 |
Главная |


Эквивалентные преобразования исходной структурной схемы системы автоматического управления
|
из
5.00
|
Введение.
Теория автоматического управления — одна из важнейших технических наук общего применения. Она дает теоретическую базу для исследования и практического применения любых автоматизированных систем во всех областях техники;
Управление — целенаправленное изменение (поддержание) состояния (параметров) технического объекта в соответствии с имеющимся алгоритмом функционирования.
Объектами управления могут быть различные процессы: технологические, энергетические, транспортные, информационные. Управление объектом достигается путем воздействий, оказываемых на него либо непосредственно человеком, либо автоматическим управляющим устройством (в том числе ЭВМ) по заданной программе, составленной на основании информации о целях и задачах управления.
Автоматическое управление — поддержание нормального функционирования управляемого объекта в соответствии с заданным алгоритмом без непосредственного участия человека. Осуществляется с помощью технических средств, обеспечивающих автоматический сбор, хранение, передачу и обработку информации, а также формирование управляющих воздействий на объект управления.
При автоматизации одной области промышленности возникает потребность в перестройке технологии, аппаратуры и организации в смежной области. Автоматизация приносит наибольший эффект в тех случаях, когда технологи, конструкторы, специалисты по организации и планированию работают в тесном контакте со специалистами по автоматизации. Такая совместная работа предполагает их взаимопонимание, которое может быть достигнуто лишь в том случае, если специалисты различных профилей будут иметь общие представления об автоматизации производственных процессов.
Таким образом, автоматизация работы оборудования включает:
· механизацию тяжелых работ и трудоемких процессов при оснащении агрегатов механизмами, заменяющими ручную работу персонала;
· дистанционное управление, т.е. пуск, останов и управление работой механизмов на расстоянии с пульта, на котором сосредоточены средства управления основными регулирующими органами агрегатов. Дистанционное управление обычно осуществляется электрическим приводом, реже применяются пневматические или гидравлические приводы;
· автоматизацию непрерывно протекающих процессов при нормальной работе оборудования, т.е. замену действий персонала по управлению механизмами работой автоматических регуляторов;
· автоматическое управление по заданной программе (в том числе пуском агрегатов).
К функциям контроля за состоянием объекта относятся:
· технологическая защита, автоматически предотвращающая и ликвидирующая нештатные ситуации, возникающие при работе оборудования. Защита осуществляет останов агрегатов или снижение их нагрузки, или производит различные локальные операции, предохраняющие агрегат от поломки;
· блокировка, выполняющая в определенной последовательности ряд операций в случае возникновения начальной команды от устройств технологической защиты или со щита управления. В результате агрегат переводится из одного состояния в другое;
· автоматическое включение резерва — устройств, пускающих в работу резервные элементы, не нарушая нормального протекания технологического процесса, в случае останова по какой-либо причине работающих механизмов.
· технологическая сигнализация, автоматически подающая световой или звуковой сигнал при отклонении от нормы того или иного параметра.
Сигнализация автоматически подает сигнал при срабатывании защиты, блокировки, а также при включении резерва и служит для привлечения внимания дежурного персонала к месту возникновения неисправности.
В процессе производства в силу различных причин значения параметров технологического процесса могут изменяться, вызывая отклонение процесса от нормального режима. Нарушенный режим должен восстановиться и поддерживаться около заданного значения путем воздействия на технологический процесс через органы управления. Поддержание параметров технологического процесса в диапазоне заданных значений выполняет система автоматического регулирования (САР).
Система, предназначенная для поддержания некоторой величины в техническом объекте (производственном процессе) на заданном уровне и обладающая структурой называется системой автоматического регулирования.
Кроме замкнутых систем в промышленности применяются разомкнутые системы. В этих системах управляющее устройство может состоять из нескольких звеньев. Каждое звено имеет вход, на который подается воздействие извне, и выход, который передает воздействие вовне. Каждое звено преобразует воздействие, подаваемое на его вход, по физической природе или по численному значению. Один элемент, например, преобразует изменение температуры в изменение давления, другой — изменение давления в перемещение рабочего органа.
Для разомкнутых автоматических систем входом является задающее воздействие и нагрузка, а выходом — управляемая величина (работа).
В процессе совершенствования систем автоматического управления появились комбинированные системы, у которых измерительная часть выполняется электрической, а исполнительные механизмы — гидравлическими или пневматическими.
Классифицировать системы автоматического управления можно по методу управления и функциональному признаку. По методу управления все системы делятся на двабольших класса: адаптивные и неадаптивные (обыкновенные). Неадаптивные системы, относящиеся к категории простых, не изменяют своей структуры в процессе управления. Они наиболее разработаны и широко применяются в различных отраслях промышленности. Эти системы подразделяются на три типа: разомкнутые, замкнутые и комбинированные.
У замкнутой и разомкнутой систем входом считают задающее воздействие, а выходом регулируемый параметр. Основной цепью воздействия называют цепь, идущую от входа к выходу.
Применение разомкнутой системы управления обычно требует участия человека, который должен наблюдать за результатом управления и соответственно изменять задающее воздействие. В качестве примера можно привести работу водителя автомашины. Для оперативного контроля за результатом управления применяют разомкнутую измерительную систему, которая повышает точность управления. Основным звеном в этих системах является человек. Цепь, преобразующая изменение регулируемого параметра в контрольный сигнал, подаваемый на вход управляющего устройства, называют обратной связью.
Эквивалентные преобразования исходной структурной схемы системы автоматического управления.
Для определения передаточных свойств систем автоматического управления их структурные схемы преобразуют к эквивалентному расчетному виду, позволяющему получать передаточные функции разомкнутых и замкнутых систем. Преобразования структурных схем выполняются в соответствии с определенными правилами.
В результате структурных преобразований многоконтурная разветвленная структура преобразуется в одноконтурную систему автоматического управления.
По заданию на курсовую работу исходная структурная схема линейной системы автоматического регулирования имеет вид:
| W5(p) |
| W3(p) |
| W1(p) |
| W2(p) |
| W4(p) |
ЗвеньяW1(p) иW3(p), W2(p) и W4(p) соединены последовательно.
Последовательное соединение звеньев. При последовательном соединении звеньев выходная величина предыдущего звена является входной величиной последующего звена.
Передаточная функция системы последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев:

Используя правилопоследовательного соединения звеньев, получаем эквивалентную заданной системе структурную схему одноконтурной замкнутой системы автоматического управления:
| W5(p) |
| W1(p)* W3(p) * |
| W2(p)* W4(p) |
ЗвеньяW1(p)* W3(p) и W2(p)* W4(p) соединены параллельно
Параллельное соединение звеньев. Входная величина системы, состоящей из параллельно соединенных звеньев, одновременно подается на входы всех звеньев, а ее выходная величина равна сумме выходных величин отдельных звеньев.
Передаточная функция системы, состоящей из параллельно соединенных звеньев, равна сумме передаточных функций этих звеньев:
Таким образом, звеньяW1(p)* W3(p) и W2(p)* W4(p) и сумматор объединяем в одно звено с передаточной функцией W1(p)* W3(p) + W2(p)* W4(p)
Используя правилопараллельного соединения звеньев, получаем
следующую структуру.
| W5(p) |
| W1(p)* W3(p) + W2(p)* W4(p) * |
Разомкнутая система автоматического управления для данного случая будет выглядеть следующим образом:
| W1(p)* W3(p) + W2(p)* W4(p)+ W5(p) * |
2. Определение передаточной функции разомкнутой системы.
| W1(p)* W3(p) + W2(p)* W4(p)+ W5(p) |
Х(t) Y(t)
 W1(p)
W1(p)  W3(p) + W2(p) W4(p)+ W5(p)
W3(p) + W2(p) W4(p)+ W5(p)
Динамические характеристики элементов систем автоматического управления обычно описываются дифференциальными уравнениями не выше второго порядка. Причем различные по своей физической природе элементы могут описываться одинаковыми дифференциальными уравнениями, поэтому их относят к определенным классам, называемым типовыми звеньями.
Звено 1: y(t) = k1x(t)
Звено 2: 
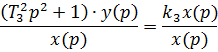
Звено 3: 
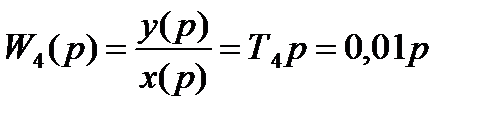
Звено 4: 
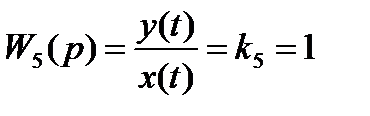
Звено 5: y(t) = k5x(t)
Параметры дифференциальных уравнений:
k1 = 4 k2 = 0,2; k3 = 2; ; k5 = 1T2=0,03; T3=0,06; T4=0, 01;
Передаточная функция звена или системы – это отношения изображения выходной величины к изображению входной величины, то есть 
От обычной записи дифференциального уравнения переходим к операторной форме записи, причем  ,
,  и так далее по степеням,
и так далее по степеням,  .
.
Подставив исходные данные в уравнения звеньев, получим их значения:
Звено 1: y(t) = k1x(t)
Звено 2:




Звено 3: 



Звено 4:
y(p)=T4p x(p)
Звено 5: y(t) = k5x(t)
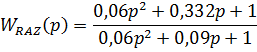
Подставляем в уравнение передаточной функции разомкнутой системы:
WRAZ(p) = WRAZ = W1(p) W3(p) + W2(p) W4(p)+ W5(p)






Упрощаем, передаточную функцию разомкнутой системы избавляясь от  в числителе и
в числителе и  в знаменателе
в знаменателе

|
из
5.00
|
Обсуждение в статье: Эквивалентные преобразования исходной структурной схемы системы автоматического управления |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы