 |
Главная |


Теория машин и механизмов
|
из
5.00
|
234. Проекция силы  на ось Ох:
на ось Ох:
1)  ; 2)
; 2)  ; 3)
; 3)  ;
;
4)  .
.
235. Момент силы  относительно оси у равен:
относительно оси у равен:
 |
1)
 ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  ; 5)
; 5)  ; 6)
; 6)  .
.
236. Результирующая (  ) системы сил
) системы сил  :
:

1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  .
.
237. Главным моментом пространственной системы сил  , приведенной к центру О, называют:
, приведенной к центру О, называют:
 ; 2)
; 2)  ;
;  ; 4)
; 4)  .
.
238. Представленная система уравнений  является условием равновесия:
является условием равновесия:
1) пространственной системы произвольно расположенных сил; 2) пространственной системы параллельных сил; 3) пространственной системы сходящихся сил; 4) плоской системы произвольно расположенных сил.
|

|

|
 :
:
1) векторному; 2) координатному; 3) естественному; 4) любому.
240. Нормальное ускорение точки  характеризует изменение скорости:
характеризует изменение скорости:
 |
1) по модулю; 2) по направлению; 3) по модулю и направлению; 4) векторное.
241. Для точки М тела, вращающегося вокруг неподвижной оси, модуль скорости:
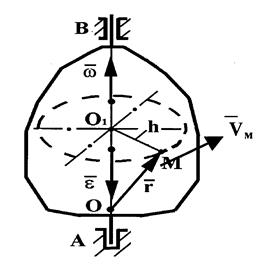
1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  ; 5)
; 5)  .
.
242. Звенья гусеницы трактора на участке ВС относительно земли совершают движение:
1) поступательное; 2) вращательное; 3) неподвижны; 4) общий случай плоскопараллельного.
243. Колесо радиуса R катится без скольжения по плоскости. Мгновенный центр скоростей находится:
1) в точке О; 2) в точке M1; 3) в точке М2; 4) в точке М3.
244. Точка массой m движется под действием сил  с ускорением
с ускорением  . Основным уравнением динамики является:
. Основным уравнением динамики является:
1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  .
.
245. Теорему о движении центра масс механической системы выражает дифференциальное уравнение:
1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  .
.
246. Платформа массой М движется со скоростью  , по этой платформе с относительной скоростью
, по этой платформе с относительной скоростью  движется тележка массой
движется тележка массой  . Проекция на ось х количества движения системы, состоящей из платформы и тележки:
. Проекция на ось х количества движения системы, состоящей из платформы и тележки:

1)  ; 2)
; 2)  ;
;
3)  ; 4)
; 4)  ;
;
5)  .
.
247. Тело совершает вращение вокруг оси  . Известны момент инерции тела относительно оси вращения Jz и внешние силы (в том числе реакции опор), действующие на тело,
. Известны момент инерции тела относительно оси вращения Jz и внешние силы (в том числе реакции опор), действующие на тело,  . Равномерное вращение тела описывается уравнением:
. Равномерное вращение тела описывается уравнением: 
1)  ; 2)
; 2)  ; 3)
; 3)  ;
;
4)  ; 5)
; 5)  ,
,
где i = 1, 2,…, n.
248. Тело массой и моментом инерции относительно оси, проходящей через центр масс Jc, под действием внешних сил  совершает плоскопараллельное движение. Уравнениями движения тела являются:
совершает плоскопараллельное движение. Уравнениями движения тела являются:
1)  ; 2)
; 2)  ;
;
3)  ; 4)
; 4)  ,
,
где i = 1, 2,…, n.
249. Для расчета кинетической энергии второго звена представленного механизма используется формула:
1) 

 .
.
250. Теорема об изменении кинетической энергии (Т1-Т0) неизменяемой системы записывается в виде:
1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  ,
,
где  - соответственно сумма работ внешних и внутренних сил, приложенных к точкам системы, на рассматриваемом перемещении.
- соответственно сумма работ внешних и внутренних сил, приложенных к точкам системы, на рассматриваемом перемещении.
251. Работа силы тяжести падающего тела вычисляется по формуле:
1)  2)
2)  3)
3)  4)
4)  .
.
252. Дифференциальные уравнения Лагранжа для движения системы в обобщенных координатах имеют вид:
1)  ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4)  ,
,
где  .
.
 253. Данная механическая система представляет собой:
253. Данная механическая система представляет собой:
1) кинематическую цепь; 2) ферму; 3) механизм; 4) группу Асура.
254. В механизме качающегося конвейера имеется кинематических пар:
1) четыре; 2) пять; 3) шесть; 4) семь.
255. Шатуном механизма сеноворошилки является звено под номером:
1) 1; 2) 2; 3) 3; 4) 4.
256. Задан график скорости ползуна v = v(t). Максимальное перемещение наблюдается в момент времени t =:
1) 0; 2) 2; 3) 3; 4) 4.
257. Кинетостатический расчёт механизма основан на принципе, изучаемом в теоретической механике:
1) возможных перемещений; 2) Даламбера; 3) сохранения кинетической энергии; 4) сохранения количества движения.
258. Силовой расчёт структурных групп механизма ведут в такой последовательности:
1) в порядке присоединения групп Асура к исходному механизму; 2) с группы, наиболее удалённой от ведущего звена; 3) со звена, к которому приложена сила полезного сопротивления; 4) с группы, наиболее приближенной к ведущему звену.
259. Сила, определяемая по методу жёсткого рычага Н. Е. Жуковского, является силой:
1) движущей; 2) полезного сопротивления; 3) уравновешивающей; 4) тормозящей.
260. Приведённый момент Ммр какой-либо силы определяется по условию:
1) равенства мгновенных мощностей; 2) равенства кинетических энергий; 3) равенства сил; 4) равенства масс.
|
из
5.00
|
Обсуждение в статье: Теория машин и механизмов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы