 |
Главная |


Методические указания к решению задачи 3
|
из
5.00
|
При круговой интерполяции следует использовать оценочную функцию вида:
Fi = xi2 + yi2 – R2.
При отработке траектории в 1 квадранте против часовой стрелки, если применяется обычный алгоритм интерполяции, то расчетные соотношения примут вид:
· если Fi ≥ 0 (нахождение за пределом радиуса окружности), то шаг делается вдоль отрицательного направления оси х, т. е. хi+1 = xi – 1
Fi+1 =(xi – 1)2 +yi2 – R2 = Fi – 2xi + 1,
· если Fi < 0, то шаг делается в положительном направлении оси у, т. е. yi+1 = yi + 1
Fi+1 =xi 2 + (yi +1)2 – R2 = Fi + 2yi + 1.
При применении усовершенствованного алгоритма рекомендуется разбить квадрант пополам (π/4). При изменении угла от φ = 0, до φ =π/4 и при Fi ≥ 0 выдача шагов осуществляется по обеим координатам:
Fi+1 =(xi – 1)2 +(yi +1)2 – R2 = Fi – 2(xi – yi) + 2,
а при Fi < 0 только по ведущей координате (уi)
Fi+1 = Fi + 2yi + 1.
При изменении угла от π/4 до π/2 и Fi < 0 выдача шагов производится по обеим координатам, а при Fi ≥ 0 только по ведущей координате (хi)
Fi+1 = Fi – 2xi + 1.
Следует отметить, что при усовершенствованном алгоритме интерполяции затрачивается меньшее число тактов, что приводит к увеличению контурной скорости отработки траектории.
Если перемещение должно осуществляться в других квадрантах в выбранном направлении (по часовой стрелке или против часовой стрелки), то аналогично рассмотренному выше можно получить необходимые расчетные соотношения для Fi+1.
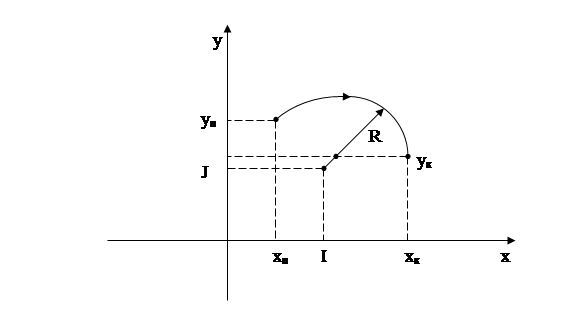
Приведенный ниже алгоритм предназначен для реализации метода оценочной функции во всех 4 квадрантах при движении в любом направлении [5]:
Принятые обозначения: I, J – координаты центра дуги;
r – радиус дуги;
τ – такт;
F – скорость подачи, мм/ мин;
d = h – дискретность системы ЧПУ, мм;
ун, хн – начальная точка;
ук, хк – конечная точка.
CIR: if TAKT > 1 then go to CYCLE
read xн , ун , хк ,ук , I, J, ±F
r = sqr((xн – I)2 + (ун - J)2)
x = xн ; y = ун ; codx = x; cody = y; f = 0
U= int(F*τ/(60*d));
if xн = I and ун > J then αн = π/2
if xн = I and ун < J then αн = 3*π/2
if xн > I then αн = atn((ун – J)/( xн – I))
if xн < I then αн = π + atn((ун – J)/( xн – I))
if xк = I and ук > J then αк = π/2
if xк = I and ук < J then αк = 3*π/2
if xк > I then αк = atn((ук – J)/( xк – I))
if xк < I then αк = π + atn((ук – J)/( xк – I))
if sgn(αн - αк) = sgn(U) then ∆α = abs(αн - αк)
else ∆α = 2π - abs(αн - αк)
L = 4 * r * ∆α/π ; l = 0
CYCLE: X = x – I; Y = y – J;
if abs(X) >= abs(Y) and sgn(f*sgn(X)*sgn(Y)) = sgn(U)
then(y = y – U*sgn(X); f = f – 2*Y*sgn(X) + U; go to END);
if abs(X) < abs(Y) and sgn(f*sgn(X)*sgn(Y) < > sgn(U)
then (X = X + U*sgn(Y); f = f + 2*X*sgn(Y) + U; go to END);
x = x + U*sgn(Y); y = y – U*sgn(X);
f = + 2*(abs(X) – abs(Y))*sgn(Y) + 2*U;
END: l = l + abs(X – codx) + abs(y – cody);
codx = x; cody = y;
if l < L then TAKT = TAKT + 1
else TAKT = 1
RETURN
Ниже приводится листинг программы на языке Си, которая реализует алгоритм оценочной функции, приведенный выше, с небольшими модификациями. Скорость подачи принята 1 шаг за один цикл алгоритма, направление движения по окружности зависит от введенных координат центра, начальной и конечной точек.
# include < stdio . h > /* Подключение библиотеки стандартных функций ввода-вывода */
# include < math . h > /* Подключение библиотеки математических функций */
#define PI 3.1415 /* Определение числа p */
#define SGN(a) (((a) >= 0) ? 1 : -1) /* Определение макроса для вычисления знака переменной; макрос возвращает 1, если значение переменной ≥0 и возвращает -1, если значение переменной <0 */
int x _ n , y _ n , x _ k , y _ k , I , J ; /* Объявление целочисленных входных переменных для алгоритма: x _ n – начальная точка по оси X , y _ n – начальная точка по оси Y , x _ k – конечная точка по оси X , y _ k – конечная точка по оси Y , I – координата центра по оси X , J – координата центра по оси Y */
int x , y , r , codx , cody , f , L , l , X , Y ; /* Объявление целочисленных внутренних переменных алгоритма: x , y – текущие координаты, r – радиус дуги, codx , cody – переменные для передачи координат исполнительному устройству, f – значение оценочной функции, L – полная длина пути по дуге, l – текущая пройденная длина, X , Y – разница между текущими координатами и центром окружности */
float a _ n , a _ k , da ; /* Объявление вещественных внутренних переменных алгоритма: a _ n – начальный угол в радианах, a _ k – конечный угол в радианах, da – отрабатываемый по дуге угол ( a _ k – a _ n ) */
/* Определение функции инициализации алгоритма */
void init() {
printf ("Введите x _ n , y _ n , x _ k , y _ k , I , J : "); /* Вывод сообщения с просьбой ввести значения входных переменных */
scanf ("% d % d % d % d % d % d ", & x _ n , & y _ n , & x _ k , & y _ k , & I , & J ); /* Ввод входных переменных пользователем */
r = sqrt((x_n - I)*(x_n - I) + (y_n - J) * ( y_n - J)); /* Вычисление радиуса дуги */
x = x_n;
y = y_n;
codx = x;
cody = y;
f = 0; /* Установка начальных значений внутренних переменных */
/* Вычисление начального угла по значениям x _ n , y _ n , I , J */
if(x_n == I && y_n > J)
a_n = PI / 2;
if(x_n == I && y_n < J)
a_n = 3 * PI / 2;
if(x_n > I)
a_n = atan((y_n - J) / (x_n - I));
if(x_n < I)
a_n = PI + atan((y_n - J) / (x_n - I));
/* Вычисление конечного угла по значениям x _ k , y _ k , I , J */
if(x_k == I && y_k > J)
a_k = PI / 2;
if(x_k == I && y_k < J)
a_k = 3 * PI / 2;
if(x_k > I)
a_k = atan((y_k - J) / (x_k - I));
if(x_k < I)
a_k = PI + atan((y_k - J) / (x_k - I));
da = a _ n - a _ k ; /* Вычисление угла поворота */
L = floor (4 * r * fabs ( da ) / PI + 0.5); /* Вычисление длины пути по дуге */
l = 0; /* Установка текущей длины пути в 0 */
printf("init: r=%d, a_n=%f, a_k=%f, da=%f, L=%d\n", r, a_n, a_k, da, L); /* Вывод на экран результатов инициализации */
}
/* Функция расчета очередного шага алгоритма оценочной функции */
void circle() {
/* Вычисление разницы между текущими координатами и центром окружности */
X = x – I ;
Y = y - J;
/* Вычисление нового значения оценочной функции и перемещение по соответствующим осям в зависимости от текущих координат и текущего значения оценочной функции */
if(abs(X) >= abs(Y) && SGN(f) * SGN(X) * SGN(Y) == SGN(da)) {
y = y - SGN ( X ) * SGN ( da ); /* Изменение координаты y */
f = f - 2 * Y * SGN ( X ) * SGN ( da ) + 1; /* Изменение значения оценочной функции */
}
else
if(abs(X) < abs(Y) && SGN(f) * SGN(X) * SGN(Y) != SGN(da)) {
x = x + SGN ( Y ) * SGN ( da ); /* Изменение координаты x */
f = f + 2 * X * SGN ( Y ) * SGN ( da ) + 1; /* Изменение значения оценочной функции */
}
else {
x = x + SGN ( Y ) * SGN ( da ); /* Изменение координаты x */
y = y - SGN ( X ) * SGN ( da ); /* Изменение координаты y */
/* Изменение значения оценочной функции */
f = f +2 * ( abs ( X ) - abs ( Y )) * SGN ( Y ) * SGN ( X ) * SGN ( da )+ 2 * 1;
}
l = l + abs ( x - codx ) + abs ( y - cody ); /* Изменение пройденного пути */
codx = x ; cody = y ; /* Установка переменных для передачи исполнительному устройству */
printf (" f =% d \ tcodx =% d \ tcody =% d \ tl =% d \ n ", f , codx , cody , l ); /* Вывод результатов очередного шага алгоритма на экран */
}
/* Главная функция программы, с нее начинается выполнение */
int main () {
/* Вызов функции инициализации алгоритма оценочной функции */
init();
/* В этом месте можно передать начальные координаты cod _ x и cod _ y (равные x _ n и y _ n ) на исполнительное устройство */
/* Организация циклического вызова функции расчета очередного шага оценочной функции до тех пор пока текущий пройденный путь меньше полной длины пути по дуге */
while(l < L) {
circle();
/* В этом месте можно передать рассчитанные координаты cod _ x и cod _ y на исполнительное устройство */
}
return 0; /* Завершение главной функции программы */
}
|
из
5.00
|
Обсуждение в статье: Методические указания к решению задачи 3 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы