 |
Главная |


Моделирование с использованием имитационного пакета моделирования динамических систем Simulink
|
из
5.00
|
Для построения Simulink-модели системы (2. 3) нам необходимы следующие библиотеки:
· Continuous , содержащую блок интегрирования Integrator ;
· Math , содержащую блоки масштабирования и суммирования Gain и Sum;
· Sinks, содержащую блоки виртуальных регистраторов Scope (осциллограф для наблюдения временных и иных зависимостей).
· Sources , содержащую блоки единичного скачка Step .
В окне Simulink Library Browser на панели инструментов нажимаем кнопку Greate a new model (создание S-модели), и в открывшемся окне подготовки и редактирования функциональных схем выполняем построение структурной схемы (Рис. 8).
Далее необходимо выполнить редактирование параметров блоков. При вызове окон параметров путем активизации графических элементов в окнах библиотек отображаются установки параметров по умолчанию. Возможность изменения параметров появляется после переноса графических элементов в окно подготовки и редактирования функциональных схем.
В окне установки параметров первого интегратора Integrator в поле начальных значений Initial condition устанавливаем начальное условие: x 1 (0) =0. Остальные параметры принимают значения по умолчанию. В окне установки параметров второго интегратора Integrator 1 в поле начальных значений Initial condition устанавливаем начальное условие: x 2 (0) = 0. Остальные параметры имеют значения по умолчанию.
В окне установки параметров первого и второго источника одиночного перепада Step устанавливаем следующие параметры:
· Step time – время появления перепада – устанавливаем 0;
· Initial value – начальное значение воздействия 0 (по умолчанию);
· Final value – конечное значение воздействия 1 (по умолчанию);
· Sample time – эталонное время 0 (по умолчанию).

Рис 8
Блоки масштабирования Gain служат для масштабирования данных, т. е. умножения их на заданную коэффициент – константу. В окнах установки параметров всех четырех блоков в поле численных значений Gain установить соответствующие множители -1,79; 7,14; -2; -168 . Значение параметра Gain выводится внутри блока. Если входной сигнал и множитель относятся к разным типам, то Simulink пытается преобразовать тип множителя к типу входного сигнала, а когда это сделать не удается, выдает сообщение об ошибке. Флажок Saturate on integer overflow (подавлять переполнение для целых) дает возможность задать необходимость «урезания» результата умножения, если он превышает диапазон, установленный для целочисленных значений. Остальные параметры принимают значения по умолчанию (в частности в поле Multiplication выводится Element - wise [ K * u ]).
Окно настройки блока сложения/вычитания предполагает вид представления блока round(круглый), rectangular(квадратный) и число входов с выполняемыми по ним операциями. Число входов и операций задаются шаблоном List of signs. Например, шаблон | + + означает, что блок имеет два суммирующих входа, а | + - + означает, что он имеет три входа, причем, средний вычитающий, а крайние суммирующие.
Окно параметров виртуального осциллографа с открытой вкладкой General содержит следующие параметры: Number of axes – количество каналов, позволяющий преобразовать одноканальный осциллограф в многоканальный; Time range – пределы временного интервала; Tick labels – вывод/скрытие отметок по осям; Sampling – установка временных соотношений (Decimation – в десятичных долях времени со значением по умолчанию 1 или Simple Time – в тактах эталонного времени, по умолчанию 0). Окно параметров виртуального осциллографа с открытой вкладкой Data history позволяет задать максимальное число точек осциллограмм для хранения и задать параметры хранения осциллограмм в рабочем пространстве системы MATLAB.
Назначение кнопок панели инструментов виртуального осциллографа представлено на рис. 9.
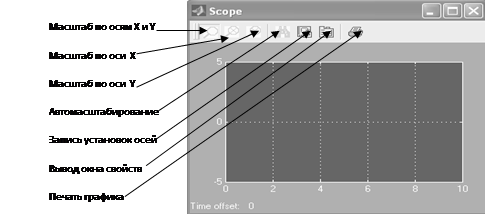 |
Рис 9
Удобной является кнопка «Автомасштабирование», которая позволяет установить такой масштаб, при котором изображение осциллограммы имеет максимально возможный размер по вертикали и отражает весь временной интервал моделирования.
После редактирования параметров блоков выполняется запуск процесса моделирования нажатие кнопки Start simulation на панели инструментов окна модели пакета Simulink. Результат моделирования, отражающий движение системы, представлен на рис. 10, 11.(изменения во времени переменных состояния системы x1(t) и x2(t)).


Рис 10 рис 11
Полученные графики полностью совпадают с графиками, полученными моделированием в режиме командной строки, с использованием встроенных средств и с использованием пакета расширения Symbolic Math Tolbox .
|
из
5.00
|
Обсуждение в статье: Моделирование с использованием имитационного пакета моделирования динамических систем Simulink |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы