 |
Главная |


Предварительная настройка регулятора скорости
|
из
5.00
|
Расчет основных параметров и коэффициентов, необходимых для моделирования
По варианту выбираем двигатель постоянного тока с независимым возбуждением (ДПТ НВ) 2ПФ200МГУХЛ4; номинальная мощность РН=22 кВт; номинальное напряжение UН=220 В. Паспортные данные двигателя:
Номинальное значение скорости вращения двигателя: 
Максимальное значение скорости вращения двигателя: 
КПД: 
Сопротивление обмотки якоря при температуре 150С: 
Сопротивление обмотки дополнительных полюсов при температуре 150С: 
Индуктивность двигателя: 
Момент инерции двигателя: 
Номинальный ток двигателя:

Номинальная угловая скорость двигателя:

Сопротивление двигателя в горячем состоянии:

Коэффициент ЭДС и электромагнитного момента при номинальном потоке возбуждения:

Постоянная времени якорной цепи:

1.3.Расчет момента инерции механической системы и канала обратной связи
Эквивалентный момент инерции электромеханической системы:

Коэффициент усиления в канале обратной связи:

1.4. Расчет силового преобразователя
Коэффициент передачи преобразователя:
 .
.
Предварительная настройка регулятора скорости
Расчет П-регулятора
За показатель качества, который мы будем обеспечивать в электромеханической системе, примем относительное перерегулирование: 
Принимаем пропорциональную (П) структуру регулятора.
Коэффициент пропорциональной части примем: kР=1.
На рисунке 3 представлена структурная схема электромеханической системы с П-регулятором и силовым преобразователем, описанным как пропорциональное звено.

Рисунок 3 – Структурная схема электромеханической системы с П-регулятором и силовым преобразователем, описанным как пропорциональное звено
Имитационная модель электромеханической системы в программной среде MATLAB Simulink приведена на рисунке 4.

Рисунок 4 – Имитационная модель электромеханической системы

Рисунок 5 – Переходный процесс скорости вала двигателя электромеханической системы без фильтра на входе при единичном входном воздействии
Как видно из рисунка, переходный процесс скорости имеет большое перерегулирование:

Для его уменьшения установим на вход системы апериодический фильтр первого порядка с постоянной времени:

Данная величина постоянной  принята для обеспечения перерегулирования по скорости не более 5 %.
принята для обеспечения перерегулирования по скорости не более 5 %.
Имитационная модель электромеханической системы с фильтром на входе приведена на рисунке 6.
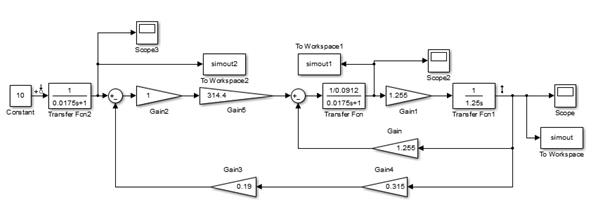
Рисунок 6 – Имитационная модель электромеханической системы с апериодическим фильтром на входе

Рисунок 7 – Переходный процесс скорости вала двигателя электромеханической системы с фильтром на входе при единичном входном воздействии
Как видно из рисунка, переходный процесс скорости имеет перерегулирование:

Для дальнейшего сравнения снимем также графики тока якоря ДПТ НВ, выходного напряжения входного фильтра и представим корневую плоскость динамической системы.
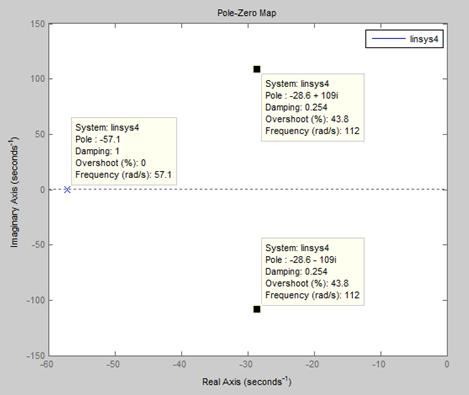
Рисунок 8 – Корневая плоскость системы

Рисунок 9 – Переходный процесс скорости двигателя электромеханической системы с фильтром на входе

Рисунок 10 – Переходный процесс тока якоря двигателя электромеханической системы с фильтром на входе

Рисунок 11 – Переходный процесс выходного напряжения входного фильтра электромеханической системы
|
из
5.00
|
Обсуждение в статье: Предварительная настройка регулятора скорости |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы