 |
Главная |


Задание на курсовую работу
|
из
5.00
|
При фрезеровании заготовки погрешность обработки – ΔО вызвана упругими деформациями системы станок – приспособление – инструмент – деталь (СПИД) и зависит от колебаний составляющей силы резания PX . Колебание силы PX обусловлено изменением глубины резания t П , мм. Погрешность обработки ΔО определяется по выражению:
 , (1)
, (1)
где w – податливость системы шпиндель – стол, мкм/кН;
PX – составляющая силы резания, направленная вдоль стола фрезерного станка, Н.
Для заданной пары инструментального и обрабатываемого материалов по [4] выбираются значения коэффициентов и показателей степени: Ср = 8,25; x = 1,0; y = 0,75; λ = 1,1; q = 1,3; ν = 0,2. Податливость системы СПИД фрезерного станка 6Р12 (ширина стола 320 мм) w = 40мкм/кН.
Необходимо произвести синтез САР погрешности обработки ΔО с запасами устойчивости по фазе Δφ = 45°, по модулю Δ L  6дБ, позволяющей стабилизировать погрешность обработки ΔО с точностью ΔЗ = 0,1%ΔР при изменении t П в заданных пределах от t П max до t П min.
6дБ, позволяющей стабилизировать погрешность обработки ΔО с точностью ΔЗ = 0,1%ΔР при изменении t П в заданных пределах от t П max до t П min.
 1. Анализ исходных данных, разработка функциональной схемы САР
1. Анализ исходных данных, разработка функциональной схемы САР
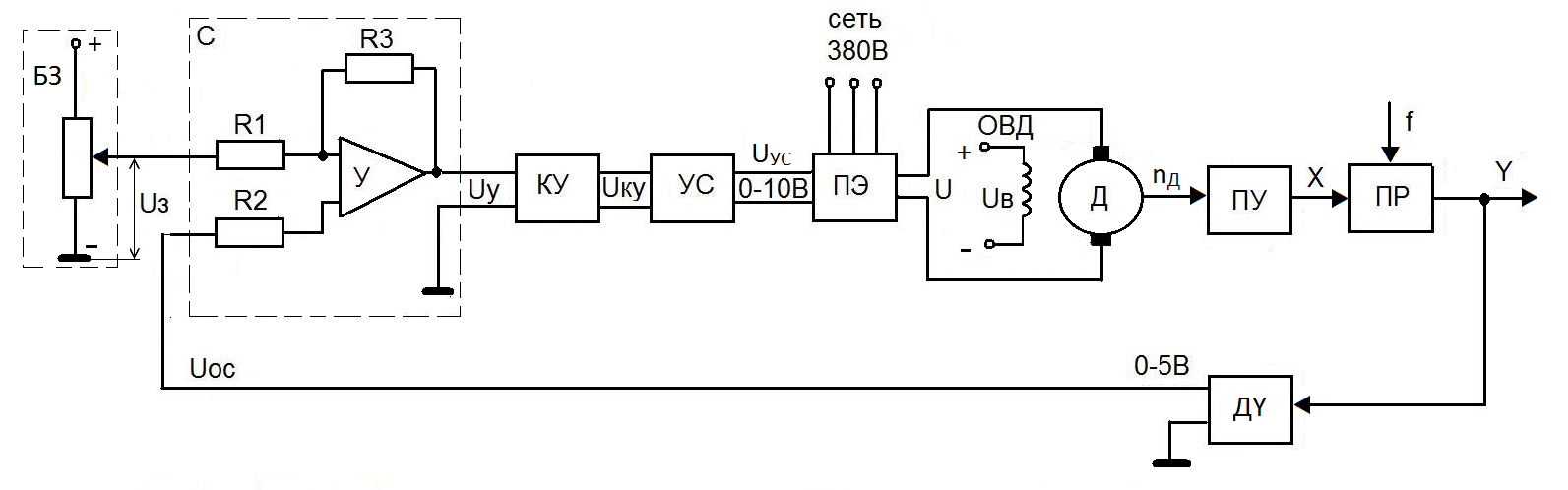
Схема взаимодействия электропривода и процесса резания приведена на рис. 1.
Рисунок 1. Схема системы автоматического регулирования (САР) выходной координаты.
САР регулирует выходную координату процесса резания с заданной точностью. Процесс резания на схеме обозначен функциональным блоком ПР., управляющая координата ПР обозначена –  , возмущающее воздействие –
, возмущающее воздействие –  . ПУ – передаточное устройство, это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процесса резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени
. ПУ – передаточное устройство, это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процесса резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени  . Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
. Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
ПЭ – преобразователь электрической энергии, преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь электрической энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени  и
и  .
.
УС – усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства
КУ – корректирующее устройство, корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ – блок задания. Блоком задания задается напряжение  , его величина определяет величину задания выходной координаты САР. БЗ содержит в себе источник стабилизированного напряжения
, его величина определяет величину задания выходной координаты САР. БЗ содержит в себе источник стабилизированного напряжения  и резистор R3.
и резистор R3.  В.
В.
ДУ – измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени  . При номинальном значении выходной координаты выдаёт напряжение
. При номинальном значении выходной координаты выдаёт напряжение  В.
В.
С – сумматор на базе операционного усилителя и на резисторах R1, R2, R3. Является безынерционным звеном с коэффициентом передачи равным 1. Суммирование осуществляется по алгоритму  .
.
Таблица 1
Исходные данные для процесса резания
| В, мм | D , мм | Инструментальный материал | Обрабатываемый материал | V , м/мин | SZ , мм/зуб | t П , мм | ||
| max | min | |||||||
| 150 | 200 | ВК8 | Сталь углеродистая σВ=750МПа | 120 | 0,05 | 1,2 | 0,8 | |
Паспортные данные двигателя.
Тип 2ПН180LУХЛ4
Номинальная мощность, Рн = 10 кВт;
Номинальное напряжение, Uн = 440 В;
Частота вращения номинальная nн = 1000 об/мин;
Частота вращения максимальная nм = 2500 об/мин
КПД, h = 83,5 %;
Сопротивление обмотки якоря, Rя = 0.585 Ом;
Индуктивность якоря, Lя = 20 мГн;
Момент инерции двигателя, Jн = 0.0495 кг/м2.
Преобразователь энергии (ПЭ): Т1= 0,193 с., Т2=0,170с.
Датчик (ДУ): Тду=0,0 с.
Передаточное устройство (ПУ): Тпу=0,0 с.
Составим функциональную схему САР на основании рис. 2.
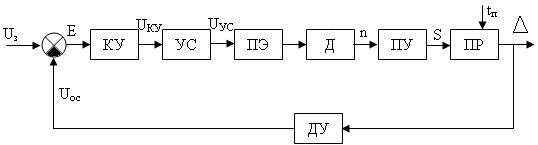
Рисунок 2. Функциональная схема САР.
|
из
5.00
|
Обсуждение в статье: Задание на курсовую работу |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы