 |
Главная |


Создание оперативной навигационной точки USER WPT
|
из
5.00
|
Оперативная навигационная точка может быть обозначена идентификатором длиной до 5 символов и может быть задана несколькими способами:
- по географическим широте и долготе;
- по радиалу и дистанции от известной точки, включая текущую позицию;
- по радиалам от двух известных навигационных точек;
- захват и сохранение текущей позиции как оперативной навигационной точки.
Для создания оперативной навигационной точки по географическим координатам необходимо:
- находясь на странице "USER WAYPOINTS",нажатием на малую правую рукоятку активировать курсор;
- используя малую и большую правые рукоятки, ввести идентификатор новой навигационной точки;
- нажать "ENT", подтверждая выбор;
- в поле географических координат появляются координаты текущей позиции. Если текущая позиция и является создаваемой точкой, необходимо высветить - нажать "ENT", подтверждая выбор;
- если создаваемая точка имеет другие координаты, вращать большую правую рукоятку для того, чтобы поместить курсор в окно географических координат;
- вращая малую и большую правые рукоятки, набрать желаемые координаты;
- нажать "ENT", подтверждая выбор. Курсор передвинется на "CREATE?";
- нажать "ENT", занося новую навигационную точку в память;
- нажать малую правую рукоятку для удаления курсора со страницы.

Для создания оперативной навигационной точки по радиалу и дистанции от известной точки необходимо:
- находясь на странице "USER WAYPOINTS", нажатием на малую
правую рукоятку активировать курсор;
- используя малую и большую правые рукоятки, ввести
идентификатор создаваемой навигационной точки;
- ввести имя в память, нажав "ENT";
- вращая большую правую рукоятку, перевести курсор на поле
"REF WPT";
- используя малую и большую правые рукоятки, набрать
идентификатор известной точки, относительно которой определяются
координаты создаваемой точки;
- нажать "ENT", подтверждая выбор, курсор передвинется на поле
"RAD";
- используя малую и большую правые рукоятки, набрать радиал от
известной точки;
- нажать "ENT" для подтверждения, курсор передвинется на поле
"DIS";
- используя малую и большую правые рукоятки, набрать дистанцию от
известной точки;
- нажать "ENT" для подтверждения;
- вращая большую правую рукоятку, высветить "CREATE ?" и нажать
"ENT";
- нажав правую малую рукоятку, удалить курсор со страницы.
В качестве известной точки может быть выбрана текущая позиция. В
этом случае вместо набора имени известной точки необходимо нажать "CLR" ,
чтобы в поле "REF WPT" появилось"P.POS", далее действовать в соответствии с
предыдущим алгоритмом.

Создание оперативной навигационной точки по радиалам от двух
Известных точек.
Алгоритм практически совпадает с 8.17.1.6.1.2, за исключением того, что
после выбора радиала от первой известной точки, с помощью большой правой
рукоятки необходимо передвинуть курсор в поле "REF WPT" второй известной
точки, далее необходимо:
- используя малую и большую правые рукоятки, набрать имя 2-й
известной точки и подтвердить "ENT", курсор передвинется в поле "RAD" 2-й
известной точки;
- используя малую и большую правые рукоятки, набрать радиал от 2-й
навигационной точки, подтвердить его нажатием "ENT"; -вращая большую правую рукоятку, высветить "CREATE ?" и нажать "ENT"; - нажать малую правую рукоятку для удаления курсора со страницы.

Для захвата и сохранения текущей позиции в качестве оперативной
навигационной точки необходимо:
- находясь на странице "MAP", нажать малую правую рукоятку. В этом
случае на карте появится метка текущей позиции;
- нажать "ENT" и на появившейся странице "USER WAYPOINTS" в
верхнем окне будет набрано 4-х цифровое имя создаваемой навигационной
точки;
- с помощью малой и большой правых рукояток изменить имя по
своему желанию, подтвердив нажатием "ENT";
- большой правой рукояткой переместить курсор на "CREATE ?";
- нажав "ENT", занести в память новую навигационную точку.

Модификация существующей оперативной навигационной точки:
Алгоритм модификации оперативной навигационной точки практически
тот же, что и алгоритм создания навигационной точки:
- находясь на странице "USER WAYPOINTS", набрать в верхнем поле
идентификатор навигационной точки, которую необходимо модифицировать;
- в соответствии с алгоритмом создания навигационной точки
изменить координаты;
- вращая большую правую рукоятку, переместить курсор на " MODIFY?";
- нажать "ENT" для подтверждения модификации навигационной точки.

ФЛАЙТ- ПЛАН.
GNC-420 позволяет создать 20 флайт- планов с 31 поворотным пунктом в
каждом из них.
Создание нового флайт- плана.
Для создание нового флайт- плана необходимо:
- нажать клавишу "FPL" и вращать малую правую рукоятку до
появления каталога флайт- планов;
- нажать "MENU" и, вращая большую правую рукоятку, установить
курсор на строке "CREATE NEW FLIGHT PLAN ?", нажать "ENT" для перехода к
странице "FLIGHT PLAN";
- используя малую и большую правые рукоятки, ввести имя пункта
вылета. подтвердить нажатием "ENT";
- для последовательного ввода поворотных пунктов маршрута
повторить предыдущее действие необходимое число раз;
- по окончании ввода флайт- плана нажать малую правую рукоятку для возврата к каталогу флайт- планов.






Редактирование флайт- плана.
Для редактирования флайт-плана необходимо:
- нажать "FPL" и вращать малую правую рукоятку до появления
страницы “FLIGHT PLAN CATALOG”;
- нажать малую правую рукоятку, чтобы активировать курсор;
- вращать большую правую рукоятку, чтобы установить курсор на
желаемый флайт-план и нажать "ENT";
- для введения дополнительного поворотного пункта вращать большую
правую рукоятку до поворотного пункта, стоящего после дополнительного;
- использовать большую и малую правые рукоятки, для выбора
идентификатора нового поворотного пункта, нажать "ENT";
- для вывода поворотного пункта из флайт- плана вращать большую
правую рукоятку до поворотного пункта, который необходимо убрать, нажать
"CLR" и "ENT", подтвердив вопросительное "YES ?".
См. рисунки Создание нового флайт- плана.
Навигация по флайт- плану.
Для активирования желаемого флайт-плана необходимо:
- нажать клавишу "FPL" и, вращая малую правую рукоятку, перейти к
странице “FLIGHT PLAN CATALOG”;
- нажать малую правую рукоятку, чтобы активизировать курсор;
- выбрать желаемый флайт- план, вращая большую правую рукоятку;
- нажать клавишу "MENU" и, вращая большую правую рукоятку,
установить курсор на строке "ACTIVATE FLIGHT PLAN ?";
- нажать "ENT", при этом выбранный флайт- план индицируется на
странице “FLIGHT PLAN”;
- нажать клавишу "FPL" и, вращая большую и малую рукоятку,
перейти к основной навигационной странице “DEFAULT NAV” или к странице
“MAP” для осуществления навигации по активированному флайт- плану.
После выполнения полёта по выбранному флайт- плану его можно
инвертировать для полёта в обратном направлении. Для этого необходимо;
- нажать клавишу "FPL";
- нажать клавишу "MENU" и, вращая большую правую рукоятку,
установить курсор на строке “Invert Flight Plan”, нажать "ENT";
- перейти на основную навигационную страницу.







Уничтожение флайт- плана.
Для уничтожения флайт-плана необходимо:
- нажать "FPL" и вращать малую правую рукоятку, до появления
страницы “FLIGHT PLAN CATALOG”;
- активизировать курсор и, вращая большую правую рукоятку,
выбрать флайт-план;
- нажать клавишу "MENU" и, вращая большую правую рукоятку,
установить курсор на строке "DELETE FLIGHT PLAN?";
- нажать "ENT" и подтвердить выбор ”Yes?” нажатием "ENT".


При выполнении полета по маршруту с помощью GNS 420,
можно воспользоваться группой навигационных страниц:
- Страница NAV по умолчанию;
- Страница MAP;
- Страница NAVCOM;
- Страница положения;
- Страница состояния спутников; -
1. Страница NAV по умолчанию.

Имеется возможность изменить значение полей, для этого необходимо: - нажать кнопку меню; - установить курсор на строке Change Fields? - нажать кнопку ENT. - большой правой ручкой выбрать поле которое необходимо заменить; - малой правой ручкой выбрать новое значение поля; - нажать кнопку ENT. - для завершения операции нажать малую правую ручку. -Однако, каждое из этих полей может быть определено по вашему предпочтению
| · Пеленг на ППМ (BRG) | ||
| · Дальность до точки назначения (DIS) | ||
| · Безопасная высота на маршруте (ESA) | ||
| · Расчетное время в пути (ETE) | ||
| ·
| ||
| · Фактический путевой угол (TRK) | ||
| · Боковое отклонение от курса (ЛБУ) (XTK) | ||
| · Курс наведения (CTS) | ||
| · Заданный путевой угол (DTK) | ||
| · Расчетное время прибытия (ЕТА) | ||
| · Путевая скорость (GS) | ||
| · Разница ЗПУ и ФПУ (∆ ПУ ) (TKE) | ||
| · Требуемая вертикальная скорость (VSR) |



2. Страница MAP.

Имеется возможность изменить значение полей, для этого необходимо: - нажать кнопку меню; - установить курсор на строке Change Fields? - нажать кнопку ENT. - большой правой ручкой выбрать поле которое необходимо заменить; - малой правой ручкой выбрать новое значение поля; - нажать кнопку ENT. - для завершения операции нажать малую правую ручку



3. Страница NAVCOM.

Эта страница обеспечивает списком частот аэропортов прибытия, на маршруте и отправления, с удобным выбором частот, которые вам необходимы. Если у вас нет активного плана полета с аэропортом отправления, на странице NAVCOM будут индицироваться частоты аэропорта, ближайшего к местоположению вашего отправления.
1. Нажать на малую правую ручку для активации курсора.
2.Поворачивайте большую правую ручку для перемещения курсора на поле идентификатора аэропорта (верхняя строка на странице NAVCOM).
3.Поворачивайте малую правую ручку для выбора требуемого аэропорта и нажмите ENT.
4. Страница положения.
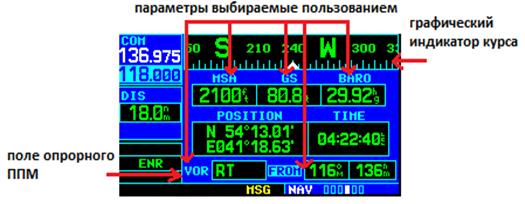
Графический индикатор ПУ вверху страницы указывает направление, по которому вы двигаетесь, или ПУ, только во время вашего движения. Прямо под ним находятся три поля. Выбираемых пользователем, которые по умолчанию индицируют курс, путевую скорость и высоту.
Барометрическое давление(BARO) и минимальная безопасная высота (MSA) могут также индицироваться на этих полях. MSA является минимальной рекомендованной высотой внутри 10-мильной зоны от Вашего настоящего положения. MSA вычисляется по информации, содержащейся в базе данных и, в основном, включает горы, строения и другие постоянные объекты.
Имеется возможность изменить значение полей, для этого необходимо: - нажать кнопку меню; - установить курсор на строке Change Fields? - нажать кнопку ENT. - большой правой ручкой выбрать поле которое необходимо заменить; - малой правой ручкой выбрать новое значение поля; - нажать кнопку ENT. - для завершения операции нажать малую правую ручку.
5. Страница состояния спутников.
|


6.
Страница VNAV
Страница вертикальной навигации (последняя навигационная страница) позволит вам создать трехмерный профиль, который будет руководить вашим движением от вашего текущего положения и высоты к конечной цели с определенной высотой и местоположением. Это полезно, когда вы хотите снизится до определенной высоты вблизи аэропорта или подняться на некоторую высоту прежде чем достигните высоты маршрута или точки назначения. После того, как профиль ВНАВ определен, появится сообщение и дополнительные данные на навигационной странице и странице карты будут информировать вас о полете.

 Для создания профиля вертикальной навигации:
Для создания профиля вертикальной навигации:
1. Нажмите на малую правую ручку для активизации курсора
2. Поворачивайте большую правую ручку для выделения поля высоты цели.
3. Поворачивайте малую и большую правую ручки для выбора высоты цели и нажмите ENT.
4. Поворачивайте малую правую ручку для выбора “Above Wpt” или “MSL” и нажмите ENT.“Above Wpt” будет использовать высоту аэропорта назначения, хранимую в базе данных Jeppesen на картридже NavData. “MSL” позволит вам выбрать определенную высоту цели для любой категории ППМ: аэропорт, VOR, NDB, пересечение или пользовательский ППМ.
5. Поворачивайте малую правую ручку для выбора дальности до цели от опорного ППМ цели и нажмите ENT.Если высота цели появится на опорном ППМ цели введите дальность ноль.
6. Поворачивайте малую правую ручку для выбора “Before” или “After” цели и нажмите ENT.
Эта установка назначается всегда, когда координаты профиля определяют точку до то достижения опорного ППМ цели или после того. как вы достигните ППМ.
7. При использовании плана полета опорный ППМ цели может быть определен из ППМ, содержащихся в плане полета. По умолчанию, будет выбран последний ППМ в плане полета Для выбора другого ППМ поворачивайте малую правую ручку для выбора требуемого ППМ и нажмите кнопку ENT.
8. По умолчанию профиль использует скорость снижения 400 футов в минуту
(»2.03 м/сек). Чтобы изменить скорость поворачивайте большую правую ручку для выделения поля “VS Profile” и используйте малую и большую правые ручки для ввода новой скорости. Нажмите ENTпо окончании.
Список литературы.
- РЛЭ ЯК-18т 36 серии
- РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ “GARMIN GNS 430”
|
из
5.00
|
Обсуждение в статье: Создание оперативной навигационной точки USER WPT |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы