 |
Главная |


Радиолокационные индикаторы скорости
|
из
5.00
|
В начале 90-х гг. прошлого века на схему радиолокационному скоростимеру РИС-В2 было разработано новое поколение горочных измерителей РИС-В3. Отличительными их особенностями явились повышенная дальность действия, более широкий диапазон измеряемых скоростей, высокая точность, устойчивость к сильно флуктуирующим входным сигналам.
Последнее поколение горочных измерителей РИС-В3М реализовано с применением микропроцессорной элементной базы в каналах обработки сигналов.
Основные его технические характеристики: напряжение питания осуществляется от промышленной сети переменного тока 220 В (+ 10 %; - 15 %) частотой 50 Гц, диапазон рабочих температур от -40 °С до +60 °С; относительная влажность 95 % при +25 °С.
РИС-В3М стабильно работает в условиях воздействия вибрационных нагрузок в диапазоне частот от 10 до 70 Гц с ускорением до 3,8 g, а также сохраняет работоспособность в любых атмосферных условиях: дождь, туман, иней, роса.
Диапазон измеряемых скоростей РИС-В3М от 1,5 до 35 км/ч (что соответствует диапазону доплеровских частот от 105 до 2450 Гц). При необходимости программным путём диапазон измеряемых скоростей может быть расширен до диапазона 0,4 – 46 км/ч.
Коэффициент преобразования импульсного выходного сигнала, пропорционального скорости движения отцепа, с амплитудой 10 В±10 % на нагрузке сопротивлением  = 1,2 кОм±10 % составляет (70±1,4) Гц/км/ч.
= 1,2 кОм±10 % составляет (70±1,4) Гц/км/ч.
Начальный интервал времени измерения для оценки скорости при въезде отцепа в зону действия РИС-В3М и автоматического выбора рабочего интервала измерения (времени поиска и захвата сигнала) не более 0,12 с.
Время нахождения РИС-В3М в режиме памяти при пропадании входного сигнала – не более 2 с. Частота излучаемого сигнала – 37,5±1% ГГц. Мощность излучаемого сигнала горочных индикаторов скорости, как правило, составляет 10 – 20 мВт и не превышает 50 мВт. Излучение СВЧ сигнала антенной РИС-В3М не представляет опасности для эксплуатационного персонала при соблюдении правил эксплуатации, что подтверждено санитарно-гигиеническим сертификатом № 77.ФУ.02.401.П.001448.06.02,от 20.06.2002 г., выданным Государственной санитарно-эпидемиологической службой Российской Федерации.
Мощность, потребляемая РИС-В3М от сети, не более 25 Вт.
Потенциал РИС-В3М при отношении амплитуды сигнала к амплитуде шума, равном 2, в полосе частот 3 кГц от 50 до 75 дБ, что обеспечивает его дальность действия до 250 м.
В РИС-В3М предусмотрен канал контроля параметров («калибровка»), используемый для непрерывного контроля индикатора.
Габаритные размеры РИС-В3М: длина (продольный размер) – 480 мм; ширина (поперечный размер) – 220 мм; высота – 210 мм. Масса РИС-В3М не более 12 кг. В отличие от РИС-В3 он практически в два раза меньше по габаритам и весу.
Поворотное устройство на крепёжной стойке РИС-В3М обеспечивает изменение положения РИС-В3М в горизонтальной плоскости не менее чем на ±15°; в вертикальной – не менее чем на ±10°.
Кроме радиолокационной части, размещённой в герметизированном корпусе, в комплект РИС-В3М входят основание (поворотное устройство) и жгуты проводов для подсоединения к клеммам муфты.
Наиболее существенные отличия состоят в том, что в индикаторе впервые для класса радиолокационных горочных измерителей реализованы: режим непрерывного дистанционного контроля его работоспособности даже при отсутствии в зоне его действия отцепов; цифровой канал передачи информации по стандартному стыку RS-485; режим встроенного самотестирования и самодиагностики с адресным контролем параметров первичной настройки
и юстировки; режим адресного регулирования параметрами настройки и калибровки наиболее существенных параметров любого индикатора скорости с пульта оператора; режим селекции до трёх мешающих сигналов от соседних отцепов, попадающих в зону диаграммы направленности антенны.
В основу работы РИС-В3М положен эффект Доплера, состоящий в том, что при перемещении источника СВЧ-колебаний по отношению к наблюдателю и наоборот частота колебаний в месте наблюдения отличается от собственной частоты источника колебаний, причём приращение частоты пропорционально радиальной составляющей скорости движения.
Приращение частоты за счёт эффекта Доплера выражается формулой

где  – доплеровская частота;
– доплеровская частота;  – частота излучаемого сигнала;
– частота излучаемого сигнала;  – скорость движения объекта;
– скорость движения объекта;  – скорость света;
– скорость света;  – угол между направлением излучения и вектором скорости объекта.
– угол между направлением излучения и вектором скорости объекта.

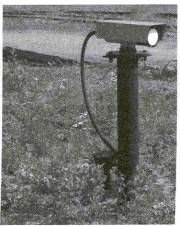
Схема электрическая функциональная РИС-В3М представлена на рис. 3.26, а на рис. 3.27 показан его внешний вид.
 Генерируемый приёмно-передающим модулем (далее ППМ) СВЧ-сигнал, излучается антенной в направлении движущегося объекта и этой же антенной принимается отраженный от объекта сигнал. Доплеровская частота выделяется ППМ и в виде гармонических колебаний поступает в блок обработки, где усиливается, фильтруется, преобразуется в цифровой вид, обрабатывается в цифровом виде, а затем вновь преобразуется в аналоговый вид и уже в форме меандра поступает на выход РИС-В3М.
Генерируемый приёмно-передающим модулем (далее ППМ) СВЧ-сигнал, излучается антенной в направлении движущегося объекта и этой же антенной принимается отраженный от объекта сигнал. Доплеровская частота выделяется ППМ и в виде гармонических колебаний поступает в блок обработки, где усиливается, фильтруется, преобразуется в цифровой вид, обрабатывается в цифровом виде, а затем вновь преобразуется в аналоговый вид и уже в форме меандра поступает на выход РИС-В3М.
Рис. 3.27 Внешний вид РИС-В3М
Передачу и приём СВЧ-радиосигнала частотой 37,5 ГГц через конструктивно совмещённую приёмо-передающую антенну 1 осуществляет ППМ 5 в ставе генератора СВЧ-сигнала 3, смесителя 4) и развязывающего ферритового модуля 2.
Работа ППМ основана на перемножении сигналов гетеродина 3 с отражённым сигналом, принятым антенной, и дальнейшим выделением на смесителе низкочастотной составляющей доплеровского сигнала с частотой, пропорциональной скорости движения вагона. ППМ выполнен в волноводном варианте на волноводе сечением 7,2  3,4 мм.
3,4 мм.
Рупорно-линзовая антенна 1 представляет собой гладкий конический рупор. Коэффициент усиления антенны более 30 дБ. Фокусирующая линза выполнена из радиопрозрачного материала – фторопласта 4.
Входным сигналом РИС-В3М является отражённый от отцепа и принятый антенной СВЧ-сигнал, имеющий фазовую задержку, пропорциональную скорости отцепа. Выходной сигнал РИС-В3М формируется на выходах усилителей 7 и 8 в виде двух импульсных, отрицательной полярности частотных сигналов F1 и F2, пропорциональных скорости отцепа, сдвинутых по фазе на 180° (формы меандра). Инверсию фазы сигнала в одном из
каналов проводит блок 11. наличие парафазного продублированного импульсного выхода позволяет создать симметричный канал, чем повышает помехоустойчивость сигнала в сложной помеховой обстановке.
Входной доплеровский сигнал поступает в усилитель- фильтр 6, который осуществляет усиление и фильтрацию сигнала, поступающего со смесителя в диапазоне частот 0 – 3200 Гц. Затем этот усиленный сигнал поступает в кодек 9, совмещающий АЦП и ЦАП, где преобразуется в цифровой вид – шестнадцатиразрядный двоичный код. В качестве кодека применена микросхема AD73311. Полученный таким образом сигнал в виде кода поступает в сигнальный процессор 13 (реализованный на микросхеме ADSP-2181) и подвергается в нём спектральной обработке по алгоритму скользящего быстрого преобразования Фурье (БПФ). Максимальное время преобразования не превышает 10 мс. Спектральное преобразование доплеровского сигнала позволяет использовать максимальное количество полезной информации о сигнале и минимизировать действие помех. Реализованные алгоритмы обнаружения и распознавания сигналов обеспечивают высокую точность и помехоустойчивость оценки доплеровской частоты. Алгоритмы спектральной обработки доплеровского сигнала в процессоре включают в себя пороговое обнаружение спектральных составляющих сигнала с максимальной амплитудой в заданном частотном диапазоне на фоне усредненной величины шума. При этом захват, сопровождение и удержание сигнала проводятся при двух значениях порогов, обеспечивающих коридор снижения, который регулируется программно в широких пределах.
Программно диапазон измеряемых скоростей (частот) доплеровского сигнала, в котором производится обнаружение сигнала, может быть изменён в пределах 0,4 – 46 км/ч. Процессор осуществляет рекурсивную фильтрацию значений текущего спектра и определяет центр тяжести спектра сигнала, что позволяет многократно повысить точность оценки выделенной доплеровской частоты. Темп выдачи полученной оценки (т.е. коэффициент фильтрации спектра) зависит от вычисленной частоты и изменяется от минимума к максимуму при увеличении измеряемой скорости. При измерении скорости движения отцепа (доплеровской частоты) темп выдачи отсчётов скорости (спектра)
адаптирован к реальным параметрам движения. Интервал выдачи отсчётов скорости может быть программным путём уменьшен до дискретных величин, кратных 2 мс.
При работе РИС-В3М из-за флуктуаций входного сигнала, отражённого от отцепов, возможна кратковременная потеря индикаторов информации об отцепе, вследствие замираний отражённого сигнала. Для исключения этого явления при пропаданиях доплеровской частоты на входе блока обработки процессор переводит РИС-В3М в режим памяти предыдущего значения до тех пор, пока не произойдёт новое обнаружение сигнала (но не более 2 с). Программно реализована процедура калибровки индикатора, т.е. необходимое соответствие измеренной доплеровской частоты аналоговому напряжению на выходе кодека и частоте меандра на выходе преобразователя аналог-частота 10. Результат вычисления частоты (скорости) преобразуется в кодеке 9 в аналоговый вид и подаётся на схему формирования 10 частотных выходных сигналов. Частотный преобразователь 10 выполнен на микросхеме AD654JN. Схема формирования частотного выхода 10 осуществляет преобразование сигнала с кодека в импульсный сигнал типа меандр, частота которого соответствует частоте принятого доплеровского сигнала. Этот импульсный сигнал поступает на выход по двум каналам 7, 8 в противофазе.
Для настройки параметров РИС-В3М в процессе его установки или эксплуатации, а также для дистанционного контроля этих параметров, включая оценку работоспособности индикатора в целом, в измерителе реализован цифровой канал связи 14 процессора с внешним компьютером и дополнительный аналоговый канал.
Связь с компьютером ведётся по двухпроводной линии в стандарте протокола RS-485 через приёмопередатчик 14, который также обеспечивает гальваническую развязку линии связи. Приёмопередатчик выполнен на микросхеме МАХ1480ВЕРI. Рабочая программа функционирования РИС-В3М, реализованная на языке ассемблера, защита в энергонезависимой памяти 12 (flash AT49F001-90PI, ПЗУ С256 ANAT4), начинает работу при включении блока питания прибора 15.
Непрерывный дистанционный контроль работоспособности и рабочих параметров РИС-В3М в процессе эксплуатации
осуществляется на двух каналах – рабочем информационном канале датчика 7 и 8, формирующем два парафазных выходных меандра (частотный выход) с частотой, пропорциональной скорости отцепа и на сервисном канале цифровой линии связи 14 в стандарте протокола RS-485.
Контроль работоспособности РИС-В3М по информационному частотному выходу ведётся непрерывно в реальном режиме времени. При штатном функционировании датчика, на его частотном выходе всегда присутствует переменный сигнал независимо от наличия отцепа в зоне его действия.
При отсутствии отцепа на тормозной позиции сигнал стабильной фиксированной частоты, формируемый на оном из выходов процессора 13, подаётся на вход «калибровка» РИС-В3М, т.е. на вход генератора приёмно-передающего модуля 5. этим достигается сквозной контроль функционирования всего тракта индикатора скорости. Выходной сигнал контроля передаётся на пост ЭЦ по штатному информационному каналу с частотного выхода РИС-В3М. Этот режим называют дежурным. Наличие контрольной, фиксированной частоты на входе КДК УВК-системы воспринимается как работоспособное состояние РИС-В3М.
При наличии отцепа на тормозной позиции сигнальный (измерительный) режим, на информационном выходе появляется сигнал доплеровской частоты, пропорциональный скорости движения отцепа. При этом контрольный сигнал в линию связи не передаётся.
Следует заметить, что частота контрольного сигнала выбрана вне диапазона рабочих измеряемых частот доплеровского сигнала (105 – 2450 Гц).
В случае нарушения работоспособности датчика, на частотном выходе переменный сигнал отсутствует, т.е. появляется третье, нулевое или иное состояние, которое регистрируется в КДК УВК-системы как выход РИС-В3М из штатного режима функционирования, т.е. неисправность.
Любые другие случайные состояния выходного частотного канала, возможные в результате сбоя в работе РИС-В3М, анализируются самим датчиком (измерителем) по цепям самотестирования и устраняются встроенной в индикатор системой самодиагностики.
Контрольный сигнал в дежурном режиме также используется для постоянного самотестирования в индикаторе для оценки передаточных характеристик электронных узлов индикатора, а также возможной разъюстировки индикатора скорости в процессе эксплуатации.
Критерием оценки при этом служит появление отклонения в калибровочной частоте сигнала, либо его уровня относительно калиброванного порога.
Задающим генератором контрольного сигнала, непрерывно подаваемого на калибровочный вход РИС-В3М, является собственный процесс 13, формирующий переменный сигнал от кварцевого автогенератора. Таким образом, отсутствие одного из двух сигналов (контрольного либо информационного) на частотном выходе РИС-В3М свидетельствует о его нештатном режиме работы, что воспринимается как неисправность РИС-В3М, либо нарушение соединительных информационных цепей.
Для полного контроля, настройки параметров РИС-В3М, вывода параметров самодиагностики и прогнозирования технического состояния измерителя, дистанционного управления его калибровкой реализуется цифровой канал RS-485. Контроль параметров датчика по цифровому каналу осуществляется в режиме запроса системой (или оператором) данных с клавиатуры промышленного или персонального компьютера с поста ЭЦ. Этот канал предусмотрен и для использования его в процессе полной проверки и отладки РИС-В3М как в заводских условиях предприятия-изготовителя, так и в лабораториях КИП дистанции.
При этом цифровой канал призван решать следующие задачи: дистанционный контроль наиболее важных параметров измерителя по запросу системы (или оператора) с клавиатуры ПК в процессе эксплуатации, не демонтируя РИС-В3М с установочной штанги. В этом случае по адресному запросу интерфейс измерителя выводит на экран компьютера такие параметры, как заводской номер, потенциал, установленные пороги обнаружения сигнала, инерционность, а также параметры состояния наиболее важных программных узлов и блоков, буферов АЦП, стеков процессора, ячеек памяти.
Эта информация позволяет при необходимости дистанционно опознать адрес датчика, определить его заданные индивидуальные параметры, оценить качество работы, включая нарушения
юстировочных параметров за время эксплуатации. Отдельные характеристики функционирования РИС-В3М архивируются и параллельно используются для прогнозной оценки его работоспособности.
Блок питания РИС-В3М построен по трансформаторной схеме и включает в себя плату стабилизаторов напряжения: -30 В, +5 В и стабилизатор тока для питания СВЧ-генератора в ППМ. Контроль за параметрами источника питания осуществляет контроллер блока питания (ADM 705AN), который формирует команду сброса процессора при выходе за границы допустимого напряжения источников питания.
Конструктивно РИС-В3М представляет собой цилиндрический корпус из сплава АК 12, который является несущей частью индикатора. Электрические элементы блока питания и блока обработки доплеровского сигнала смонтированы на съёмных печатных платах, что обеспечивает свободный доступ к элементам схемы при контрольных операциях, а также при ремонте РИС-В3М.
Антенное устройство представляет собой конический рупор с волноводом сечением 3,4 7,2 мм и фокусирующей линзой с параболической поверхностью, изготовленной из фторопласта. На волноводный фланец антенны специальными центрирующими винтами крепится приёмно-передающий модуль (ППМ).
Антенное устройство вместе с ППМ крепится к корпусу, соединяющему всю конструкцию, с помощью двух стяжек и гаек через резиновые прокладки.
Корпус, кожух и крышка в сборе образует внешнюю оболочку индикатора, герметизация которой осуществляется при помощи резиновых прокладок, заложенных в пазы.
Крепёжные элементы РИС-В3М обеспечивают ручную регулировку положения индикатора в вертикальной плоскости не менее чем на ±10°, а в горизонтальной плоскости регулировку не менее чем на ±15° при помощи четырёх пазов, выполненных в основании, которое фиксируется четырьмя болтами.
|
из
5.00
|
Обсуждение в статье: Радиолокационные индикаторы скорости |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы