 |
Главная |


Конструкция индукционного датчика угла с подвижной катушкой
|
из
5.00
|
Реферат
Рамочный датчик угла, индукционный датчик угла с подвижной катушкой, магнитопровод, ротор, статор, обмотка.
Объектом исследования является рамочный индукционный датчик угла.
Цель работы – расчет и проектирование рамочного индукционного датчика угла.
В процессе работы производится выбор необходимых параметров и обосновывается их выбор в процессе расчётов, которые включают в себя расчет магнитных и электрических величин.
Содержание
Введение
1. Теоретическая часть
1.1 Назначение и область применения
1.2 Конструкция индукционного датчика угла с подвижной катушкой
1.3 Принцип действия индукционного датчика угла с подвижной катушкой
1.4 Вывод формул для определения величины и крутизны выходного сигнала
1.5 Технические данные индукционных датчиков угла рамочного типа
1.6 Погрешности индукционного датчика угла с подвижной катушкой
1.7 Достоинства и недостатки рамочного датчика угла
2. Расчетно-конструкторская часть
2.1 Расчет параметров катушек и воздушного зазора
2.2 Расчет выходных параметров
Заключение
Список использованных источников
Введение
В гироскопических приборах наиболее широко применяются индукционные датчики угла и значительно реже фотоэлектрические, потенциометрические, емкостные.
Информация о физических величинах измеряемых гироприборами, содержится обычно в углах поворота одних конструктивных узлов гироприборов относительно других. Поскольку гироприборы в большинстве случаев используют в качестве датчиков систем автоматического управления, возникают задачи измерения этих углов с высокой точностью и представления полученной информации в наиболее удобной для дальнейшего использования форме.
Простейшие способы измерения углов, например с помощью круговых шкал и индексов, в современных гироприборах применяются редко. Широкое применение нашли различные типы специальных преобразователей угла поворота механических углов в электрический сигнал.
Такие преобразователи являются датчиками угла. Обычно ДУ состоят из двух частей: статора, устанавливаемого на неподвижной части, и ротора, устанавливаемого на подвижной части.
В данной работе рассматривается и производится расчет обмоток и параметров индукционного рамочного датчика угла: величины зазора между статором и ротором, эффективного числа витков обмотки возбуждения, эффективного число витков вторичной обмотки, сечение провода обмотки возбуждения, длины пакета статора.
Теоретическая часть
Назначение и область применения
Индукционные датчики угла рамочного типа представляют собой устройства, выходной электрический сигнал которых пропорционален угловому перемещению вторичной обмотки в магнитном поле, создаваемом обмоткой возбуждения.
В гироскопических приборах для определения угла поворота подвижной системы часто используют индукционные датчики угла с подвижной катушкой, которые часто называют рамочными датчиками (РДУ). РДУ в основном используется в двухстепенных гироскопических приборах средней и высокой точности для измерения малых углов поворота подвижной части прибора относительно неподвижной.
Конструкция индукционного датчика угла с подвижной катушкой
Схемы рамочных датчиков имеют различные конструктивные варианты. Конструкция датчика определяется в первую очередь назначением, во вторую – конструкцией прибора в целом.
Основными величинами, характеризующими работу датчика угла, являются:
а) потребляемые мощность и ток при номинальных значениях напряжения возбуждения и частоты сети;
б) рабочий диапазон угла поворота;
в) крутизна выходной характеристики;
г) степень линейности выходного напряжения в зависимости от угла поворота ротора;
д) симметрия выходного напряжения в зависимости от изменения знака угла;
е) остаточная э.д.с. в нулевом положении;
ж) выходное сопротивление датчика;
и) значение реактивного момента.
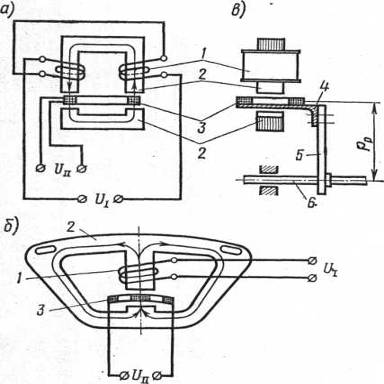
Индукционный датчик с подвижной катушкой представляет собой дифференциальный трансформатор с воздушным зазором, вторичная (сигнальная) обмотка которого располагается в воздушном зазоре. Существует две схемы рамочных датчиков. На рисунке 1, а представлена схема рамочного датчика, дифференциального по потоку, а на рисунке 1, б - схема датчика, дифференциального по э. д. с.
В обеих схемах (рисунок 1, а и б) катушки возбуждения 1 располагаются на полюсах магнитопровода 2 и питаются переменным напряжением. В воздушных зазорах магнитопроводов располагаются плоские сигнальные катушки 3, которые крепятся на специальных кронштейнах 4 (рисунок 1, в), жестко связанных с помощью рычага 5 с осью 6, угол поворота которой требуется измерить.
При поворотах оси прибора сигнальная катушка (рамка) перемещается в зазоре магнитопровода перпендикулярно магнитным силовым линиям потока возбуждения.
 |
Элементы рамочных датчиков имеют следующее конструктивное решение: катушки — плоские, прямоугольной или круглой формы; обмотка катушек выполняется медным проводом, диаметром порядка 0,03…0,05 мм (для сигнальных катушек) и 0,08…0,12 мм (для катушек возбуждения). Катушки возбуждения крепятся на специальном плоском кронштейне, который часто выполняется из пластмассы и имеет на своей поверхности углубления для размещения катушек. Катушки укрепляются на кронштейне с помощью клея или лака. В другой модификации сигнальные катушки укладываются в специальные формы и заливаются синтетической смолой. После застывания смолы получается монолитная деталь. Кронштейн с сигнальными катушками крепится к рычагу обычно винтами.
Магнитопровод датчика набирается из листов электротехнической стали или пермаллоя. Магнитопровод обычно укрепляется на корпусе прибора, рамка — на оси чувствительного элемента. Крепление магнитопровода должно предусматривать возможность регулировки его углового положения. В некоторых гироскопических приборах магнитопровод крепится на подвижном элементе прибора. Это делается для сокращения числа токоподводов к подвижному узлу прибора, так как катушки возбуждения датчика могут быть подключены параллельно со статорными обмотками гиромотора, следовательно, дополнительных токоподводов не требуется. Однако в этом случае, кроме заметного возрастания момента инерции гироузла, возможно появление дополнительных моментов тяжения вокруг выходной оси прибора, обусловленных наличием в конструкции чувствительного элемента значительных ферромагнитных масс.
|
из
5.00
|
Обсуждение в статье: Конструкция индукционного датчика угла с подвижной катушкой |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы