 |
Главная |


Реализация следящей системы
|
из
5.00
|
Для того чтоб динамическая погрешность была равна 0 (XΩ = 0" Xε = 0") в системе необходимо реализовать звено  . Для этого понадобится тахогенератор. Выберем асинхронный тахогенератор АТ-3Б
. Для этого понадобится тахогенератор. Выберем асинхронный тахогенератор АТ-3Б  [3.299].
[3.299].
 ;
;
 ;
;
 ;
;
 .
.
Так как в системе регулирования используется электрический сигнал в виде напряжения переменного тока, а корректирующие устройства, построенные на усилителях, предполагают напряжение постоянного тока, то воспользуемся модулированным сигналом. В системах с модулированным сигналом в большинстве случаев оказывается более простым использование обычных звеньев, предназначенных для работы с модулированным сигналом, путем установки в канале управления фазочувствительного демодулятора ФД, фильтра Ф, отсеивающего высшие гармоники, последовательного звена ПЗ и, вслучае необходимости, модулятора М для обратного перехода к модулированному сигналу (рис. 3). Эти звенья могут быть как активными, так и пассивными. Мы будем использовать активные звенья, то есть звенья, построенные на операционных усилителях.
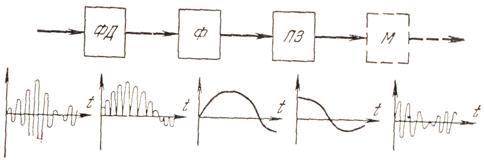
Рисунок 3 «Установка последовательного звена в канале с модулированным сигналом».
Такой путь, однако, может привести к серьезному ухудшению динамических свойств системы из-за введения в усилительный канал фильтра, являющегося дополнительной инерционностью. Это особенно заметно при использовании сравнительно низких значений несущей частоты (f = 10 - 50 Гц). Лучшие результаты получаются здесь для несущих частот f= 400 ~ 1000 Гц и выше.
Фильтры и демодуляторы установим на выходах тахогенератора и измерителя рассогласования. Модулятор понадобится один. Он должен быть установлен на выходе усилителя.
Заключение
В результате проектирования следящей системы автоматического регулирования, была создана система, удовлетворяющая заранее заданным требованиям в части точности и основных динамических свойств. Задача решалась таким образом, чтобы необходимые качественные показатели системы автоматического регулирования достигались наиболее простым путем, т. е. оптимальным методом синтеза по заданным качественным показателям. Основные свойства проектируемого канала управления:
Погрешность Xmax =40"
Показатель колебательности системы М=1.5
Время переходного процесса tпп =0.01 с
Для достижения требуемой точности используется система комбинированного управления, устойчивость достигается путем введения в канал ошибки последовательного корректирующего звена. Данная система обеспечивает заданную точность и имеет запас устойчивости по амплитуде 10.5 дБ и по фазе 22°.
Список литературы
1. Проектирование следящих систем. Основы проектирования следящих систем; под ред. Н.А.Лакоты. - М, Машиностроение, 1978.-350 с.
2. Проектирование следящих систем; под ред. Л.В.Рабиновича. - М, Машиностроение, 1969. – 256 с.
3. Справочник по электрическим машинам; под ред. И.П.Копылова, Т2. - М, Энергоатомиздат. - 1989. – 688 с.
4. В.И.Смирнова; Проектирование и расчет автоматизированных приводов, учебник для средних специальных учебных заведений. - М, Машиностроение, 1990. – 362 с.
5. В.И.Смирнова; Проектирование и расчет автоматизированных приводов, учебник для средних специальных учебных заведений. - М, Машиностроение, 1983. – 382 с.
6. В.А. Ганэ, В.Л. Степанов; Расчёт следящих систем. - Минск, ВШ,1990. – 227 с.
Приложение 1(ЛАЧХ и ЛФЧХ разомкнутой системы)

Приложение 2(Влияние редуктора на следящую систему)
Приложение3 (желаемые ЛАЧХ и ЛФЧХ разомкнутой системы)

Приложение 4 (Переходная характеристика)
Приложение 5 (Структурная схема)

Приложение 5 (Электрическая схема)

|
из
5.00
|
Обсуждение в статье: Реализация следящей системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы