 |
Главная |


Показатели качества установившегося режима
|
из
5.00
|
Коэффициенты ошибок характеризуют точность работы САР в установившемся режиме. Для статической САР хорошего качества величина с0 должна находиться в пределах 0,01 – 0,1, для астатических САР с0 = 0. Коэффициенты с1 и с2 характеризуют скорости изменения сигнала задания, при которых ошибка слежения мала. Другими словами, эти коэффициенты характеризуют быстродействие САР в установившемся режиме работы и поэтому их величины напрямую не регламентируются.
Для определения коэффициента ошибки нужно подключить выход первого сумматора, сумматора главного контура управления, к осциллографу. При ступенчатом воздействии установившееся значение ошибки – это коэффициент с0, при линейно растущем воздействии (если с0 = 0) – это коэффициент с1.
Поскольку оптимизированная САР «ДПТ» является астатической, то ее коэффициент ошибки с0 = 0. Это косвенно видно по рис. 7.3.2. Для определения коэффициента ошибки по скорости с1, к входу САР нужно подключить генератор линейно растущего сигнала. Установившееся значение сигнала ошибки равно величине с1:
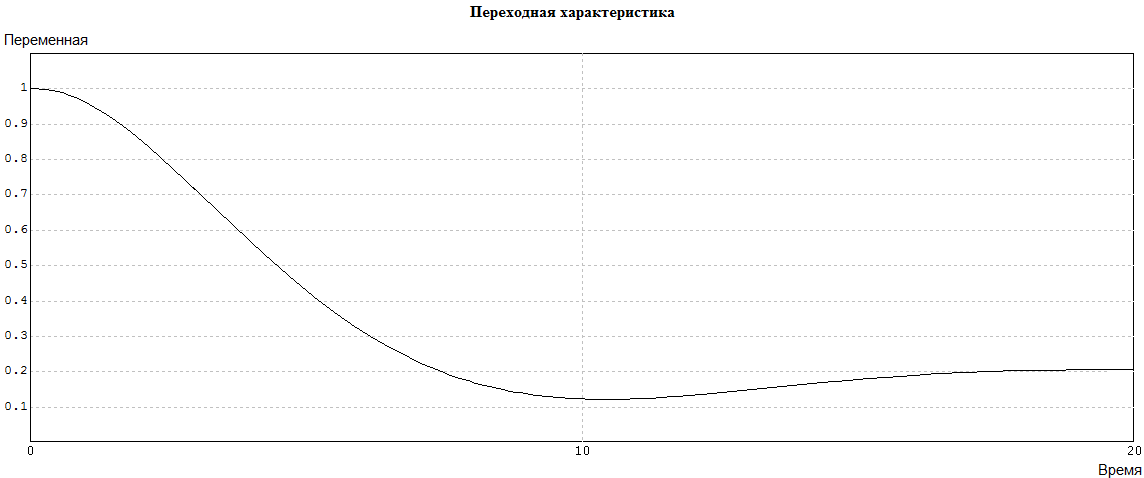
Рис. 8.2.1. Диаграмма для определения коэффициента ошибки по скорости астатической САР «ДПТ» С1=0,2
8.3 САР «ДПТ» в режиме слежения и стабилизации
Для проверки качества САР и в режиме слежения, и в режиме стабилизации следует одновременно подать на нее и ступенчатое задание, и ступенчатое возмущение. Этим воздействиям для наглядности переходной характеристики следует придать разные задержки.
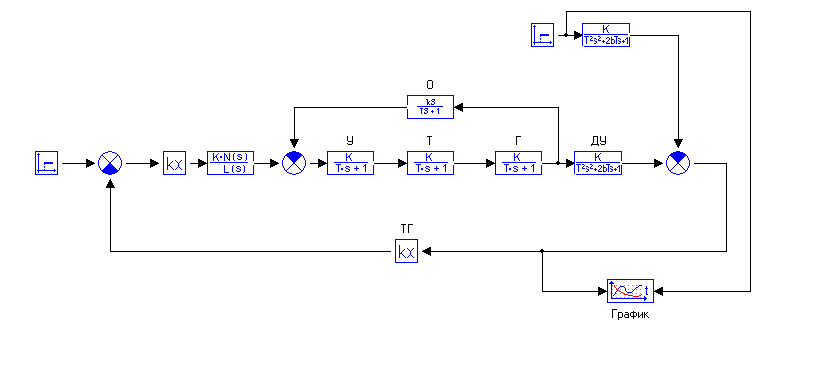
Рис. 8.3.1Схема с совокупным воздействием на САР «ДПТ»
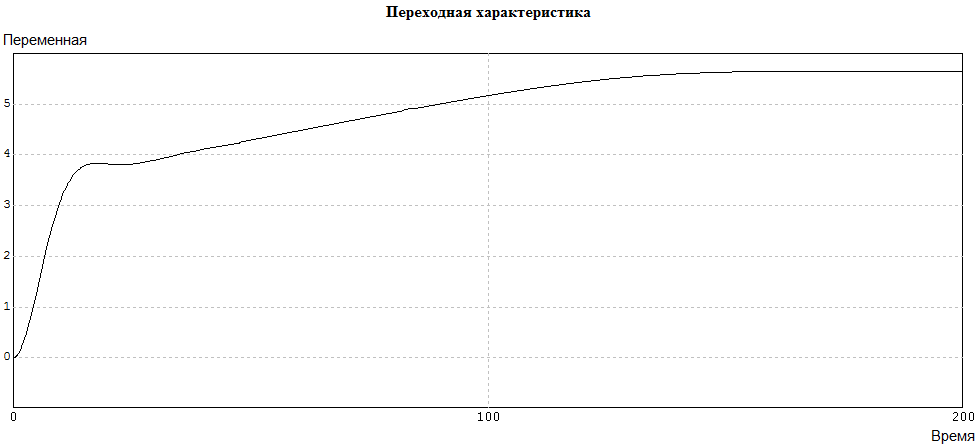
Рис. 8.3.2. Совокупное воздействие на САР «ДПТ» ступенчатых задания и возмущения.
По переходной характеристике видно, что САР компенсирует возмущение примерно за 10 с, с максимальной ошибкой в - 2 об/с при величине возмущения в 10 Н·м.
Поскольку в задании не задается требование к качеству компенсации возмущения, то будем считать полученное качество удовлетворительным. В противном случае потребуется скорректировать схему либо несколько увеличивая коэффициент усиления контура, либо повышая астатизм САР по возмущению, либо вводя компенсирующее устройство.
Список использованных источников:
1.Загинайлов В.И., Шеповалова Л.Н. Основы автоматики. – М.: Колос, 2001. – 199 с.
2. Шавров А.В., Коломиец А.П. Автоматика. – М.: Колос, 1999. – 264 с.
3.Сайт кафедры АТПП РИИ.
http://web.host.kz/atpp
или http://www.web.host.kz/atpp.
4.Федосов Б.Т. Задания и методические указания к выполнению курсовой работы по курсу ТАУ. Рудный, РИИ, 1996, - 32 с.
5.Федосов Б.Т. Оценка качества установившегося режима САР. 2003 г.
http://model.exponenta.ru/bt/bt_0004.html
6. Клиначев Н.В. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Учебно-методический комплекс
http://online.download.ru/Download/[ProgramID=11415] или
http://model.exponenta.ru/tau_knv.zip
файл tau_knv.zip 1439 KB, V3.4, 28.08.2004
8. Рожнов А. В., Симонов А.В. МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИк выполнению курсовой работы по дисциплине «АВТОМАТИКА»для студентов факультета электрификации и автоматизации сельского хозяйства (специальность 311400) Кострома, 2004
|
из
5.00
|
Обсуждение в статье: Показатели качества установившегося режима |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы