 |
Главная |


Функциональная схема системы автоматического регулирования
|
из
5.00
|
Модуль 1 Начальный (базовый)
Основные понятия и определения
Алгоритм функционирования – совокупность предписаний, направленных на качественное выполнение технического процесса в каком – либо устройстве или системе. В общем случае алгоритм функционирования является составным и реализует задачи управления, контроля, диагностирования, защиты и др.
Алгоритм управления – это совокупность предписаний, определяющих характер воздействия на процесс с целью выполнения им заданного алгоритма функционирования.
Управление – это процесс осуществления воздействии, соответствующих алгоритму управления.
Автоматическое управление – это управление, осуществляемое без непосредственного участия человека (за исключением простейших операций включения и др.).
Автоматическое регулирование – разновидность автоматического управления. Оно обеспечивает поддержание постоянства некоторой регулируемой величины, характеризующей, технологический процесс, или же изменение её по заданному закону, осуществляемое посредством изменения состояния регулируемого объекта.
Автоматическая система управления (регулирования) АСУ (АСР) – система, реализующая автоматическое управление (регулирование).
Функциональная схема системы автоматического регулирования
Системы автоматического регулирования, как правило, можно представить следующим образом:
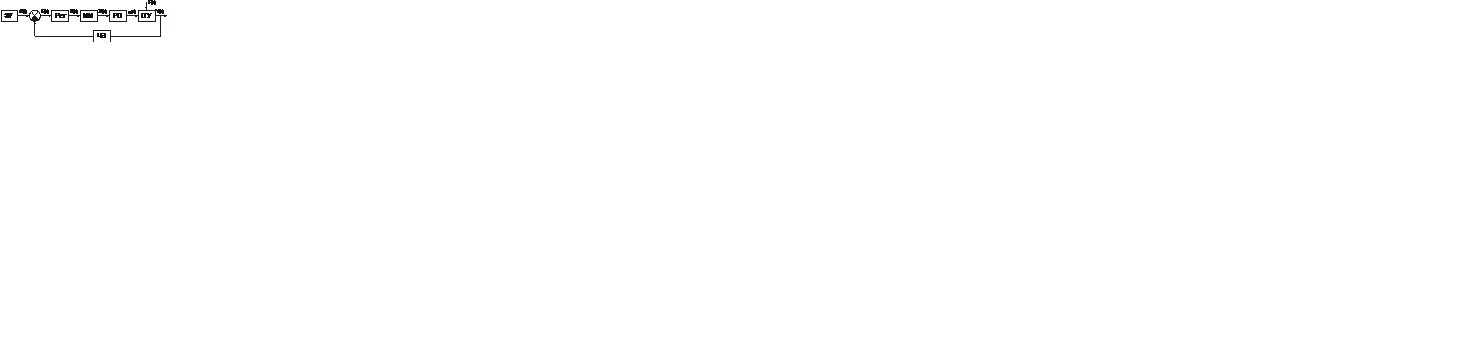
Рисунок 1.
Каждому элементу принципиальной схемы соответствует блок, имеющий вход и выход. Вход и выход представлены обобщёнными физическими величинами.
ЗУ – задающее устройство,
ОУ – объект управления, устройство или их совокупность, осуществляющая технический процесс в соответствии с алгоритмом функционирования, технологический процесс или их набор, подчинённый одной цели управления (судно, ДТП, паровой котёл, дизель, ДГ, вспомогательные механизмы и так далее).
РО – регулирующий орган, каждый ОУ должен иметь устройство, называемое рабочим органом, при изменении положения или состояния которого показатели технологического процесса будут изменяться в заданных пределах. Примерами РО различных управляемых объектов является обмотки возбуждения электродвигателей и генераторов, руль судна, рейка топливных насосов дизеля, вентили, клапаны, заслонки систем трубопроводов.
ИМ – исполнительный механизм - приводит к изменению положения регулирующего органа ОУ,
РЕГ – регулятор - комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих или автоматическое поддержание заданного значения его регулируемой величины, или автоматическое изменение ее по определенному закону.
ЧЭ – чувствительный элемент, датчик - предназначаются для того, чтобы реагировать на отклонение регулируемого параметра в объекте регулирования от заданного значения, преобразовывать геометрические, физические или химические измеренные величины в электрические, пневматические или гидравлические и передавать их последующим органам регулирования и управления в удобной форме.
Любое управление состоит из трёх частей:
Сбор информации об ОУ посредством датчиков, установленных на нём;
Обработка собранной информации по заданному алгоритму управления в Рег;
Выдача управляющего воздействия на ОУ посредством исполнительных механизмов и регулирующих органов.
К элементам АСР прикладываются различные воздействия – внутренние и внешние. К внутренним относят управление U(t), внешние же поступают из вне и делятся на задающие и возмущающие.
Задающие воздействие прикладывается к АСР и определяет цель её работы (заданная частота вращения для двигателей, заданная температура для холодильных установок и так далее). Обычно обозначается G(t).
Возмущающее воздействие, как правило, препятствует достижению заданной цели в АСР. Например, расход пара для котла, момент сопротивления на валу дизеля. Обозначается F(t). Главное назначение систем автоматической стабилизации – борьба с возмущениями. На систему стабилизации в основном действуют два вида возмущений:
1. возмущения со стороны нагрузки на технологический объект,
2. возмущения в виде изменения сигнала задания на регулятор.
В первом случае система должна скомпенсировать внешнее возмущение, во втором – точно отработать сигнал задания.
Наиболее неприятным случаем является возмущение по нагрузке, так как при этом:
1. неизвестен момент подачи,
2. неизвестен характер или вид возмущающей функции.
Основные возмущения – это возмущения со стороны нагрузки на технологический агрегат, которые проявляются в виде произвольных изменений расходов, температур и т.д.
Выходной параметр ОУ, определяющий цель АСР, называется регулируемым и обозначается Y(t). Уместно привести одну из наиболее простых и вместе с тем основополагающих формул автоматики:
G(t) – Y(t) = E(t) (1),
где E(t)- ошибка регулирования или рассогласование – разность между задающим воздействием и регулируемым параметром.

Формула (1) при этом примет вид:
G(t) + Y(t) = E(t) (2).
На элемент сравнения поступает два сигнала – заданное значение и выходной сигнал ОУ. Последний называется сигналом обратной связи (ОС). В зависимости от знака, ОС могут быть положительными или отрицательными. ОС называется передача сигнала с выхода элемента на его вход и это понятие общее не только для информатики, но и электроники, технической диагностики и так далее.
Основной вид ОС, применяемых в автоматике – отрицательные ОС. Понятие ОС является в автоматике одним из основополагающих. Действительно, у РЕГ есть информация о заданном значении, но также необходимо знать: достигнуто ли оно. В противном случае заданное значение так и не будет достигнуто – управляющее устройство будет выдавать сигнал управления больший или меньший необходимого.
С целью формализации знаний АСР представляется в виде схем:
· Принципиальных (электрических, гидравлических, пневматических);
· Функциональных;
· Структурных.
Принципиальная электрическая схема.
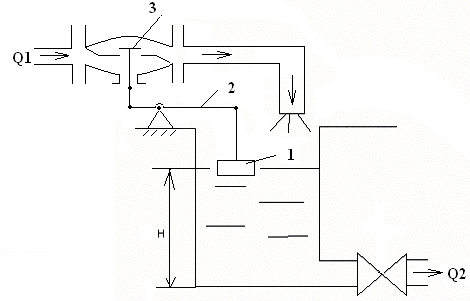
На принципиальной схеме представлена система регулирования уровня воды. Поплавок 1 действует непосредственно на дроссельный клапан 3 посредством рычага 2. при повышении уровня поплавок всплывает и уменьшает проходное сечение клапана до тех пор, пока не установится равновесие между притоком Q1 и расходом Q2 жидкости. при падении уровня раскрытие клапана увеличивается.

Функциональная схема.
Структурная схема.
Отличается от функциональной схемы тем, что внутри блоков содержатся передаточные функции, характеризующие динамические свойства соответствующего элемента.
|
из
5.00
|
Обсуждение в статье: Функциональная схема системы автоматического регулирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы