 |
Главная |


Устройство манипуляторов
|
из
5.00
|
Исполнительные органы манипуляторов чаще всего представляют захваты, приводимые в действие различного рода двигателями. В зависимости от характера выполняемых операций число степеней подвижности захвата может быть различным и колебаться от трех до двенадцати.
На рис. 4.2 изображен манипулятор с пятью степенями подвижности.
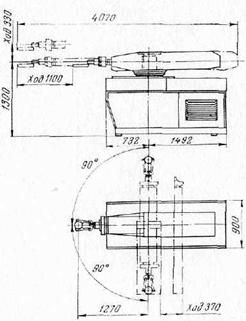
Рис. 4.2. Общий вид манипулятора
Конструкции захвата разнообразны. Во многих случаях предусматривается набор сменных захватов, приспособленных к различным видам операций и формам предметов. Кроме обычных механических, применяются захваты магнитные, вакуумные и т. п. Смена захватов может производиться как вручную, так и автоматически. Вместо захвата в манипуляторах может быть применен любой необходимый инструмент: резак для резки металла, рубильный молоток, пульверизатор дли окраски и др. Смена инструмента также может быть ручная пли автоматическая.
Приводные устройства для управления движением захвата или рабочего инструмента располагаются по-разному. Большей частью их помещают непосредственно в каждом шарнире или возле него. Реже их компонуют в одном или двух моторных блоках.
В качестве источника движения используются электрические, пневматические и гидравлические виды привода.
Условия применения некоторых промышленных манипуляторов могут потребовать их передвижения по полу цеха или на подвесных путях. В первом случае используют обычную рельсовую или безрельсовую тележку, но с автоматическим или же с телеуправлением. Во втором случае манипулятор устанавливают на подвеску, перемещающуюся на роликах по потолочному или настенному рельсу. Автоматическое управление движением тележки или подвески может быть связано в единую систему управления.
Транспортные манипуляторы
Для нормального функционирования автоматизированных производственных участков литейного цеха необходимо обеспечить оперативную транспортную связь между ними и цеховыми складами, например складом стержней, моделей, а также бесперебойное снабжение рабочих мест материалами, технологической оснасткой и инструментом.
Решение задачи автоматизации транспортировки грузов связывается с разработкой транспортных манипуляторов, которые составляют особую группу программных манипуляторов.
В состав их входят: транспортное средство, собственно манипулятор с механизмом захвата и устройство программного управления, которое может являться составной частью общецеховой подсистемы управления и регулирования.
Конструктивной основой транспортных манипуляторов в зависимости от конкретной технологической задачи могут служить мостовые и консольные краны, краны-штабелеры и тельферы (рис. 4.3).
Управляет транспортным комплексом оператор. В память системы заносится и хранится там информация о распределении, например, модельных плит в ячейках склада. По команде с пульта, выданной в виде кода номера модельной плиты, процессор автоматически определяет номер ячейки склада, в которой находится данная плита, и выдает команды для отправки к этой ячейке кран-штабелера склада. Кран-штабелер захватывает поддон с модельной плитой и доставляет его на загрузочную позицию склада. Одновременно с вводом номера модельной плиты оператор вводит в ЭВМ адрес участка – формовочного автомата, – на которым должен быть доставлен поддон с модельной плитой. Транспортный манипулятор направляется на склад, забирает поддон и доставляет его на соответствующую позицию участка (автомата).
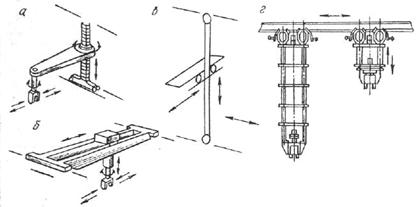
Рис. 4.3. Конструктивные схемы транспортных манипуляторов:
а – консольных кран-манипулятор; б – мостовой кран манипулятор; в – штабеле-манипулятор; г – тельфер-манипулятор.
|
из
5.00
|
Обсуждение в статье: Устройство манипуляторов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы