 |
Главная |


Выбор типа регулятора давления и определение его параметров
|
из
5.00
|
По номограмме рис.5 [3] выбираем ПИ-регулятор.
Оптимальные параметры настройки ПИ-регулятора рассчитываются по частотным характеристикам [3].
 |
Строится АФЧХ объекта управления (рис.2.2.1)
Рис. 3.2.1. АФЧХ объекта управления.
По АФЧХ объекта управления строится АФЧХ разомкнутой системы для  и нескольких (любых) значений
и нескольких (любых) значений  , удобных для построения характеристик
, удобных для построения характеристик
| 2.2.1 |
При этом каждый вектор АФЧХ объекта управления следует повернуть на 90º по часовой стрелке и уменьшить в  раз. Затем из начала координат проводится прямая линия под углом β к вещественной отрицательной полуоси и строятся окружности с центром на этой оси, касающиеся АФЧХ и этой прямой (рис.2.2.2).
раз. Затем из начала координат проводится прямая линия под углом β к вещественной отрицательной полуоси и строятся окружности с центром на этой оси, касающиеся АФЧХ и этой прямой (рис.2.2.2).

| (2.2.2) |
Показатель колебательности М выбирается равным 1.6.
Предельное значение коэффициента передачи регулятора для каждого значения времени изодрома определяется по формуле [3]
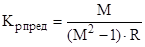
| (2.2.3) |
Значения предельных коэффициентов передачи регулятора при различных значениях времени изодрома приведены в таблице 3.2.1.
Таблица 2.2.1. Предельные значения коэффициента передачи регулятора.
|
| R
| 
|
| 0.7 | 5.9 | 0.17 |
| 1.0 | 3.9 | 0.26 |
| 1.5 | 2.6 | 0.39 |
| 2.0 | 1.9 | 0.54 |
| 2.5 | 1.6 | 0.64 |
По результатам расчета в плоскости параметров настройки регулятора  и
и  можно построить границу области, в которой максимум АЧХ замкнутой системы относительно воздействия не превышает заданного значения. Оптимальной настройке регулятора соответствует точка в этой области, для которой соотношение / максимально. Этому условию удовлетворяет точка касания касательной, проведенной к границе области допустимого запаса устойчивости из начала координат.
можно построить границу области, в которой максимум АЧХ замкнутой системы относительно воздействия не превышает заданного значения. Оптимальной настройке регулятора соответствует точка в этой области, для которой соотношение / максимально. Этому условию удовлетворяет точка касания касательной, проведенной к границе области допустимого запаса устойчивости из начала координат.
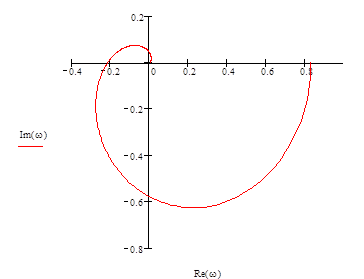
Расчет и построение АФЧХ разомкнутой системы с использованием программы Mathcad 2000.
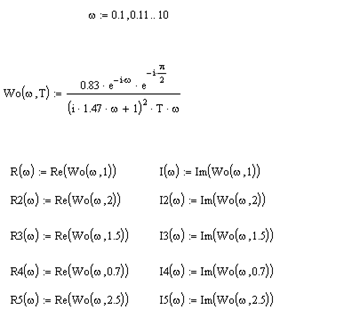
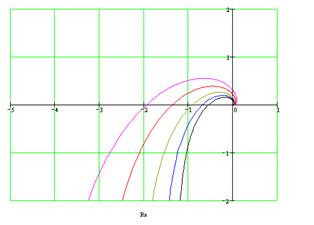
Рис. 3.2.2. АФЧХ разомкнутой системы.
Анализ качества замкнутой системы
Передаточная функция ПИ-регулятора имеет вид
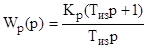
| (2.3.1) | ||
|
| (2.3.2) | ||
Передаточная функция замкнутой системы по управлению рассчитывается по выражению
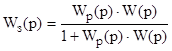
| (2.3.3) |
где  - передаточная функция регулятора,
- передаточная функция регулятора,  - передаточная функция объекта управления.
- передаточная функция объекта управления.
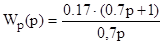
После подстановки числовых значений и некоторых преобразований

| (2.3.4) |
При аппроксимации  выражение (3.3.4) принимает вид
выражение (3.3.4) принимает вид

| (2.3.5) |
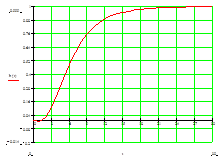
Переходная функция h(t), соответствующая реакции замкнутой системы с передаточной функцией  на единичную ступенчатую функцию 1(t), находится по ее изображению с помощью обратного преобразования Лапласа.
на единичную ступенчатую функцию 1(t), находится по ее изображению с помощью обратного преобразования Лапласа.
| (2.3.6) |
Обратное преобразование Лапласа проведено с использованием программы Mathcad 2000.

| (2.3.7) |
Рис.3.3.1. Реакция замкнутой системы на единичное ступенчатое воздействие.
По графику переходного процесса (рис.2.3.1) можно определить время регулирования - 21 с. Перегулирование σ = 0. Переходный процесс монотонный.
|
из
5.00
|
Обсуждение в статье: Выбор типа регулятора давления и определение его параметров |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы