 |
Главная |


Настройка параметров исполнительных движений
|
из
5.00
|
Формообразующие движение:
ФV(В1), V [м/мин]
Внутренняя связь: «Шпиндель - подшипники»
Внешняя связь: N1 -ЭМ1 – 4 – V1 – 1.
Число возможных способов передать вращение шпинделю от двигателя: Z= 2*1*3*2*2*1=24
| V1 |
Уравнение баланса
nдв→nинст
P4 – 1 ∙iV1= 
где nинст – частота вращения инструмента, P4 – 1 - постоянные передаточные отношения между точками 1 и 4, iV1 – передаточное отношение органа настройки скорости, V – скорость резания, dинст - диаметр режущей поверхности фрезы.
iV1 = iкс * nдв
где iкс - передаточное отношение коробки скоростей, nдв – частота вращения двигателя
∙ 
0,333∙ iV1=796,18
iV1=2390,93
Принимаем: iкс  nдв
nдв 
iV1 ф= iкс∙ nдв = 
iV1 ф – фактическое передаточное отношение органа настройки скорости.
Найдем погрешность настройки органа настройки скорости:

Погрешность для настройки скорости не превышает 10-15%, следовательно, настройки верны.
| N11 |
Настройка направления осуществляется реверсом электродвигателя.
ФS(П5), S мм/об. заг
Внутренняя связь: «Ползун - направляющие»
Внешняя связь: 1- V3-N3-R2-L5-K5 –Р3 - 5
| V3 |
- настроим скорость подачи.

Где P1-5 –постоянные передаточные отношения между точками 1 и 5, iv3 – передаточное отношение органа настройки скорости, состоящее из iкп – передаточного отношения коробки подач.


Примем:

Фактическое передаточное отношение органа настройки скорости:

Найдем погрешность настройки органа настройки скорости:

Погрешность для настройки скорости не превышает 10-15%, следовательно, настройки верны.
В результате фактическая подача:

| L5 K5 |
К2 – начальная точка
Установим инструмент в точку А (центр кармана).
L2 – путь, который проходит инструмент, что отображено на рисунке 9.
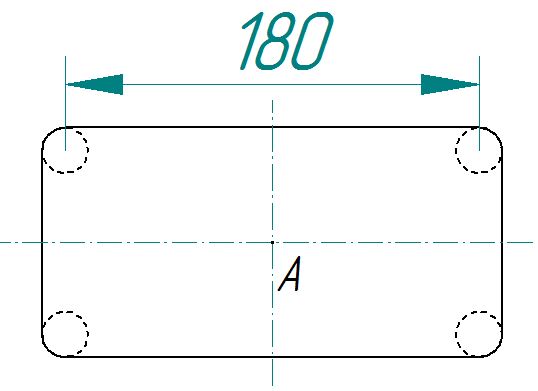
Рисунок 9 – Определение пути формообразующего движения
L2 = 180 мм
Контроль будет производится по лимбу рукоятки Р5, которая видна на кинематической схеме станка (рисунок 5).
Найдем число оборотов лимба:
nЛ×  1× 6=180
1× 6=180
nЛ=30 об.
| N3 |
Настройка направления осуществляется коническим трензелем
ФS(П3), S мм/об. заг
Внутренняя связь: «Ползун - направляющие»
Внешняя связь: 1- V3-N3-R2-R1-L3-K3 –Р1 - 3
| V3 |
- настроим скорость подачи.
Где P1-3 –постоянные передаточные отношения между точками 1 и 3, iv3 – передаточное отношение органа настройки скорости, состоящее из iкп – передаточного отношения коробки подач.

Примем:
Фактическое передаточное отношение органа настройки скорости:
Найдем погрешность настройки органа настройки скорости:
Погрешность для настройки скорости не превышает 10-15%, следовательно, настройки верны.
В результате фактическая подача:

| L3 K3 |
К3 – начальная точка
Установим инструмент в точку А (центр кармана).
L3 – путь, который проходит инструмент, что отображено на рисунке 10.
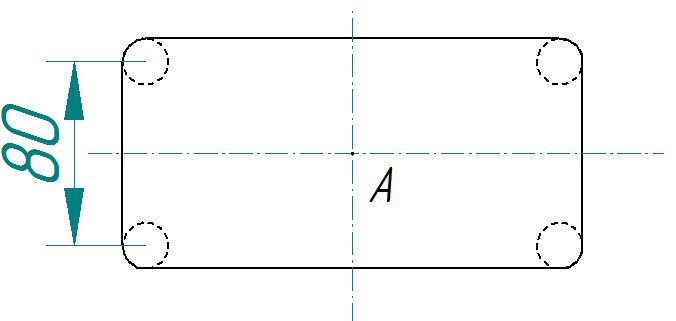
Рисунок 10 – Определение пути формообразующего движения
L3 = 80 мм
Контроль будет производится по лимбу рукоятки Р3, которая видна на кинематической схеме станка (рисунок 5).
Найдем число оборотов лимба:
nЛ×  ×2×8=80
×2×8=80
, где  – постоянное передаточное отношение между лимбом и винтом-гайкой.
– постоянное передаточное отношение между лимбом и винтом-гайкой.
nЛ=13,3 об.
| N3 |
Настройка направления осуществляется коническим трензелем
Настройка параметров установочных движений:
Уст (П3)
Внутренняя связь: «Ползун - направляющая»
Внешняя связь: ФМ1 – 7 – R1 – L3 – K3 – P1 – 3
| L3 K3 |
Настроим путь и начальную точку движения П3.
Вращая рукоятку Р3, подводим предварительно закреплённый в патроне гладкий валик до касания с пластинкой концевой меры (рисунок 11) и ставим лимб на ноль.
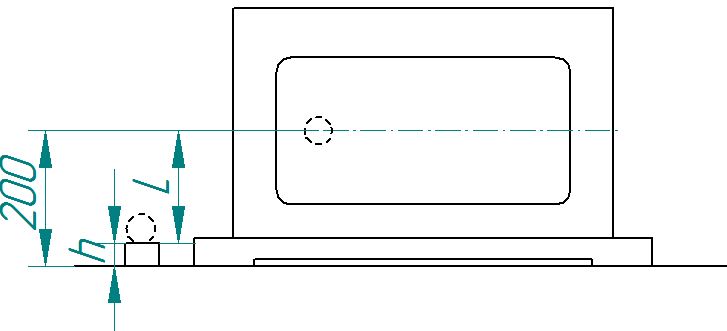
Рисунок 11 - Определение начальной точки установочного движения
Путь будет контролироваться визуально по лимбу 1, который находится на ручке ФМ1, на структурной схеме станка. С лимба 1 вращение передается преобразователю движения – винту-гайке, и уравнение баланса будет иметь вид:


h=6 мм – пластинка концевой меры


nоб.л= 32.3 об.
Вращая рукоятку Р5, подводим предварительно закреплённый в патроне гладкий валик до касания с пластинкой концевой меры (рисунок 12) и ставим лимб на ноль.
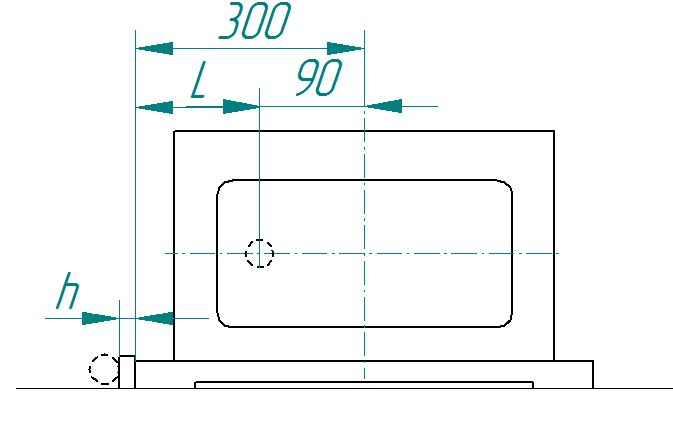
Рисунок 12 - Определение начальной точки установочного движения
Путь будет контролироваться визуально по лимбу 1, который находится на ручке ФМ1, на структурной схеме станка. С лимба 1 вращение передается преобразователю движения – винту-гайке, и уравнение баланса будет иметь вид:

h=6 мм – пластинка концевой меры



nоб.л= 36 об.
Вр(П5)
Внутренняя связь: «Ползун – направляющая»
Внешняя связь: ФМ2 – 8 – L5 – K5 – P3 – 5;
| V3 |
- настроим скорость движения врезания

Где P1-5 –постоянные передаточные отношения между точками 1 и 5, iv3 – передаточное отношение органа настройки скорости, состоящее из iкп – передаточного отношения коробки подач.



Примем:

Фактическое передаточное отношение органа настройки скорости:
Найдем погрешность настройки органа настройки скорости:

Погрешность для настройки скорости не превышает 10-15%, следовательно, настройки верны.
В результате фактическая подача:

| L6 K6 |
Начальной точкой движения врезания будет конечная точка установочного движения П3 (точка А на рисунке 13). Установим лимб на 0.
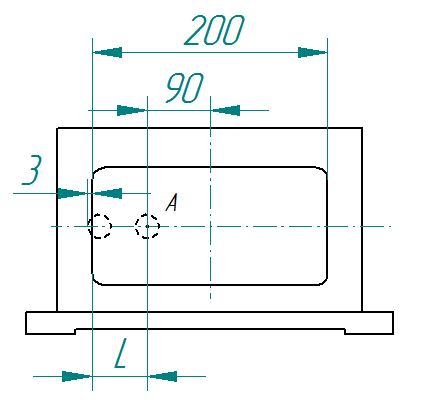
Рисунок 13 – Путь движения врезания
Путь будет контролироваться визуально по лимбу 2, который находится на ручке ФМ2, на структурной схеме станка. С лимба 2 вращение передается напрямую преобразователю движения – винту-гайке, и уравнение баланса будет иметь вид:
h=6 мм – пластинка концевой меры
nоб.л= 36 об.
Настройка вспомогательных движений:
Всп (П4)
Внутренняя связь: «П-Н»
Внешняя связь: ЭМ3 – 13 – N3 – R2 – L3 – K3– P2 – 3.
Рассчитаем скорость холостого хода VxxП6.
nдв2. →VxxП5

| L3 K3 |
Список литературы:
1. Металлорежущие станки : Рабочая программа, методические указания и контрольные задания/ Составитель В.В.Иванцивский, Рецензент Ю.С. Чесов – Новосибирск. Издательство НГТУ, 2003.22с.
2. Каталог Mitsubishi Materials
3. А.М. Кучер, М.М. Киватицкий, А.А. Покровский. Металлорежущие станки. – Л.: Машиностроение, 1971. 306 с.
|
из
5.00
|
Обсуждение в статье: Настройка параметров исполнительных движений |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы