 |
Главная |


Типы конструкции конечностей
|
из
5.00
|
Конечность – часть конструкции робота, выполняющая локомоционные действия. Они бывают нескольких типов, и выбор конкретного типа виляет на реализацию алгоритма ходьбы и движений. Конечность характеризуется количеством степеней свободы, конструкцией рычагов или параметрами специфических компонентов.
Типы конструкций конечностей делятся на следующие группы[Amol Deshmukh,2006][Edward Z. Moore,2002]:
1. Рычажные схемы
a. Однорычажная
· Односегментная
· Многосегментная
b. Пантографная (многорычажная)
2. Телескопическая схема
3. Дуговая схема
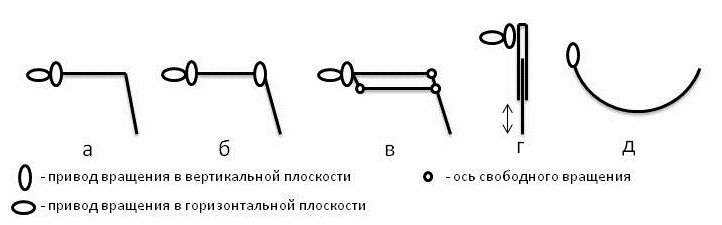
Рис.14. Схемы конструкций конечностей
Однорычажная односегментная схема (Рис.14.а) имеет жесткую конфигурацию и две степени свободы (горизонталь и вертикаль). Это дает возможность перемещения по прямой при продолговатой форме корпуса, разворот на месте и регулировку высоты робота в небольших пределах. Последнее возможно при определенных условиях (масса робота, мощность приводов, свойства поверхности), так как при изменении высоты будет происходить проскальзывание конечностей. При подъеме опорные точки будут сдвигаться под нижнюю часть корпуса, а при спуске отодвигаться в стороны.
Однорычажная многосегментная схема (Рис.14.б) имеет изменяемую конфигурацию за счет подвижных сегментов. Количество степеней свободы при этом обычно на одну больше числа сегментов. Каждый сегмент соединяется с соседним (один привод), а первый по счету от корпуса имеет два привода для горизонтального и вертикального перемещения. Число сегментов ограничивается потребностями разработчика (или заказчика) и характеристиками используемого оборудования. Чаще всего в шестиногих роботах встречается двухсегментные конечности с тремя степенями свободы. Этого достаточно для выполнения локомоционных действий.
Пантографная схема (Рис.14.в) позволяет управлять опорной частью конечности. Её можно использовать в двух вариантах. Первый вариант использования позволяет в больших пределах изменять высоту робота при вставании на конечности. Опорная часть конечности будет оставаться на одном месте. Второй вариант использования данной схемы – управление опорным сегментом конечности посредством привода. При этом привод располагается в корпусе-туловище, а не на сочленении. Такой вариант может значительно уменьшить силу тяжести, действующую на конечность при поднятии, что повышает устойчивость.
Телескопическая схема (Рис.14.г) представляет собой поршень с пружинным, пневматическим или гидравлическим приводом. Обычно поршень закрепляется на оси вращения (или двух осях) без дополнительных сегментов. Особенностью схемы является отсутствие рычагов, что убирает усилие, действующее на крепеж и привод конечности. Изменение высоты поднятия конечности заменяется уровнем выдвижения цилиндра поршня. Движение вперед осуществляется изменением уровня выдвижения цилиндра и углом поворота привода, плоскость вращения которого перпендикулярна направлению движения и пересекает поверхность. Для возможности движения вбок и поворота требуется второй привод, изменяющий угол наклона к поверхности в плоскости, перпендикулярной первой. Отличие телескопической системы от рычажной заключается также в дуге вращения. Если в рычажной системе дуга находится в плоскости поверхности, то в телескопической плоскости перпендикулярны. Другими словами при перемещении с фиксированным положением поршня робот будет подниматься до середины дуги, а потом опускаться. Для того чтобы этого не происходило, требуется изменять положение поршня. Используя подобную схему, часто реализуют движение прыжками.
Дуговая схема (Рис.14.д) представляет собой дугу из пластичного материала, закрепленную на оси вращения с одного конца. Конструкция представляет собой нечто среднее между колесом и конечностью. Движение происходит при вращении привода в направлении выпуклой стороны дуги. Принципы движения и поворотов похожи на гусеничный ход. Достоинством схемы является высокая проходимость, и средняя скоростные показатели. Может быть использовано в роботах без ориентации “верх-низ”. Недостатками является однонаправленность движения (вращение дуги в обратном направлении может приводить к зацепу или застреванию), нестабильный, подпрыгивающий характер движения.
Модели роботов, относящиеся к рассмотренным схемам:
· Однорычажный односегментный – MH2 компании Lynxmotion[Lynxmotion]
· Однорычажный многосегментный - AH3-R, BH3-R, CH3-R, A-pod, T-Hex, Phoenix компании Lynxmotion
· Пантографный - Kondo KMR-M6 компании Kondo[Kondo]
· Телескопический - James and McGill's Scout II Robot разработчика Джеймса Эндрю Смита[James Andrew Smith]
· Дуговой – RHex компании Boston Dynamics
2.7 Алгоритмы походок шестиногих роботов
Современная методика разработки алгоритмов походок основана на биологическом подходе. Так как прообразом механических конечностей являются конечности живых существ, то и порядок локомоционных действий изначально повторяет таковые у насекомого или животного. Впоследствии некоторые алгоритмы изменяются и комбинируются.
Существующие алгоритмы можно разделить на две группы:
· Алгоритмы с заранее сконфигурированными параметрами (количество конечностей, последовательность действий)
· Адаптивные алгоритмы
-Алгоритмы, учитывающие изменение числа конечностей и их сочленений
-Алгоритмы с учетом неровностей и наклонов поверхности
-Самообучающиеся алгоритмы
Адаптивные алгоритмы, такие как группа fault tolerant gait – “терпимые к неисправностям”, позволяют изменять последовательность действий робота при возникновении проблем с функционированием конечностей. Разработка и реализация подобных алгоритмов не тривиальна и не будет рассматриваться в данной работе.
Адаптивный алгоритм, называемый свободным, реализует апериодическую несимметричную походку. Такой алгоритм не указывает заранее заданную последовательность перемещения конкретных ног, а описывает действия в зависимости от траектории, состояния поверхности и показателей робота.
Алгоритмы для заданного числа конечностей описывают возможные действия для перемещения механизма с заранее известными параметрами робота. К таким параметрам относятся число ног робота, число степеней свободы и их направленность. Наличие определенных датчиков позволяет дополнять базовый алгоритм различными функциями и новыми действиями.
Алгоритмы с заранее заданными параметрами характеризуются числом и позицией опорных ног, поднятых ног, порядком выполняемых действий.
Локомоционные алгоритмы для гексапедального робота[Beihang University, Politecnico di Milano]:
1. Алгоритмы 3+3
· Инсектоподобный
· Животноподобный
· Комбинированный
2. Алгоритмы 4+2
· Инсектоподобный
3. Алгоритм 5+1 инсектоподобный
Также существует способ передвижения, при котором все конечности одновременно выполняют перемещение, а в качестве опоры используется дно корпуса. Это нельзя назвать походкой, но можно использовать как простой способ передвижения.
|
из
5.00
|
Обсуждение в статье: Типы конструкции конечностей |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы