 |
Главная |


УСТРОЙСТВО ПРОМЫШЛЕННОГО РОБОТА
|
из
5.00
|
Лабораторная работа № 1
I. Вводная часть
Лабораторная работа посвящена изучению конструкции, компоновки и кинематики промышленного робота.
Промышленный робот -это автоматически действующая машина для наполнения операций по перемещению различных объектов с целью автоматизации производственных процессов, отличающихся возможностью и быстротой перехода на новые операции.
Промышленный робот конструктивно состоит из следующих основных частей: исполнительной - в виде манипулятора-руки (или манипуляторов) и устройства передвижения для подвижного робота; управляющей - в виде управляющего устройства робота. Манипуляторы и устройства передвижения представляют собой исполнительные органы робота и соответственно являются объектом управления для управляющего устройства. Манипулятор робота представляет собой обычно многозвенный механизм с числом степеней подвижности от трех до девяти и поступательными или вращательными сочленениями, заканчивающийся рабочим органом в виде схвата (захвата), вакуумной присоски или какого-либо специального технологического инструмента (сварочная головка, пульверизатор, гайковерт
и т.п.). Каждая степень подвижности манипулятора имеет двигатель (пневматический, гидравлический, электрический). Существуют манипуляторы с одним двигателем на несколько степеней подвижности, снабженные механизмами распределения движения (муфты и т.п.).
В состав управляющего устройства конструктивно входят: пульт управления, с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство, в котором хранятся программы работы и
другая необходимая информация; вычислительное устройство, в котором реализуется алгоритм управления роботом; блок управления приводами манипулятора и устройства передвижения.
Промышленный робот имеет два режима работы: режим прог-раммирования, при котором в запоминающее устройство заносится программа
| функционирования робота, и режим выполнения технологической | операции. | |
| Тип промышленного робота характеризуется | следующими | основными |
| признаками: количество манипуляторов (механических рук), | количество | |
степеней подвижности, тип привода и системы управления, класс точности и тип исполнения.
| Признак | Наименование робота по данному | Возможное обозначение |
| признаку | ||
| 1 | 2 | 3 |
| Количество | С одним, двумя и более | IM, 2M |
| манипуляторов | манипуляторами: | |
| - с раздельными приводами и | Учитывается словесно в | |
| управлением; | наименовании | |
| - с раздельными приводами и | ||
| зависимым управлением; | ||
| - с общими приводами; | ||
| Количество | С двумя, тремя и более степенями | IM2, IM3….. |
| степеней | подвижности манипулятора: | 2M2……3M2 |
| подвижности | подвижный, неподвижный | Словесно в наименовании |
| робота(включая | ||
| устройство | ||
| передвижения) | ||
| Тип рабочей зоны | С рабочей зоной: | |
| манипулятора | - плоскости; | Пл. |
| - поверхности; | Пв. | |
| - в форме параллепипеда | Пр. | |
| Грузоподъёмность | Сверхлёгкий | В обозначении |
| манипулятора | Легкий | указываются |
| Средний | соответствующие | |
| Тяжелый | числовые значения (кг) | |
| Сверхтяжелый | ||
| Типы приводов | Пневматический | Пн. |
| манипулятора и | Гидравлический | Г |
| устройства | Электромеханический | Э |
| передвижений | С комбинированным приводом | Гпн., Гэ., Эпн. |
| Тип системы | С программным управлением (с | |
| управления: | разделением по типу движения по | |
| степеням): | ||
| - по принципу | цикловым | Ц |
| управления | позиционным | П |
| контурным | К | |
| комбинированным | ||
| Очувствленный робот: | О | |
| с адаптивным управлением | ||
| с неадаптивным управлением | ||
| с искусственным интеллектом | И | |
| -по числу | с индивидуальным управлением | Указывается |
| совместно | с групповым управлением | словесно |
| управляемых | ||
| роботов | ||
| Класс точности | С точностью позиционирования по | 0,1,2,3 |
| классу 0,1,2,3 | ||
| Тип исполнения | Нормальное: пылезащитное, | Указывается словесно |
| теплозащитное, взрывобезопасное |
Наиболее распространенный вариант конструктивного выполнения манипулятора - автономного от управляющего устройства - включает части приводов отдельных звеньев манипулятора и его рабочего органа - собственно двигателя, передаточные механизмы и чувствительные устройства обратной связи, вместе именуемые приводными устройствами. Кроме того, на манипуляторе можно разместить чувствительные устройства, дающие информацию о внешней среде в управляющее устройство робота в целом. Манипуляторы промышленных роботов имеют разомкнутые (открытые) кинематические связи, первые звенья (стойки) которых являются корпусом манипулятора, а последние - несут рабочие органы робота. По характеру движений, совершаемых манипуляторами с помощью переносных степеней подвижности, их делят на четыре группы: на работающие
в прямоугольной, цилиндрической, сферической и комбинированной системах координат.
К манипуляторам, работающим в прямоугольной системе координат, относятся те, переносные степени подвижности которых обеспечивают независимое изменение соответствующих им координат X ,Y и Z (рис.2.1) рабочего органа робота.
К манипуляторам, работающим в цилиндрической системе координат,
относятся те, переносные степени подвижности которых обеспечивают
независимое изменение соответствующих им координат r, φ и Z (рис 2.1) рабочего органа робота.
У манипуляторов, работающих в сферической системе координат переносные степени подвижности обеспечивают независимое изменение соответствующих координат ρ, φ и θ.
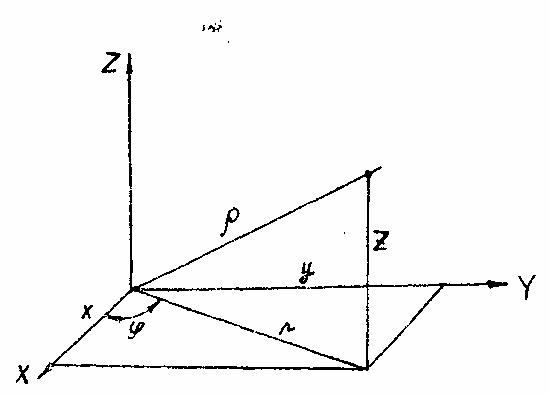
Рис 2.1 Рабочий орган робота
По типу приводных устройств роботы (как и манипуляторы) подразделяются на пневматические, гидравлические, электромеханические и комбинированные. Приводные устройства используются, а сочетании о передаточными механизмами и чувствительными устройствами обратной связи.
По способу размещения приводных устройств и принципу передачи движения от них соответствующим званьям манипулятора можно выделить четыре группы манипуляторов:
1) в которых приводные устройства расположены непосредственно в местах связи звеньев манипулятора так, что корпус приводного устройства связан с одним звеном, а ведомое звено- с другим;
2) в которых приводные устройства всех звеньев расположены на его неподвижном основании, а связь каждого приводного устройства со своим звеном осуществлена через передаточные механизмы;
3) в которых одно приводное устройство используется для привода нескольких (всех) звеньев манипулятора;
4) в которых используется комбинация трех основных способов размещения приводных устройств.
В соответствии с назначением робота в технологическом процессе конечные звенья манипуляторов снабжаются различного рода рабочими органами: захватными устройствами, обеспечивающими взятие и удержание объектов манипулирования; технологическими инструментами, с помощью которых выполняются основные технологические операции.
Захватные устройства можно классифицировать по способу захвата и удержания объектов и по наличию устройств очувствления.
По первому признаку захватные устройства делятся на механические, вакуумные, электромагнитные к комбинированные; по второму признаку - на неочувствлённые и очувствлённые.
Механические захватные устройства или схваты включают в себя приводное устройство, механизм зажима и захватывающие элементы - губки схвата. По виду используемого привода механические схваты подразделяются
на электромеханические, пневматические и гидравлические; а по виду движения губок - на схваты с поступательным и поворотным движениями губок, осуществляемыми соответствующими механизмами зажима.
Вакуумные захватные устройства в промышленных роботах представлены, главным образом, вакуумприсосами, удерживающими предает за счет разряжения воздуха, создаваемого его отсосом между поверхностью предмета и вакуумприсосом.
Электромагнитные захватные устройства, основной частью которых являются электромагнита, используются а большинство случаев для манипулирования -с ферромагнитными предметами,
Устройство передвижения робота является исполнительной частью робота и конструктивно состоит из приводных устройств и ходовой части.
Устройство передвижения робота классифицируют по принципу действия ходовой части: колесные, гусеничные, на электромагнитной подвеске, на воздушной подвеске, столоходящие, ползающие и т.д.
В промышленных роботах большее применение нашли устройства передвижения рельсовые колесного типа. Они имеют электрический и гидравлический приводы.
Цель работы
Целью данной работы является закрепление теоретических знаний об устройстве и конструктивная особенностях промышленных роботов и получение практических навыков их применения.
Задачи , решаемые при выполнении работы
1) Ознакомиться: с конструкцией промышленного робота, о устройством механизмов поворота, подъема, выдвижения руки, охвата, с элементами управляющего устройства.
2) Определить: кинематическую структуру промышленного робота основные признаки промышленного робота: количество степеней подвижности, тип привода, грузоподъемностью и т. д. вид захватного устройства или инструмента для выполнении технологической операции.
3) Установить параметры рабочей зоны манипулятора.
Порядок выполнения работы
В качестве объектов для изучения устройства промышленного робота используется робот «МФЮУ 15.00.00»
Для решения поставленных в данной лабораторной работе задач необходимо сделать следующее:
1)изучить конструкцию механической системы промышленного робота: а) механизма поворота, б) механизма подъема и опускания,
а) механизма выдвижения руки, г) балансира;
2) изучить основные элементы устройства управления, расположение органов управления и их назначение;
3) составить кинематическую схему взаимодействия основных элементов робота;
4) выявить основные элементы промышленного робота, пользуясь табл. 2.1;
5) изобразить схему рабочей зоны манипулятора, графически показать параметры рабочей зоны;
6) изучить устройство захватного устройства робота.
Лабораторная работа выполняется каждым студентом в соответствии с индивидуальным заданием, в котором указывается тип робота и конкретизируются его исходные параметры.
Правила техники безопасности при выполнении работы
1. К выполнению лабораторной работы студента допускаются только под непосредственным контролем преподавателя пли лаборанта, прошедшего специальное обучение по безопасному обслуживанию промышленного робота.
2. Категорически запрещается находиться в рабочей зоне промышленного робота при его работе в автоматическом режиме.
3. При изучении конструкции механической система робота отключить напряжение и установить переключатель "Автоматическое/Ручное" на панели оператора в пояснение "Ручное". Такое положение переключателя затормозит все работы.
4. Перед выполнением работа преподаватель должен убедиться в исправном состоянии основного и вспомогательного технологического оборудования и средств обеспечения безопасности (ограждений, блокировок, сигнализации и т.п.).
Требования в отчету
В отчете о проведении лабораторной работы должны быть указаны; а) название, цель и задачи лабораторной работы;
б) краткие сведения об устройстве промышленного робота
и его составных частей;
в) описание работы одного из элементов механической системы (механизма поворота, механизма подъема и опускания, механизма выдвижения руки и т.д.) в соответствии с индивидуальным заданием;
г) краткие сведения о назначении и основных элементах управляющего устройства;
д) кинематическая схема промышленного робота;
е) основные признаки промышленного робота в соответствии с табл.2.1
ж) схема рабочей зоны манипулятора;
з) тип и описание конструкции захватного устройства;
к) заключение.
|
из
5.00
|
Обсуждение в статье: УСТРОЙСТВО ПРОМЫШЛЕННОГО РОБОТА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы