 |
Главная |


САМОВРАЩЕНИЯ НЕСУЩЕНГО ВИНТА
|
из
5.00
|
6.4.1. ПРИЗНАКИ
§ резкая разбалансировка вертолета, проявляющаяся как резкий рывок вправо. Величина разбалансировки зависит от скорости полета и режима работы двигателей (чем выше режим работы двигателей и меньше скорость полета, тем резче проявляется разбалансировка);
§ изменение звука от работающих двигателей;
§ быстрое падение оборотов несущего винта;
§ падение оборотов и температуры газов обоих двигателей.
6.4.2. ФИЗИЧЕСКАЯ СУЩНОСТЬ И УСЛОВИЯ
САМОВРАЩЕНИЯ НЕСУЩЕГО ВИНТА
Несущие винты современных вертолетов обладают свойством переходить на режим самовращения при выключении двигателей, развивая при этом достаточно большую тягу.
Поддержание оборотов НВ и создание его тяги в безмоторном полете происходит за счет расхода потенциальной энергии вертолета при уменьшении высоты полета. Это свойство НВ позволяет летчику на вертолете продолжать полет со снижением по наклонной траектории, выбрать площадку и произвести посадку.
В отличии от большинства режимов моторного полета НВ на РВСН работает при положительных углах атаки, т.е. поток набегает на НВ снизу. Физической основой свойства самовращения является образование на элементах лопастей подсасывающей силы, благодаря которой возможен наклон результирующей силы  вперед, так, что ее составляющая
вперед, так, что ее составляющая  направлена к носику профиля (рис 6.6.).
направлена к носику профиля (рис 6.6.).

Рис.6.6. Принцип образования подсасывающей силы
Это объясняет принципиальную возможность появления на элементе лопасти силы  (проекции ) совпадающей с окружной скоростью, как это показано на рис.6.7.
(проекции ) совпадающей с окружной скоростью, как это показано на рис.6.7.
На верхней поверхности у передней кромки элемента лопасти возникает пик разряжения. Вследствие этого разряжения проекция сил давления на хорду профиля оказывается направленной вперед, к носику элемента, и называется подсасывающей силой.
Это свойство наблюдается у несущих поверхностей с профилями, имеющими относительную толщину более 5-6%, которые применяются на лопастях НВ. Подсасывающая сила практически отсутствует у несущих поверхностей с тонкими профилями, особенно при заостренной передней кромке. Подсасывающая сила не реализуется также при сверхзвуковых скоростях движения. Различают ускоренное, замедленное и установившееся самовращение.
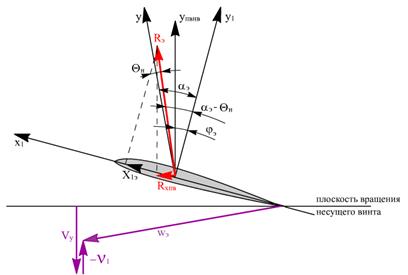
Рис.6.7. Принцип образования ускоряющей силы на элементе
лопасти при вертикальном снижении на РСНВ
При планировании на РСНВ вращение НВ должно обеспечить вращение РВ и других агрегатов, преодолевая при этом трение трансмиссии. При этом возникает так называемый увлекающий момент, который передается через вал винта на фюзеляж вертолета, и стремиться повернуть вертолет в сторону вращения НВ. Следовательно, по сравнению с моторным полетом на РВСН изменяется знак путевого момента от НВ. В связи с отсутствием передачи мощности (и крутящего момента) от силовой установки исчезает  , но появляется момент
, но появляется момент  , требующий для своего уравновешивания изменения направления тяги РВ на РВСН (вперед дается левая педаль).
, требующий для своего уравновешивания изменения направления тяги РВ на РВСН (вперед дается левая педаль).
При отказе двигателей основная задача, стоящая перед летчиком, заключается в том, чтобы немедленно перевести НВ на режим самовращения без существенной потери оборотов и высоты полета. Падение оборотов НВ является крайне нежелательным явлением, т.к. это приводит к большой потере высоты за время перехода на РСНВ и ухудшению управляемости. Последнее объясняется падением тяги НВ вследствие потери оборотов и как следствие уменьшение управляющего воздействия векторов тяги НВ и РВ относительно центра тяжести вертолета. Величина падения оборотов в значительной мере зависит от темпа уменьшения общего шага после выключения двигателей (рис.6.8.).

Рис.6.8. Зависимость величины падения оборотов НВ от темпа
уменьшения общего шага
Для уменьшения потери оборотов НВ применяются два способа перехода на РСНВ:
1-й способ заключается в сбросе общего шага до минимального. Этот способ применяют при выключении двигателей на малой скорости и больших высотах.
2-й способ применяется при выключении двигателей на малых высотах и больших скоростях полета (более 120км/ч). Он сводится к энергичному отклонению РУ на себя (увеличение тангажа до 200) и одновременному сбросу общего шага
Балансировка вертолета после отказа двигателей восстанавливается с помощью педалей и РУ: левая педаль – вперед, РУ несколько на себя и влево.
На рисунке 6.9.показана зависимость вертикальной скорости снижения на РСНВ приборной скорости полета.
На рис. 6.9. видны следующие характерные точки при снижении на РСНВ:
- точка 1 – режим парашютирования (вертикальной авторотации). Большая вертикальная скорость не может погаситься при подрыве до безопасной. На практике, как правило не применяется.
- точка 2 – режим минимально допустимой скорости планирования. Применяется при заходе на площадку, имеющую высокие препятствия. Угол наклона траектории при этом  =260. Дальнейшее уменьшение скорости планирования не рекомендуется, т.к. это приводит к
=260. Дальнейшее уменьшение скорости планирования не рекомендуется, т.к. это приводит к
- увеличению  и сопровождается срывами и вибрациями из-за больших углов атаки.
и сопровождается срывами и вибрациями из-за больших углов атаки.
- точка 3 – режим максимальной продолжительности полета. Является основным при заходе на посадку. =170.
- точка 4 – режим максимальной дальности планирования. Минимальный угол планирования =130. На этом режиме качество вертолета и НВ максимальное. Применяется в тех случаях, когда необходимо дотянуть до площадки. Дальность планирования определяется по формуле:  .
.
- точка 5 – режим максимально допустимой скорости планирования. Ограничен из-за условий срыва потока с корневых сечений отступающих лопастей при больших углах атаки. При этом, чем больше скорость планирования и меньше обороты, тем больше зона срыва.

Рис.6.9. Зависимость вертикальной скорости снижения на
РСНВ от приборной скорости полета
6.4.3. ПРИ ОТКАЗЕ ДВУХ ДВИГАТЕЛЕЙ НА ВЫСОТАХ
БОЛЕЕ 100м
- немедленно уменьшить общий шаг несущего винта до минимального;
- одновременно соответствующими отклонениями РУ и педалей удерживать вертолет от кренов и разворотов;
- перевести рычаги стоп-кранов двигателей в закрытое положение, дать команду бортовому технику «Закрыть пожарные краны, выключить подкачивающие и перекачивающие насосы»;
- разгоном или торможением установить приборную скорость планирования 100-120км/ч;
- обороты несущего винта выдерживать наибольшими в пределах 90-100% по указателю путем соответствующего отклонения рычага общего шага, не допуская забросов выше 110% и падения ниже 88%;
- произвести сброс внешних подвесок в целях уменьшения полетной массы;
- сбалансировать вертолет триммерами, создав незначительный пикирующий момент, а поперечным триммером полностью снять усилия от кренящего момента;
- выбрать площадку и выполнить заход на посадку по возможности против ветра;
- при наличии достаточной высоты расчет на посадку можно уточнять отклонением рычага общего шага не допуская выхода оборотов за допустимые пределы;
- на высоте 100-70м небольшими плавными отклонениями РУ установить и выдерживать постоянной приборную скорость 100км/ч для посадки с пробегом или 70км/ч – для посадки без пробега;
- с высоты 70-50м перевести взгляд на землю для визуального определения текущего значения высоты вертолета относительно площадки приземления, при этом РУ сохранять установившееся значение угла тангажа. Для облегчения летчику определения момента «подрыва» несущего винта бортовому технику начиная с высоты 50м производить отсчет текущего значения высоты по радиовысотомеру, сообщая по СПУ: «Пятьдесят, сорок, тридцать, двадцать»;
- с высоты 15-10м при выполнении посадки с пробегом и 20-15м без пробега увеличить общий шаг (произвести «подрыв» несущего винта за время не менее 1с) до 7-80 и выдерживать его в течение 0,5-1с. Если этого окажется недостаточно для уменьшения вертикальной скорости, увеличить общий шаг до 120 (за время 1-1,5с) соразмерно окончательному уменьшению вертикальной скорости;
- в процессе «подрыва» несущего винта с темпом 100/с увеличить угол тангажа вертолета до 5-60 для уменьшения поступательной скорости при выполнении посадки при выполнении посадки с пробегом и до 8-100 без пробега, удерживая вертолет на этом угле незначительным отклонением РУ от себя;
- после приземления установить общий шаг несущего винта 7-80 и выдерживать его постоянным до полной остановки вертолета на пробеге;
- отклонением РУ на себя выдерживать достигнутый угол тангажа при приземлении до момента, когда вертолет начнет самопроизвольно опускаться на носовое колесо. После этого РУ плавно отклонить от себя на  хода и применить тормоза колес.
хода и применить тормоза колес.
ПРИМЕЧАНИЕ:
1. Если выбранная для посадки площадка находится в стороне от направления полета или возникла необходимость изменить направление посадки по условиям направления ветра (при наличии достаточной высоты полета), следует выполнить необходимый маневр.
2. Для выполнения посадки на режиме самовращения несущего винта с разворотом на угол до 1800 (с креном 150) высота должна быть не менее 650м.
6.4.4. ПРИ ОТКАЗЕ ДВИГАТЕЛЕЙ НА ВЫСОТЕ 100м И МЕНЕЕ
- если скорость в момент отказа двигателей близка к 70км/ч, немедленно уменьшить общий шаг несущего винта до величины, обеспечивающей обороты несущего винта в пределах 90-100%. Перевести рычаги стоп-кранов двигателей в закрытое положение, установить скорость планирования 70км/ч для посадки с коротким пробегом или без пробега в соответствии с рекомендациями по выполнению «подрыва» несущего винта, торможения вертолета и приземления, приведенными для случая отказа двигателей на высотах более 100м. После останова на пробеге дать команду бортовому технику «Закрыть пожарные краны, выключить подкачивающие и перекачивающие насосы»;
- если скорость в момент отказа двигателей окажется больше 120км/ч, немедленно уменьшить общий шаг для обеспечения оборотов несущего винта не менее 88% с одновременным переходом на интенсивное торможение путем придания вертолету угла тангажа до 200 в зависимости от скорости и высоты полета (чем больше скорость и меньше высота, тем больше угол), на которых отказали двигатели. Увеличением общего шага не допускать превышения оборотов более 110%.
- перевести рычаги стоп-кранов двигателей в закрытое положение. Соответствующим отклонением рычагов управления устранить возникающие крен и разворот.
- если высота позволяет своевременно затормозить вертолет до скорости 70км/ч, необходимо сбалансировать вертолет на этой скорости и дальше действовать в соответствии с рекомендациями, указанными в тексте предыдущего тире. Если высота окажется недостаточной, то необходимо сохранять достигнутый угол тангажа до момента «подрыва» несущего винта на высоте 20-15м.
При необходимости дальнейшего гашения скорости планирования выполнить посадку с углом тангажа, при котором выполнялось торможение.
На висении при отказе обоих двигателей действия экипажа такие же, как и при отказе одного двигателя (ст.6.3.4.), но при этом следует учитывать, что разбалансировка вертолета в путевом отношении, уменьшение оборотов несущего винта и переход вертолета на снижение имеют более резко выраженный характер.
|
из
5.00
|
Обсуждение в статье: САМОВРАЩЕНИЯ НЕСУЩЕНГО ВИНТА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы