия (технические, экономические, административные и др.) настолько сложны, что полностью описать их пока невозможно. То же самое в неизмеримо большей степени относится к мозгу человека.
Группировка систем в соответствии со свойственной им природой управления позволяет выделить научные методы исследования. Инструментарий системного анализа и исследования операций, средства вычислительной техники достигли такого уровня развития, что позволяют успешно решать задачи управления как простыми, так и сложными детерминированными системами. Простые вероятностные системы сравнительно легко поддаются анализу методами математической статистики. Наибольшую трудность для управления и исследования представляют два последних класса вероятностных систем - сложные и очень сложные (подавляющее большинство систем в обществе и производстве). До недавнего времени управление ими основывалось на опыте и здравом смысле. С точки зрения реальных потребностей сегодняшнего дня этого явно недостаточно. Человек уже не в состоянии решать стоящие перед ним проблемы управления, полагаясь только на свой собственный разум и не прибегая к помощи математико-аналитических и программно-технических средств.
Возникшие потребности в научно обоснованных методах и средствах управления нашли свое выражение в кибернетике - науке об управлении и системном анализе, особым предметом исследования которых являются сложные и очень сложные системы окружающего мира.
|
из
5.00
|
Обсуждение в статье: Особенности управляемых систем |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы