 |
Главная |


ДИАПАЗОН ВЫСОТ И СКОРОСТЕЙ ПОЛЕТА
|
из
5.00
|
Кривые потребной и располагаемой мощностей впервые были предложены Н.Е. Жуковским для определения летных характеристик летательных аппаратов, и в аэродинамике носят его имя (рис.2.3.)

Рис.2.3. Кривые Жуковского
Метод одновременного рассмотрения изменения потребной и располагаемой мощностей в зависимости от различных эксплуатационных факторов позволяет раскрыть физическую сущность причин изменения возможных условий горизонтального полета, выявить его наиболее характерные скорости и режимы.
На рис.2.3. можно видеть следующие характерные точки:
- точка 1-  =0, минимальная скорость горизонтального полета, соответствует режиму висения. На данной высоте при
=0, минимальная скорость горизонтального полета, соответствует режиму висения. На данной высоте при  =0 имеется запас мощности, поэтому возможны висение и вертикальный подъем;
=0 имеется запас мощности, поэтому возможны висение и вертикальный подъем;
- точка 2- точка минимальной  определяет экономическую скорость полета (
определяет экономическую скорость полета (  ), при этом запас мощности максимальный;
), при этом запас мощности максимальный;
- точка 3- определяет  – скорость наибольшей дальности полета;
– скорость наибольшей дальности полета;
- точка 4- точка пересечения  и на больших скоростях полета определяет максимальную скорость горизонтального полета, которая достигается при полном использовании располагаемой мощности.
и на больших скоростях полета определяет максимальную скорость горизонтального полета, которая достигается при полном использовании располагаемой мощности.
Изменение располагаемой и потребной мощностей в зависимости от высоты, температуры наружного воздуха и полетной массы вертолета определяет изменение перечисленных скоростей горизонтального полета.
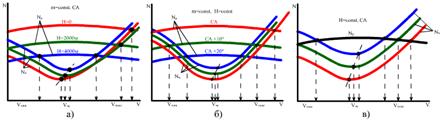
Рис. 2.4. Влияние эксплуатационных факторов полета на
кривые Жуковского
Располагаемая мощность изменяется в соответствии с высотно-климатической характеристикой силовой установки при ее работе на взлетном режиме.
С увеличением высот полета кривая потребной мощности вначале сдвигается вверх и вправо, что обуславливается увеличением индуктивной мощности при одновременном уменьшении мощности движения. Сдвиг происходит примерно по касательной, проведенной из начала координат к кривой потребной мощности для  =0. Однако для высот более 2,5-3км кривая потребной мощности отходит от этой касательной вверх, т.к. на больших высотах вследствие влияния сжимаемости воздуха резко увеличивается профильная мощность.
=0. Однако для высот более 2,5-3км кривая потребной мощности отходит от этой касательной вверх, т.к. на больших высотах вследствие влияния сжимаемости воздуха резко увеличивается профильная мощность.
Увеличение температуры наружного воздуха и полетной массы вертолета приводит к росту индуктивной и профильной мощности, практически не изменяя мощность движения.
Под режимом горизонтального полета понимается установившееся прямолинейное движение вертолета с постоянной скоростью без набора высоты и снижения.
В практической аэродинамике вертолета различают следующие основные характерные скорости горизонтального полета: минимальную, экономическую, крейсерскую и максимальную.
Максимальная и минимальная скорости горизонтального полета по высотам определяют теоретический диапазон возможных скоростей и высот полета (рис.2.4.).
Минимальная скорость полета – это наименьшая скорость, на которой вертолет еще удерживается в горизонтальном полете на данной высоте при использовании взлетного режима работы двигателей. До =0, на больших высотах для висения не хватает располагаемой мощности, поэтому горизонтальный полет возможен только на поступательной скорости, т.е. когда несущий винт переходит на косую обдувку и возможности его по созданию тяги при взлетной мощности двигателей увеличиваются.

Рис.2.5. Теоретический и эксплуатационный диапазон
высот и скоростей полета
При полете на минимальной скорости на высотах выше статического потолка отсутствуют запасы мощности силовой установки и, как правило, очень малы запасы по путевому управлению, а также ограничено время работы двигателей. Наблюдается повышенный уровень тряски, возможны самопроизвольные движения вертолета.
Максимальная скорость полета – это наибольшая скорость установившегося горизонтального полета при использовании максимальной (взлетной) мощности двигателей. Максимальная скорость горизонтального полета ограничена располагаемой мощностью, т.к. при по полете на этих скоростях располагаемая мощность меньше потребной и вертолет не может увеличить скорость из-за отсутствия запаса мощности. Для вертолетов характерна и другая причина ограничения максимальной скорости полета – по срыву потока с лопастей несущего винта. С увеличением скорости и высоты полета растет потребное значение  и на отступающих лопастях (
и на отступающих лопастях (  =270-3000) вследствие увеличения скорости взмаха вниз и работы регулятора взмаха местные углы атаки становятся закритическими. В этом секторе образуется зона срыва потока, которая с увеличением скорости полета расширяется.
=270-3000) вследствие увеличения скорости взмаха вниз и работы регулятора взмаха местные углы атаки становятся закритическими. В этом секторе образуется зона срыва потока, которая с увеличением скорости полета расширяется.
Теоретический диапазон высот и скоростей полета определяет динамический и статический потолок.
Динамический потолок  – это наибольшая высота полета, где минимальная скорость равна максимальной и нет избытка мощности. Практически достичь динамического потолка представляет определенную сложность, т.к. время набора этой высоты значительно превышает время работы двигателя на взлетном режиме и, кроме того, усложняется техника пилотирования в связи с близостью ограничений по срыву потока с лопастей несущего винта и отсутствием запаса мощности силовой установки.
– это наибольшая высота полета, где минимальная скорость равна максимальной и нет избытка мощности. Практически достичь динамического потолка представляет определенную сложность, т.к. время набора этой высоты значительно превышает время работы двигателя на взлетном режиме и, кроме того, усложняется техника пилотирования в связи с близостью ограничений по срыву потока с лопастей несущего винта и отсутствием запаса мощности силовой установки.
Статический потолок  – это максимальная высота висения вертолета с нормальной взлетной массой, в стандартных атмосферных условиях, вне зоны влияния земли, при работе двигателей на взлетном режиме.
– это максимальная высота висения вертолета с нормальной взлетной массой, в стандартных атмосферных условиях, вне зоны влияния земли, при работе двигателей на взлетном режиме.
С учетом изменения диапазона возможных скоростей и высот, и обеспечения безопасности полетов, Инструкцией экипажа предусмотрены максимальные и минимальные скорости полета по высотам для установившихся режимов полета, которые определяют эксплуатационный диапазон высот и скоростей полета (табл.1).
Таблица 1
| Высота, м. | При взлетной массе, кг | |||
| максимальная | минимальная | максимальная | минимальная | |
| До 1000 | ||||
| 1101 | 601 | 80(601) | ||
| 60002 | - | - | 1002 | 602 |
Примечание:
1.Цифры с индексом 1 – для вертолета Ми-8МТВ на высоте 4800м;
2.Цифры с индексом 2 – для вертолета Ми-8МТВ с нормальной взлетной массой.
|
из
5.00
|
Обсуждение в статье: ДИАПАЗОН ВЫСОТ И СКОРОСТЕЙ ПОЛЕТА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы