 |
Главная |


ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ РОБОТИЗИРОВАННОГО ТЕХНОЛОГИЧЕСКОГО КОМПЛЕКСА
|
из
5.00
|
Одна из основных задач робототехники - замена рабочих, занятых на вспомогательных операциях. Значительная часть промышленных роботов (ПР), занятых на вспомогательных операциях, обслуживают металлорежущие станки.
Здесь промышленной робот выполняет наиболее типичную вспомогательную операцию загрузки-разгрузки оборудования: установка обрабатываемой детали на станок и ее снятие после окончания обработки [2].
При проектировании роботизированных технологических комплексов (РТК) должны быть выбраны компоновочно-кинематические схемы манипуляторов и их параметры. Если схема выбрана, то ее параметры определяются исходя из условия, что загрузочные зоны технологического оборудования должны находиться в рабочей зоне манипулятора. Рабочей зоной манипулятора П P называется пространство,в котором может находитьсярабочий орган при функционировании манипулятора. Рабочая зона обычно составляет часть рабочего пространства манипулятора (ПР), т.е. пространства, в котором может находиться исполнительное устройство при функционировании манипулятора ПР.
Для рассматриваемых РТК будем считать, что рабочая зона совпадает с зоной обслуживания манипулятора ПP, т.е. пространством, в котором рабочий орган выполняет свои функции в соответствии с назначением манипулятора и установленными значениями их характеристик.
Одна из наиболее часто встречающихся задач кинематики РТК сводится к следующему: задается конечное число положений охвата манипулятора (точек позиционирования) и находятся соответствующие конфигурации манипулятора (для некоторых положений схвата может быть найдено несколько возможных конфигураций). Решение этой задачи, при которой учитываются только
29
переносные степени подвижности, выполняется, как правило, в следующей последовательности:
I) строят абсолютную систему координат (рекомендуется начало координат совмещать с точкой установки манипулятора на полу, две оси - в горизонтальной плоскости, третья - вертикальна;
2) по кинематической схеме определяют неизменяемые геометрические параметры и обобщенные координаты;
3) определяют координаты полюса схвата манипулятора в зависимости от геометрических параметров и обобщенных координат;
4) исходя из постановки задачи, определяют координаты точек позиционирования схвата;
5) определяются возможные значения геометрических параметров и пределов изменения обобщенных координат,
При выполнении указанных условий все точки позиционирования окажутся в рабочей зоне манипулятора.
В зависимости от системы управления ПР при построении вариантов траектории движения полюса схвата между точками позиционирования следует исходить или из последовательного изменения обобщенных координат, или из условия одновременного их изменения при выполнении заданного критерия качества (минимального расхода мощности, минимума времени срабатывания и др.).
4.1. Цель работы
Целью работы является ознакомление с начальным этапом проектирования РТК - определением геометрических параметров компоновочно-кинематической схемы манипулятора.
4.2. Задачи, решаемые при выполнении работы
I. На основании плана размещения технологического оборудования и предложенной кинематической схемы манипулятора определить варианты установки ПР;
30
2. определить предельные значения обобщенных координат манипулятора;
3. построить рабочую зону и рабочее пространство манипулятора ПР;
4. предложить варианты траекторий для перемещений в заданные точки позиционирования в последовательности: СВ-ТО1, TOI-T02, TО2 - СД.
4.3. Порядок выполнения работы
1. В соответствия с номером варианта выбрать структурную схему манипулятора (табл.4.1) и геометрические параметры технологического оборудования, обслуживаемого ПР (табл. 4.1 и рис. 4.1).
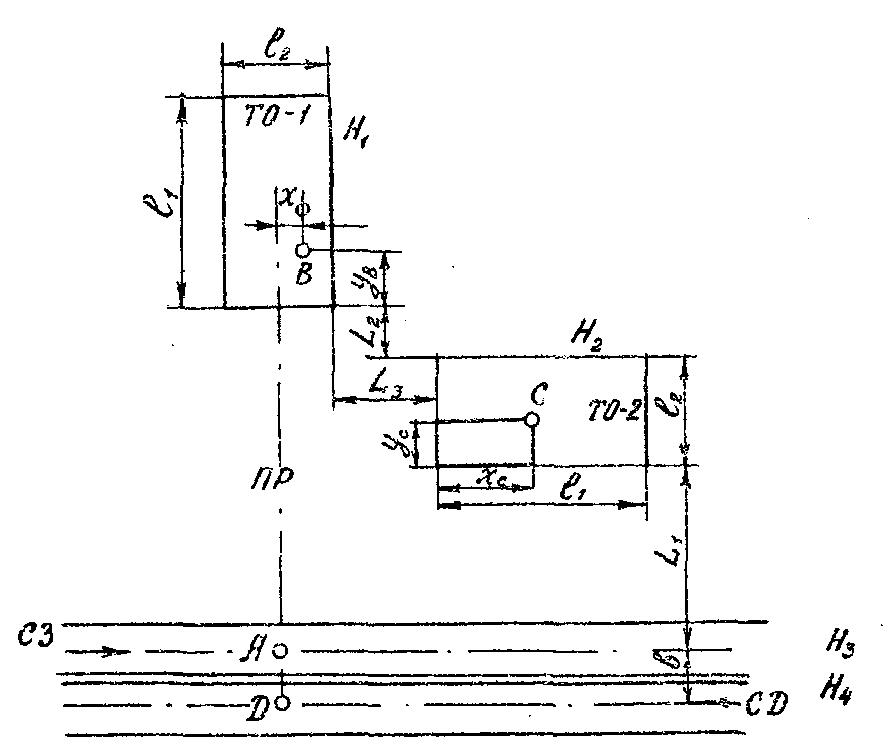
Рис.4.1. Робототехнический комплекс:
ТО- технологическое оборудование, ПР - зона установки промышленного робота, СЗ - стол для транспортировки заготовок, СД - стол для транспортировки обработанных деталей, А, В,С, D - точки позиционирования
2. Построить кинематическую схему манипулятора ПР с указанием обобщенных координат и предельных значений этих координат, подлежащих определению из условий размещения ПP ;
3. выбрать вариант расположения ПP и определить соответствующие ему предельные значения обобщенных координат;
31
4. построить рабочее пространство манипулятора и рабочую зону (зону обслуживания), соответствующую выбранному варианту расположения ПP;
5. определить варианты траекторий при последовательном изменении обобщенных координат и при их одновременном изменении.
Таблица 4.1
Структурные схемы манипуляторов
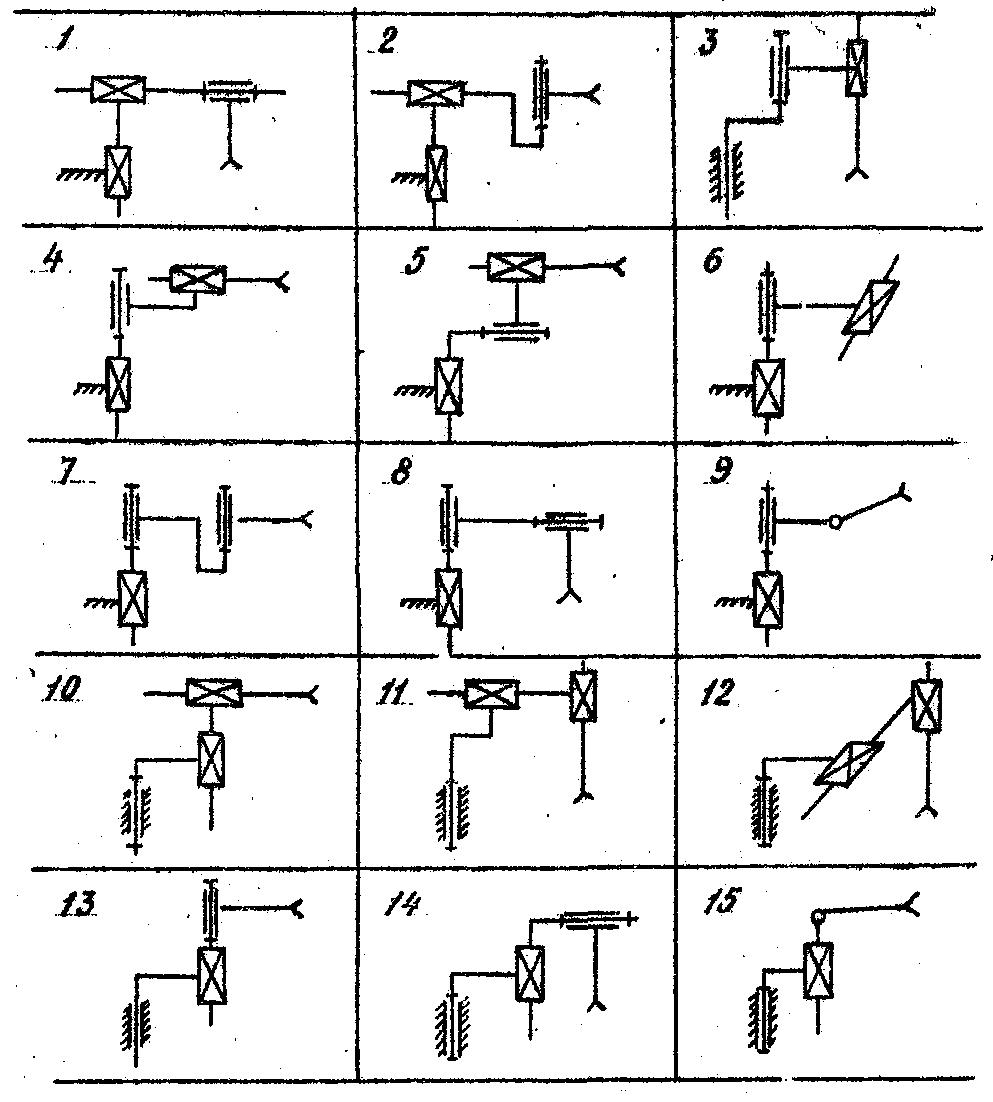
Условные обозначения роботов и манипуляторов приведены в приложении 2.
4.4. Содержание отчета
1. Наименование работы и ее цель.
2. Кинематическая схема манипулятора ПР с указанием обобщенных координат и пределов их изменения.
32
3. План размещения технологического оборудования и ПР с указанием геометрических параметров, определяющих предельные значения обобщенных координат.
4. Рабочее пространство манипулятора ПР и рабочая зона (зона обслуживания).
5. Варианты траекторий.
Пример
В данном приложении приведен пример определения геометрических параметров РТК с ПP, имеющий цилиндрическую зону обслуживания. На рис. 4.2 показана кинематическая схема манипулятора ПР, которому соответствуют
обобщенные координаты R, j и Z.
Предельные значения этих координат обозначены через Rо, R max, Zo, Zmax.
На рис. 4.3 показан вариант расположения ПР и соответствующее ему значение R max. По этому рисунку построены рабочее пространство и рабочая зона ПР (рнс.4.4). На рис. 4.5 показаны варианты траекторий.
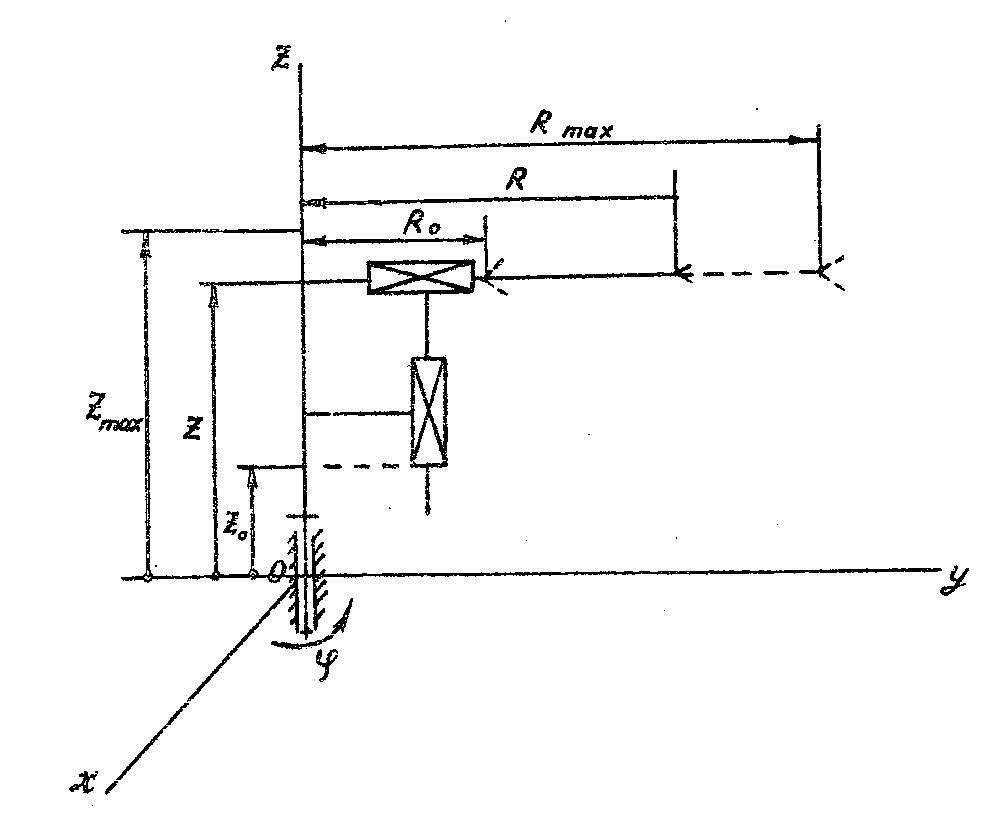
Рис. 4.2. Кинематическая схема манипулятора
Промышленного робота
33

Рис.4.3. Выбор расположения промышленного робота и
параметра R max

|
из
5.00
|
Обсуждение в статье: ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ РОБОТИЗИРОВАННОГО ТЕХНОЛОГИЧЕСКОГО КОМПЛЕКСА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы