 |
Главная |


КОНТРОЛЛЕР МАШИНИСТА ТИПА КМЭ-13
|
из
5.00
|
Назначение: контроллер машиниста служит для дистанционного управления тяговыми двигателями.
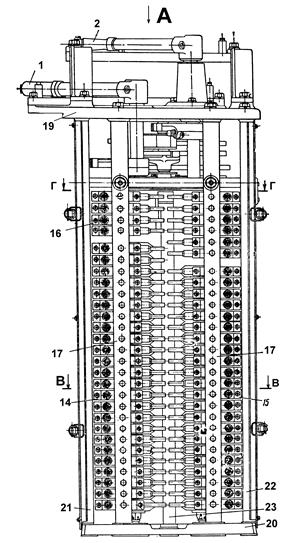
Основные элементы: каркас (рисунок 87), главный, тормозной и реверсивно-селективный валы, контакторные элементы, приводной механизм рукояток, зубчатые секторы и рукоятки, и механические блокировки.
Каркас: основание 20, верхняя крышка 19 и средняя рама 24, соединённые с вертикальными стойками 17,18, 21 и 22 болтами. Каркас закрыт двумя крышками, одна из которых съемная.
| обозначения на рисунках 87 – 90:
1 – главная рукоятка; 2 – тормозная рукоятка; 3 – реверсивно-селективная рукоятка; 4 – главный вал; 5 – тормозной вал; 6,7 – полушайбы реверсивно-селективного вала; 8,9 – зубчатые секторы 10,11 – вспомогательные валы; 12,13 – шестерни главного и тормозного валов; 14,15 – кулачковые элементы главного и тормозного валов; 16 – кулачковые элементы реверсивно-селективных валов 17,18,21,22 – стойки каркаса; 19 – литая крышка; 20 – литое основание; 24 – средняя рама; 25 – кулак; 26 – винтовые упоры; 27 – гнездо для реверсивно-селективной рукоятки; 28,29 – полые реверсивно-селективные валы.

|
Рисунок 87 Контроллер машиниста КМЭ-13.
Главный (левый) 4 и тормозной (правый) 5 валы (рисунок 88) расположены между основанием и средней рамой в подшипниках. На верхние концы валов насажены шестерни 12 и 13, входящие в зацепление с зубчатыми секторами 8 и 9 вспомогательных валов. По всей длине валов напрессованы профильные изоляционные кулачковые шайбы (на рисунке 75 не показаны).
|
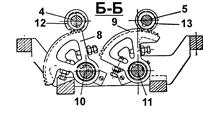
 Реверсивно-селективный вал. На главный 4 (рисунок 89) и тормозной 5 валы напрессованы шарикоподшипники, а на них наружные кольца - два полых реверсивно-селективных вала 29 и 28. На обоих полых валах закреплены изоляционные профильные полушайбы 6 и 1, и зубатые секторы 8 и 9 (рисунок 90), входящие в зацепление друг с другом. Один из валов имеет гнездо 27 для реверсивно-селективной рукоятки.
Реверсивно-селективный вал. На главный 4 (рисунок 89) и тормозной 5 валы напрессованы шарикоподшипники, а на них наружные кольца - два полых реверсивно-селективных вала 29 и 28. На обоих полых валах закреплены изоляционные профильные полушайбы 6 и 1, и зубатые секторы 8 и 9 (рисунок 90), входящие в зацепление друг с другом. Один из валов имеет гнездо 27 для реверсивно-селективной рукоятки.
 Реверсивно-селективный вал имеет 8 положений:
Реверсивно-селективный вал имеет 8 положений:
0 – нулевое. Соответствует отключенному состоянию цепей тяговых двигателей электровоза;
 М – моторный. Для пуска и разгона электровоза на последовательно-паралелльном и параллельном соединениях тяговых электродвигателей при движении «вперед» и «назад» в тяговом режиме;
М – моторный. Для пуска и разгона электровоза на последовательно-паралелльном и параллельном соединениях тяговых электродвигателей при движении «вперед» и «назад» в тяговом режиме;
МС – моторный сериесный. Для пуска и разгона электровоза на последовательном соединении тяговых электродвигателей при движении «вперед» и «назад» в тяговом режиме;
 П, СП и С – для рекуперативного торможения при движении электровоза «вперед» на параллельном, последовательно-параллельном и последовательном соединении тяговых двигателей.
П, СП и С – для рекуперативного торможения при движении электровоза «вперед» на параллельном, последовательно-параллельном и последовательном соединении тяговых двигателей.
Контакторный элемент (КЭ) 16 (рисунок 89). Состоит из изоляционного основания. На нем закреплен неподвижный контакт в виде болта и имеется гнездо для притирающей пружины со штифтом. На один конец штифта опирается пружина, а второй конец заходит в прорезь подвижного контакта. Подвижный контакт со стороны, противоположной штифту, имеет ролик. Со своей клеммой (болтом) соединён медным шунтом. Элемент приводится в действие кулачковой шайбой главного и тормозного валов или полушайбой реверсивно-селективного вала, когда ролик КЭ перекатывается по малому радиусу кулачковой шайбы. КЭ закреплены винтами к вертикальным стойкам каркаса.
Приводной механизм рукояток. Состоит из двух вспомогательных валов 10 и 11 (рисунок 90), расположенных между крышкой и средней рамой. Концы валов выводят наружу крышки и на концы крепятся главная 1 и тормозная 2 рукоятки. На валы ниже рукояток свободно одеваются зубчатые секторы 8 и 9 и при помощи штифтов закрепляются кулаки 25, головки которых заходят в секторы и располагаются между их винтовыми упорами 26.
При перемещении любой из рукояток, вращается ее вспомогательный вал, кулак нажимает на винтовой упор зубчатого сектора, сектор через шестерню вращает главный или тормозной вал.
Зубчатые секторы и рукоятки. Главная и тормозная рукоятки имеют зубчатые рейки по числу позиций. Рукоятки имеют фиксаторы, западающие в пазы секторов. Главная рукоятка имеет дополнительный фиксатор с пружиной для перевода её с реостатных позиций на ходовую позицию.
Механические блокировки устанавливают в зависимости между положениями рукояток, исключая ошибочные действия машиниста:
• главная рукоятка не может быть установлена на позиции, до установки реверсивно-селективной рукоятки в одно из рабочих положений. Эта блокировка, блокирует контроллер и исключает поворот ПкР, ПкТ и ПкС под током.
• главная рукоятка не переводится с 21 на 22 позицию, если реверсивно-селективная рукоятка находится в положении «Вперед-МС». Блокировка исключает переключение тяговых электродвигателей из «С» сразу же в «П» соединение.
• тормозная рукоятка не переводится на позиции ОП до установки главной на ходовую позиций. Блокировка исключает реостатный пуск электровоза в режиме ослабления возбуждения.
• тормозная рукоятка не устанавливается на позицию 02 до установки реверсивно-селективной рукоятки на одну из позиций «С», «СП» или «П» рекуперативного торможения и тормозная рукоятка не переводится далее позиции 02 до установки главной рукоятки на 1 позицию. Обе блокировки обеспечивают последовательность сбора схемы рекуперации.
Действие контроллера: при переводе главной или тормозной рукоятки по своим позициям вращаются их вспомогательные валы, вращается кулак, и давит на один из винтовых упоров, поворачивая зубчатый сектор, сектор через малую шестерню поворачивает соответствующий вал, вал при вращении своими кулачковыми шайбами переключает свои контакторные элементы.
|
из
5.00
|
Обсуждение в статье: КОНТРОЛЛЕР МАШИНИСТА ТИПА КМЭ-13 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы