 |
Главная |


Выбор электродвигателя, кинематический и силовой расчет
|
из
5.00
|
Оглавление
1.Техническое задание
2.Введение
3.Выбор электродвигателя , кинематический и силовой расчёт привода
4.Расчёт зубчатой передачи редуктора
5.Проектировочный расчёт валов редуктора
6.Конструктивные размеры зубчатой пары
7. Конструктивные размеры корпуса и крышки редуктора
8. Первый этап компоновки редуктора
9. Расчёт ременной передачи
10 Подбор шпонок и проверочный расчёт шпоночных соединений
11.Второй этап эскизной компоновки редуктора
12. Подбор подшипников для валов редуктора
13.Проверочный расчёт валов редуктора
14.Смазка зацепления и подшипников  редуктора. Выбор сорта масла и его количества
редуктора. Выбор сорта масла и его количества
15. Сборка редуктора
16.Список литературы
17.Оглавление
Введение
Редуктором называют механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины. Кинематическая схема привода может включать, помимо редуктора, открытые зубчатые передачи, цепные или ременные передачи. Указанные механизмы являются наиболее распространенной тематикой курсового проектирования.
Назначение редуктора - понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим. Механизмы для повышения угловой скорости, выполненные в виде отдельных агрегатов, называют ускорителями или мультипликаторами.
Редуктор состоит из корпуса (литого чугунного или сварного стального), в котором помещают элементы передачи — зубчатые колеса, валы, подшипники и т.д. В отдельных случаях в корпусе редуктора размещают также устройства для смазывания зацеплений и подшипников (например, внутри корпуса редуктора может быть помещен шестеренный масляный насос) или устройства для охлаждения (например, змеевик с охлаждающей водой в корпусе червячного редуктора).
Редуктор проектируют либо для привода определенной машины, либо по заданной нагрузке (моменту на выходном валу) и передаточному числу без указания конкретного назначения. Второй случай характерен для специализированных заводов, на которых организовано серийное производство редукторов.
Кинематические схемы и общие виды наиболее распространенных типов редукторов представлены на рис. 1 - 3. На кинематических схемах буквой Б обозначен входной (быстроходный) вал редуктора, буквой Т - выходной (тихоходный).
Редукторы классифицируют по следующим основным признакам: типу передачи (зубчатые, червячные или зубчаточервячные); числу ступеней (одноступенчатые, двухступенчатые и т.д.); типу зубчатых колес (цилиндрические, конические, коническо-цилиндрические и т.д.); относительному расположению валов редуктора в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развернутая, соосная, с раздвоенной ступенью и т.д.).
Возможности получения больших передаточных чисел при малых габаритах обеспечивают планетарные и волновые редукторы.
Одноступенчатые цилиндрические редукторы.
Из редукторов рассматриваемого типа наиболее распространены горизонтальные (рис.1). Вертикальный одноступенчатый редуктор показан на рис. 2. Как горизонтальные, так и вертикальные редукторы могут иметь колеса с прямыми, косыми или шевронными зубьями. Корпуса чаще выполняют литыми чугунными, реже — сварными стальными. При серийном производстве целесообразно применять литые корпуса. При серийном производстве целесообразно применять

Рис. 1. Одноступенчатый горизонтальный редуктор с цилиндрическими зубчатыми колесами; а — кинематическая схема; б — общий вид редуктора с косозубыми колесами
литые корпуса. Валы монтируют на подшипниках качения или скольжения. Последние обычно применяют в тяжелых редукторах.
Максимальное передаточное число одноступенчатого цилиндрического
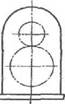
Рис. 2. Одноступенчатый вертикальный редуктор с цилиндрическими колесами: а — кинематическая схема; 6 —- общий вид

Рис.3. Сопоставление габаритов одноступенчатого и двухступенчатого
редукторов с цилиндрическими колесами при одинаковом передаточном числе и = 8,5 редуктора по ГОСТ 2185—66 umax = 12,5. Высота одноступенчатого редуктора с таким или близким к нему передаточным числом больше, чем двухступенчатого с тем же значением и (рис. 3). Поэтому практически редукторы с передаточными числами, близкими к максимальным, применяют редко, ограничиваясь и < 6. Ново-Краматорский машиностроительный завод (НКМЗ) выпускает крупные (межосевые расстояния aw = 300 - 1000 мм) одноступенчатые горизонтальные редукторы с и = 2,53 - 8,0.
Выбор горизонтальной или вертикальной схемы для редукторов всех типов обусловлен удобством общей компоновки привода (относительным расположением двигатели и рабочего вала приводимой) в движение машины и т.д.
Тяговая сила цепи F = 2,5 кН
Скорость перемещения смеси V = 1,5 м/сек
Наружный диаметр шнека D=450 мм
Допустимое отклонение скорости смеси δ = 5 %
Срок службы привода – 4 года
Тип редуктора 
Выбор электродвигателя, кинематический и силовой расчет
Определяем требуемую мощность электродвигателя:


где 
 КПД зубчатой передачи
КПД зубчатой передачи
 КПД ременной передачи
КПД ременной передачи
 коэффициент, учитывающий потери пары подшипников качения
коэффициент, учитывающий потери пары подшипников качения
Значения КПД передачи:
 ([1], таблица 1.1)
([1], таблица 1.1)

По требуемой мощности выбираем электродвигатель 3-х фазный, коротко замкнутый, в серии 4А, закрытый, обдуваемый, с синхронной частотой вращения:
Электродвигатель 4Аl32S4 с номинальной мощностью 5,5 кВт и номинальной частотой вращения  об/мин
об/мин
Общее передаточное отношение привода: 
Принимаем передаточное число редуктора:  ([1], страница 36)
([1], страница 36)
Передаточное число ременной передачи: 
Частота вращения ведущего вала редуктора:  об/мин
об/мин
Угловая скорость ведущего вала редуктора: 
Угловая скорость ведущего вала электродвигателя: 
Угловая скорость ведомого вала редуктора:

Вращающие моменты:


Выведем все расчеты в таблицу:
| I | II | III | |
| P, кВт | 4,19 | 3,75 | |
| n, об/мин | 1455 | 375 | 150 |
T, 
| 27,51 | 101,63 | 238,9 |
 рад/с рад/с
| 152,3 | 39,3 | 15,7 |
|
из
5.00
|
Обсуждение в статье: Выбор электродвигателя, кинематический и силовой расчет |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы