 |
Главная |


Пересылка четырех значений (MOVE4)
|
из
5.00
|
A(выход) = A(вход); B(выход) = B(вход);
C(выход) = C(вход); D(выход) = D(вход).
| Раздел ‘Регулирование’ |
Звено PID (PID)
Этот блок формирует выходное значение по ПИД-закону от величины, поданной на вход INP:

где i– текущий такт пересчета, KP, KDи KI– соответственно коэффициенты при пропорциональной, дифференциальной и интегральной составляющих, ∆t – период пересчета блока в секундах (длительность такта).
Модуль подаваемого на вход KIотрицательного значения передается на выход. Далее при подаче на вход KIнеотрицательного значения регулирование начинается с установленной величины.
Для ограничения величины управляющего воздействия используются входы блока MINи MAX. Если величина управления меньше MIN, то Q= MIN, если величина управления больше MAX, то Q= MAX, при этом в обоих случаях накопление интегральной составляющей закона регулирования прекращается.
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y.
Ведение в алгоритм параметра ∆tисключает необходимость пересчета настроек регулятора при смене периода пересчета.
Звено PID2 (PID2)
Данный блок представляет собой PID-регулятор с возможностью модифицирования алгоритма и имеет, относительно блока PID, дополнительные входы MODEи IN2и дополнительный выход dQk= Q*k – Qk-1(Q*k– вычисленное значение на данном такте пересчета, Qk-1 – значение выхода Qна предыдущем такте пересчета).
Если установлен 11-й бит (считая с 0) MODE, интегральная составляющая PID-закона обнуляется.
Если установлен 8-й бит MODE, то Q= IN2, а при последующем переходе в автоматический режим регулирования (MODE=0) скачок управляющего воздействия (Q) сглаживается.
Если установлены биты 8 и 10, то Q= IN2, а при последующем переходе в автоматический режим регулирования (MODE=0) скачок управляющего воздействия (Q) не сглаживается.
Если установлен 9-й бит MODE, то Q= Q*+ IN2, где Q*– значение, вычисленное по PID-закону.
Установка бита 0 или 1 MODEзапрещает увеличение интегральной составляющей, при этом:
 если установлен 0-й бит и dQ<= 0, то Q= Q*
если установлен 0-й бит и dQ<= 0, то Q= Q*
если установлен 0-й бит и dQ> 0, то Q= Qk-1
если установлен 1-й бит и dQ>= 0, то Q= Q*
если установлен 1-й бит и dQ< 0, то Q= Qk-1
Звено PDD (PDD)
Этот блок формирует выходное значение по ПДД-закону от значения входа INP:
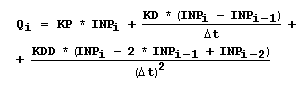
где i– текущий такт пересчета, KPи KD– соответственно коэффициенты при пропорциональной и дифференциальной составляющих, KDD– коэффициент при второй производной, ∆t – период пересчета блока в секундах (длительность такта).
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y. Все дополнительные функции контура также программируются с помощью отдельных блоков.
Звено PDD2 (PDD2)
Данный блок представляет собой PDD-регулятор с возможностью запрета увеличения/уменьшения вычисляемого значения (Q) и имеет, относительно блока PDD, дополнительный вход MODEи дополнительный выход dQk= Q*k – Qk-1(Q*k– вычисленное значение на данном такте пересчета, Qk-1 – значение выхода Qна предыдущем такте пересчета).
если MODE= 1 и dQ<= 0, то Q= Q*
если MODE= 1 и dQ> 0, то Q= Qk-1
если MODE= 2 и dQ>= 0, то Q= Q*
если MODE= 2 и dQ< 0, то Q= Qk-1
|
из
5.00
|
Обсуждение в статье: Пересылка четырех значений (MOVE4) |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы