 |
Главная |


Структурно-кинематический анализ станка и настройка движений станка
|
из
5.00
|
Построим структурную схему компоновки станка, основываясь на кинематической схеме станка (рисунок 5), с изображением взаимного расположения режущего инструмента и заготовки в процессе обработки. На схеме (рисунок 7) обозначены все элементарные движения исполнительных органов станков.
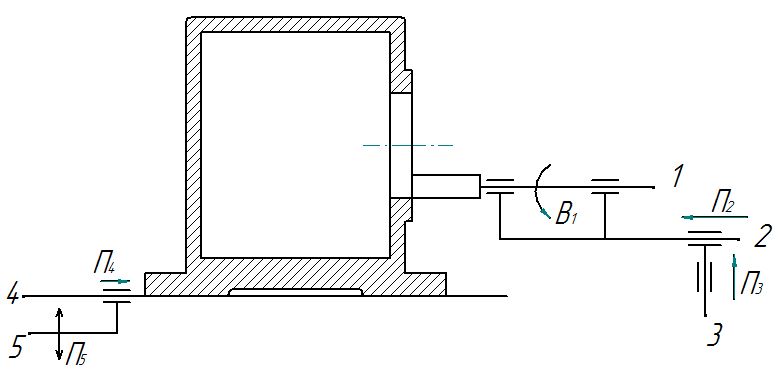
Рисунок 7 – Структурная схема компоновки станка
Элементарные движения, реализуемые в станке:
В1 – вращение шпинделя с режущим инструментом;
П2 – осевое перемещение шпинделя;
П3 – поступательное вертикальное перемещение шпиндельной бабки;
П4 –продольная подача стола;
П5 – поперечная подача стола;
Определение исполнительных движений.
Формообразующие движения:
На рисунке 8 а, б представлена схема образования винтовой канавки и режущей поверхности.

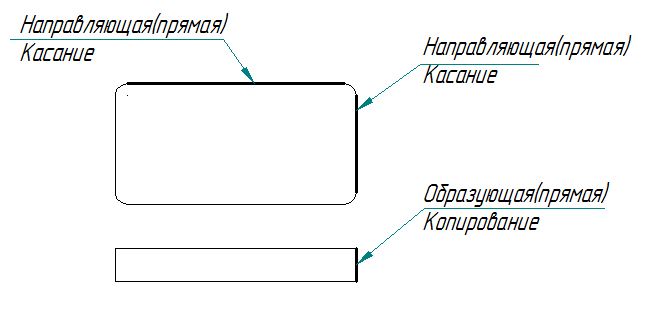
a б
Рисунок 8 - Методы получения производящих линий
Так как метод копирования не требует формообразующего движения, то для образования обрабатываемой поверхности необходимо три формообразующих движения:
Фv (В1) – вращение фрезы, для получения направляющей на рисунке 8а.
Фs1 (П3) - поступательное движение шпиндельной бабки, для получения направляющей на рисунке 8б.
Фs2 (П5) - поступательное движение стола, для получения направляющей на рисунке 8б.
Установочные движения:
Уст(П3) – поступательное перемещение шпиндельной бабки
Вр(П5) – поперечное перемещение стола
Вспомогательные движения:
Всп(П2) – ускоренное выдвижение шпинделя (отвод/подвод инструмента);
Всп(П4) – ускоренное продольное перемещение стола (отвод/подвод инструмента);
Настройка параметров движений
Фv(В1) – движение простое, траектория замкнутая, следовательно, настраиваем N,V.
Фs(П3) – движение простое, траектория не замкнутая, следовательно, настраиваем N,V,L,K.
Фs(П5) – движение простое, траектория не замкнутая, следовательно, настраиваем N,V,L,K.
Уст(П3) – движение простое, траектория не замкнутая, осуществляется вручную. Настраиваем L,K.
Вр(П5) – движение простое, траектория не замкнутая, осуществляется вручную. Настраиваем L,K.
Всп(П2) – движение простое, траектория не замкнутая, осуществляется с помощью дополнительного двигателя. Настраиваем L,K,N, скорость равна скорости холостого хода, подлежит расчету.
Всп(П4) – движение простое, траектория не замкнутая, осуществляется с помощью дополнительного двигателя. Настраиваем L,K,N, скорость равна скорости холостого хода, подлежит расчету.
Структурная схема станка
Структурная схема станка при обработке кармана на станке 262Г, изображена на рисунке 8.
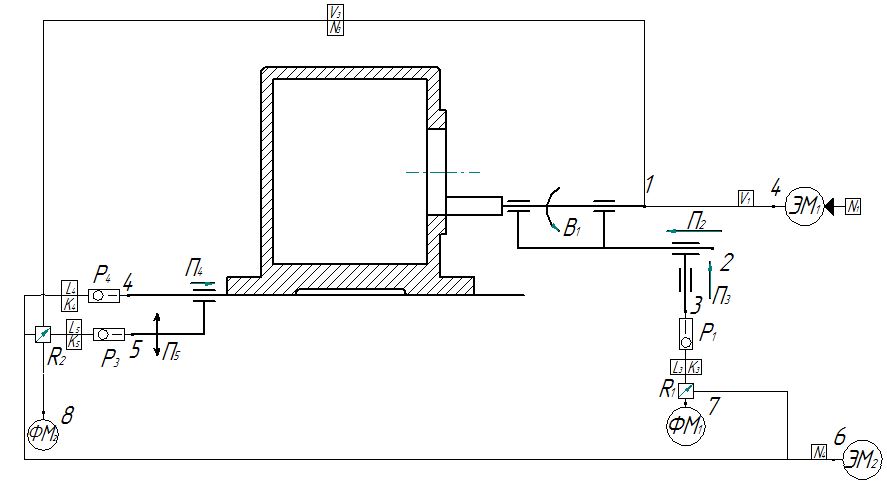
Рисунок 8 – структурная схема станка 262Г
|
из
5.00
|
Обсуждение в статье: Структурно-кинематический анализ станка и настройка движений станка |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы