 |
Главная |


Выбор подъемного-транспортных механизмов необходимых для монтажа оборудование разрабатываемого участка
|
из
5.00
|
Подъемно-транспортное оборудование является существенной частью почти каждого производства и сфер обслуживания и играет большую роль в механизации погрузочно-разгрузочных работ.
Современные поточные технологические и автоматизированные линии, межцеховой и внутрицеховой транспорт, погрузочно-разгрузочные операции для транспортирования сырья, полуфабрикатов и готовой продукции на всех стадиях обработки и складирования, складской переработки грузов органически связаны с применением разнообразных подъемно-транспортных машин и механизмов, обеспечивающих непрерывность и ритмичность производственных процессов.
Основная задача применения подъемно-транспортной техники - внедрение высокопроизводительных комплексов, включающих в себя принципиально новые системы подъемно-транспортных машин. Комплексная механизация и автоматизация погрузочно-разгрузочных, транспортных и складских работ осуществляется на основании:
· создания качественно новых подъемно-транспортных машин и установок;
· повышения грузоподъемности при одновременном снижении материалоемкости за счет применения новых материалов, технологий;
· увеличения производительности за счет применения автоматического и дистанционного управления социальных захватных и других подъемных агрегатов, а также улучшение условий труда крановщиков;
· повышения надежности работы машин и долговечности их элементов путем разработки новых конструктивных решений, применения новых методов расчета и материалов с улучшенными физико-механическими свойствами.
По своему назначению и конструктивному исполнению подъемно-транспортные машины подразделяются на основные виды: грузоподъемные - машины периодического действия, транспортирующие - машины непрерывного действия, промышленные роботы - автоматические машины периодического действия.
Основные виды подъемно-транспортных машин:
1. Грузоподъемные машины - домкраты, лебедки (тали), грузоподъемные краны и погрузчики.
2. Транспортирующие машины (конвейеры) подразделяются на машины с тяговым органом - ленточные конвейеры, цепные конвейеры, тележечные конвейеры, машины без тягового органа - гравитационные устройства, качающиеся конвейеры, шнеки (винтовые конвейеры), пневматические транспортирующие устройства.
3. Промышленные роботы, подразделяющиеся по назначению, конструктивным показателям, способу управления, быстродействию, точности.
Параметры грузоподъемных машин. Грузоподъемные машины предназначены для подъема и перемещения грузов на небольшие расстояния в пределах определенной площади промышленного предприятия и склада. Они характеризуются следующими основными параметрами: грузоподъемностью, скоростями движения отдельных механизмов, режимом работы, пролетом, вылетом, высотой подъема грузозахватного устройства. Значение этих параметров регламентируется стандартом.
Грузоподъемность - номинальная (максимальная) масса груза, на подъем которого рассчитана машина. Значение грузоподъемности определяется ГОСТом 1575-81, устанавливающим ряд номинальных грузоподъемностей для всех грузоподъемных машин периодического действия (кроме пассажирских лифтов) от 0,01 до 1250 т.
Скорости движения различных механизмов выбирают в зависимости от требований технологического процесса, характера работы, типа машины и ее потребности, производительности. Они подразделяются на скорость подъема груза (Vlmax=25-30 м/мин), скорость передвижения моста крана (100-120 м/мин), скорость передвижения тележек (35-50 м/мин).
Режим работы. Согласно ГОСТу 25835-83 все механизмы ГПМ подразделяются на шесть групп, определяемых классом использования и классом нагружения. Классы использования механизмов характеризуют интенсивность использования механизма при эксплуатации. Они устанавливаются в зависимости от общего времени работы, т.е. времени нахождения данного механизма в движении в течении заданного срока службы.
Пролетом называю расстояние по горизонтали между осями рельсов кранового пути, они увязаны с пролетами зданий.
Вылетом стрелы называю расстояние по горизонтали от оси вращения поворотной части стрелового крана до оси грузозахватного органа.
Высота подъема (для кранов мостового типа) - расстояние от уровня поля до верхнего положения грузозахватного устройства.
Грузоподъемные машины
Домкраты - простейшие грузоподъемные механизмы, применяемые в основном при ремонтных и монтажных работах. Высота подъема грузов составляет 0,15 - 0,7 м. Используются в виде толкателей, т.е. подъем грузов осуществляется без грузозахватных устройств. Некоторые домкраты могут производить горизонтальное перемещение поднятых средств на небольшое расстояние. В зависимости от конструкции домкраты делятся на реечные, винтовые, гидравлические.
Реечные домкраты с ручным приводом (грузоподъемностью 0,5 - 10 т) обладают существенным недостатком - невозможностью установки груза на высоте с большой точностью.

Винтовые домкраты имеют ручной привод и электрический. Винтовой домкрат состоит из корпуса, винта, головки, шарнирно соединенной с винтом, закрепленной в корпусе гайки и приводной рукоятки с собачкой кранового механизма. При качательных движениях рукоятки храповое колесо вместе с винтом поворачивается и винт выдвигается из корпуса. Самопроизвольное опускание груза предотвращается наличием самотормозящей резьбы.
Недостатки: 1) низкий КПД - 0,3 - 0,4; 2) малая скорость опускания груза.
Гидравлические домкраты. Привод - ручной или машинный. Преимущества - плавность хода и точная установка по высоте поднимаемого груза, КПД - 0,15 - 0,8, грузоподъемность - до 750 т. Недостаток - малая скорость подъема (0,001 - 0,002 м/с) при ручном приводе. Гидравлический домкрат с ручным приводом состоит из гидроцилиндра, плунжера, ручного поршневого насоса с приводной рукояткой и бачка для масла.

Подъем груза осуществляется поршнем, который перемещается за счет подачи масла. Опускание груза производится путем соединения полости гидроцилиндра с бачком с помощью вентиля. Скорость регулируется степенью открытия спускного вентиля.
Лебедки (тали). Лебедки - грузоподъемные устройства для подъема и перемещения грузов тяговым органом (канат или цепь), навиваемым на барабан. Привод - ручной или машинный. Они используются в грузоподъемных кранах и подъемниках как механизмы подъема груза и передвижения крановых тележек.
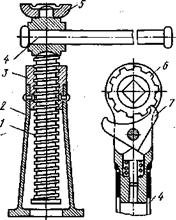
Тали - компактные подъемные лебедки, имеющие ручной и механический привод и подвешиваемые к балкам или специальным тележкам, перемещающимся по подвесному пути (монорельсу). Применение - внутри и межцеховое перемещение грузов, обслуживание станков, поточных и автоматических линий и т.п.

Рис. Таль с ручным приводом: 1 - пластинчатая шарнирная цепь; 2 - собачка тормоза; 3 - крюк; 4 - приводное колесо; 5 - дисковый тормоз; 6 - храповое колесо тормоза; 7 - сварная цепь
Грузоподъемные краны предназначены для подъема, перемещения, опускания груза с помощью грузозахватного устройства. Это универсальные грузоподъемные машины, состоящие из остова (в виде металлоконструкции) и крановых механизмов, грузозахватных устройств. Грузозахватные устройства применяются как универсальные - крюки, петли для непосредственного принятия груза, так и специальные. Для штучных грузов (ящиков, бочек, мешков, листов и т.д.) - клещевые, эксцентриковые и другие захваты, грейферы - для подачи сыпучих грузов, электромагниты - для транспортирования грузов из стали и чугуна, вакуумные захваты - для транспортирования листового материала, а также коробок, ящиков и т.п.
Наибольшее применение получили стационарные рельсовые мостовые и поворотные стреловые краны, краны-штабелеры.
Мостовые краныприменяются для внутрицеховых и внутрискладских погрузочно-разгрузочных работ. Схема двухбалочного мостового крана опорного типа состоит из главных и концевых балок, составляющих мост крана. В концевых балках моста укреплены ходовые колеса крана на рельсы, которые закреплены на подкрановых балках, установленных на колоннах цеха или эстакадах, механизмы подъема груза и передвижения тележки смонтированы на крановой тележке. К мосту прикреплена кабина крановщика. Питание электроэнергией механизмов крана производится с помощью специальных токоведущих шин. Основная характеристика двухбалочных мостовых кранов - пролет, он составляет 10,5 - 34,5 м; грузоподъемность - 5 - 100 т. При грузоподъемности 1 - 5 т применяют однобалочные краны (кран-билки) с электроприводом. Применяются также опорные однобалочные и двухбалочные мостовые краны с ручным приводом грузоподъемностью от 3,2 до 20 т.
В стреловых (консольных) кранах груз подвешен к балкам на концевой части стрелы или на грузовой тележке, перемещающейся по стреле, и находится вне опорного контура крана, что обуславливает возникновение опрокидывающего момента.
Кран закреплен к стене с помощью двух опор - верхней и нижней, воспринимающих горизонтальные и вертикальные нагрузки. Металлоконструкция крана имеет Г-обрязную форму, на которой расположены механизмы подъема груза, передвижения тележки и попорота крана. По стреле перемещается тележка, установленная на ролики с грузозахватным устройством с помощью каната, наматываемого на барабан перемещения тележки. При применении электротали в качестве верхней балки используется монорельс.
Штабелеры.Штабелеры являются разновидностью подъемно-транспортного оборудования, и предназначены исключительно для работы в условиях складских помещений. В соответствии с этим целевым назначением к этой технике предъявляется ряд специфических требований:
· минимальные размеры, позволяющие работать в стесненных условиях (узкие проходы);
· высокая маневренность, способность разворачиваться на месте, обеспечивая минимальные радиус поворота и размеры рабочего коридора;
· способность работать с грузом на большой высоте, высокая остаточная грузоподъемность.
Подобные требования приводят к очень специфичной компоновке этих складских машин. Например, при отсутствии необходимости работы на неровном грунте колеса, как правило литые, имеют небольшой диаметр, дорожный просвет также очень мал. Для достижения высокой маневренности и упрощения конструкции ходовой части обычно используется одно-единственное ведущее колесо, являющееся также и управляемым. Располагается оно под корпусом так, чтобы исключить возможность травмирования персонала, что важно при работе в тесноте. Благодаря такой конструкции машина буквально ходит за ведущим колесом в любую сторону и может разворачиваться с минимальным радиусом почти в пределах собственных габаритов.
Кроме того, условия эксплуатации позволили вынести опорные колеса далеко вперед, за мачту, что дало возможность принципиально освободиться от противовеса. Благодаря этому проекция центра тяжести груза находится на минимальном расстоянии от опорных точек машины (практически в пределах треугольника устойчивости).
Погрузчики. Погрузчик -- специальное транспортное средство, предназначенное для поднятия, переноса и складирования различных грузов с помощью вил или других рабочих приспособлений, -- продолжает рассказ Максим Лебедев.
Погрузчики с противовесом классифицируются по следующим признакам:
· грузоподъемность;
· расположение подъемного устройства;
· тип привода;
· число опорных колес.
По грузоподъемности вилочные погрузчики могут быть от 500 кг до 16 т.
Портовые погрузчики могут поднимать груз даже до 52 т.
По расположению подъемного устройства погрузчики бывают фронтальные и боковые. У фронтальных погрузчиков рабочее приспособление расположено спереди. По типу рабочего приспособления фронтальные погрузчики разделяют на вилочные и ковшовые. У боковых погрузчиков подъемное устройство расположено сбоку. Такие погрузчики широко используются на складах с небольшими межстеллажными расстояниями и при складировании длинномерных грузов.
По типу привода вилочные погрузчики с противовесом бывают дизельными, газобензиновыми (газовые, бензиновые) и электрическими.
Электрические погрузчики различаются также по числу опорных колес: бывают четырех- и трехопорные электропогрузчики. Четырехопорные погрузчики более устойчивы, а характеристики их остаточной грузоподъемности выше, чем у трехопорных. Трехопорные электропогрузчики более маневренны: они способны передвигаться в более узких рабочих коридорах, чем четырехопорные.
Лифты грузовые - это подъемники стационарного типа, предназначенные для вертикального перемещения тарно-штучных грузов между этажами на предприятиях оптово-розничной торговли и общепита. Они выпускаются следующего типа: малые грузоподъемностью 40, 100 и 250 кг, грузовые выжимные грузоподъемностью от 500 до 3200 кг, и грузовые тротуарные грузоподъемностью 500 и 630 кг.
Выжимные - это лифты, у которых привод расположен внизу и перемещение кабины осуществляется за счет действия силы снизу вверх. Тротуарные лифты предназначены для установки в подвальном помещении, находящемся под тротуаром хозяйственных дворов, складов, магазинов, предприятий общепита.
Автопогрузчики предназначены для работы на открытых площадках в целях экологической безопасности и техники безопасности, так как они имеют привод от двигателя внутреннего сгорания. Конструкция основных узлов автопогрузчика выполнена на базе узлов автомобиля.
Электропогрузчики имеют привод от электродвигателя с питанием от аккумуляторной батареи. Они более экологичны, поэтому применяются для выполнения работ и в закрытых помещениях - цехах, складах.
Рабочее оборудование погрузчиков однотипно - грузоподъемник с набором грузозахватных органов (вилы, челюстные захваты, ковши и др.). Грузоподъемник имеет раму, по которой перемещается каретка с грузозахватным органом, имеющим поворот вокруг горизонтальной оси на угол 90 - 360 градусов. Привод грузовой каретки обычно гидравлический (от гидроцилиндров). Грузоподъемность погрузчиков составляет 0,63 - 45 т, максимальная высота подъема 4,5 м.
наибольшей компактностью, так как имеют возможность складываться в пределах своего основания.
По способу управления роботы делятся на программные, адаптивные и интеллектуальные.
Программные - работают по заранее заданной программе - роботы первого поколения.
Адаптивное управление - работа по заранее заданному алгоритму управления. Роботы второго поколения. Они имеют средства очувствления (техническое зрение, устройство ориентации, датчики усилий и т.д.), реагируют на изменение обстановки и меняющиеся работы, разрабатывают программу управления по обходу препятствий, выбору необходимых деталей и т.д.
Интеллектуальное управление - наряду с вышеприведенными качествами имеют внутреннюю систему самообучения, которая выбирает и запоминает наиболее эффективные программные приемы выполнения рабочих действий, т.е. такая развитая система управления наделяет робот искусственным интеллектом. Это роботы 3-го поколения.
Заключения
Для использования транспортировки и монтажа оборудования мы используем грузоподъемный кран чтобы выгрузить станок из транспорта; штабелер чтобы зависти станок в место куда будем устанавливать его; мостовой кран для транспортировки станка по цеху.
|
из
5.00
|
Обсуждение в статье: Выбор подъемного-транспортных механизмов необходимых для монтажа оборудование разрабатываемого участка |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы