 |
Главная |


III Проекция ускорения на естественные оси.
|
из
5.00
|
Естественными осями при изучении криволинейного движения на плоскости принято считать касательную и нормаль к траектории. Тангенциальная и нормальная компоненты векторов часто позволяют полнее раскрыть физический смысл рассматриваемого движения. Вводимые ниже понятия напоминают те, которыми мы пользовались в полярной системе координат, но они не зависят от выбора системы отсчёта.
Задача 11. Движение точки в плоскости описывается в декартовых координатах как x=x(t), y=y(t). Определить проекции скорости и ускорения на естественные оси, а также радиус кривизны траектории.
|
Рис. 7. Касательная и нормаль |

Направим координатные оси τ и n вдоль касательной и нормали к траектории, как показано на Рис. 7. Обозначим eτ и en единичные векторы вдоль соответствующих осей. Вектор eτ направлен вдоль скорости:
 .
.
Формула  позволяет получить удобное выражение для тангенциального ускорения. Продифференцировав её по времени, получим
позволяет получить удобное выражение для тангенциального ускорения. Продифференцировав её по времени, получим
 .
.
Так как длина вектора  не меняется, то
не меняется, то  направлен ортогонально к . Отсюда
направлен ортогонально к . Отсюда
 . ( 19 )
. ( 19 )
Вектор нормали en ищем в виде
 ,
,
где подлежащие определению проекции a и b удовлетворяют условиям нормировки

и ортогональности:
 .
.
Из двух решений этой системы уравнений мы выбираем такое, при котором вектор нормали направлен в сторону вогнутости траектории, как на Рис. 7:
 .
.
Проекция ускорения на касательную wτ равна скалярному произведению
 . ( 20 )
. ( 20 )
Аналогично вычисляем wn:
 . ( 21 )
. ( 21 )
Перейдём к вычислению радиуса кривизны ρ траектории в данной точке. Он задаётся условием
|
Рис. 8 Радиус кривизны. |

 ,
,
где ds — смещение вдоль траектории, соответствующее изменению угла dφ. Обе эти величины на Рис. 8 считаем бесконечно малыми. Следовательно, можно пренебречь изменением абсолютной величины скорости на отрезке ds и воспользоваться известной формулой для центростремительного ускорения при равномерном движении по окружности:
 .
.
Подставляя сюда ( 21 ), приходим к
 .
.
Радиус кривизны бесконечно велик в случае прямолинейной траектории.
|
Рис. 9. |
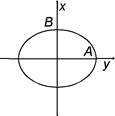
Задача 12. Точка описывает эллипс
 .
.
Определить нормальную и тангенциальную компоненты ускорения, а также радиус кривизны траектории в точках A и B Рис. 9.
Рассматриваемое движение является частным случаем Задача 1. Подставив ( 5 ) в ( 20 ), приходим к
 .
.
Аналогичным путём получаем формулы для нормального ускорения

и для радиуса кривизны
 .
.
Подставляя в них зависимость x и y от времени, получаем для точки A:

и для точки B:
 .
.
Задача 13. Частица движется в плоскости по траектории r=acosφ. В начальный момент времени φ=0, а скорость направлена перпендикулярно радиус‑вектору. Секторная скорость постоянна и равна K/2. Определить связь между модулями v и r , а также компоненты ускорения: тангенциальную, нормальную, радиальную и трансверсальную.
При постоянном K величина v однозначно выражается уравнением траектории:
 .
.
Здесь мы воспользовались обозначениями Задача 6 и формулой ( 15 ). Подставляя
 ,
,
приходим к следующему выражению для v2:
 ,
,
откуда
 .
.
|
Рис. 10. Компоненты вектора ускорения. |
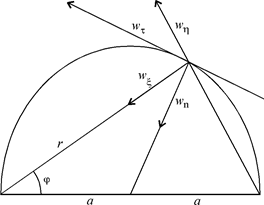
В интервале углов  траектория представляет собой окружность радиусом a/2 с центром в точке x=a/2, y=0. На Рис. 10 показаны все четыре компоненты вектора ускорения.. Тангенциальное ускорение направлено по касательной к траектории. Воспользуемся формулой ( 19 ) Задача 11:
траектория представляет собой окружность радиусом a/2 с центром в точке x=a/2, y=0. На Рис. 10 показаны все четыре компоненты вектора ускорения.. Тангенциальное ускорение направлено по касательной к траектории. Воспользуемся формулой ( 19 ) Задача 11:
 . При известных значениях скорости и радиуса кривизны нормальное ускорение рассчитываем по формуле
. При известных значениях скорости и радиуса кривизны нормальное ускорение рассчитываем по формуле
 .
.
Трансверсальное ускорение равно нулю. Вычисление радиальной компоненты можно упростить следующим образом. Нам известны компоненты вектора  в разложении по
в разложении по  и
и  . Из Рис. 10 видно, что они равны cosφ и sinφ соответственно. Компонента wξ равна скалярному произведению векторов w и eξ:
. Из Рис. 10 видно, что они равны cosφ и sinφ соответственно. Компонента wξ равна скалярному произведению векторов w и eξ:  .Подставляя сюда полученные выше выражения для wn и wτ , получаем
.Подставляя сюда полученные выше выражения для wn и wτ , получаем  .Тело движется под действием притягивающей силы, величина которой обратно пропорциональна r5.
.Тело движется под действием притягивающей силы, величина которой обратно пропорциональна r5.
[1] Знаки a и b определяют квадрант, в котором находится гипербола.
|
из
5.00
|
Обсуждение в статье: III Проекция ускорения на естественные оси. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы