 |
Главная |


Полигон для проведения экспериментов
|
из
5.00
|
Для проведения исследований реализованных алгоритмов передвижения был изготовлен испытательный полигон (Рис. 47). Полигон состоит из основания полигона – двух листов оргалита размером 1м х 1м с наклеенными на них полосами липучей ленты и препятствий, присоединяемых на липучей ленте к основанию полигона. Изготовлено типа препятствий: небольшие кочки, сделанные из картона, и большое препятствие, сделанное из пенопласта с тряпичным покрытием.

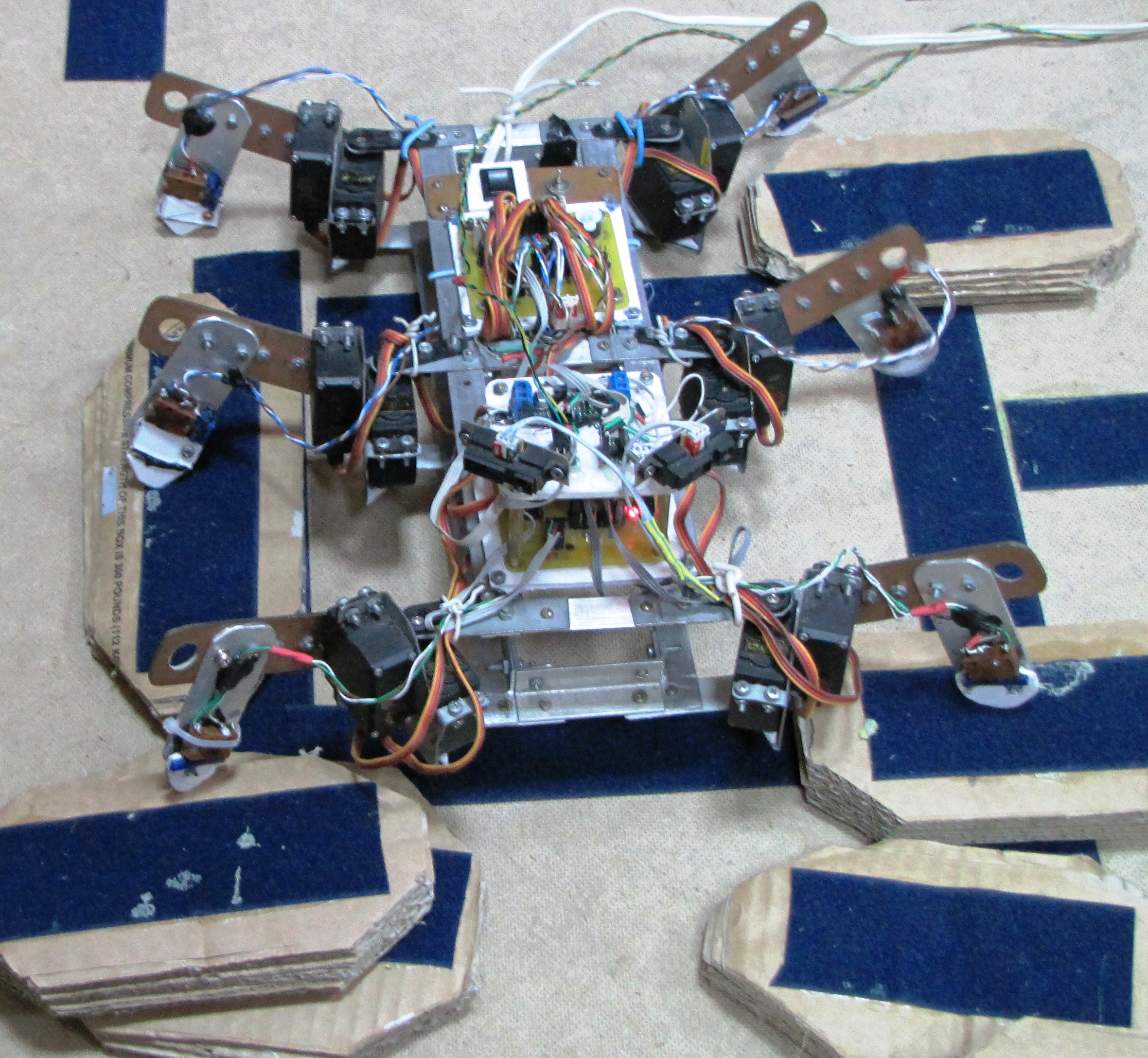 Рис.50а. Полигон для испытаний Рис.50б. Робот на полигоне
Рис.50а. Полигон для испытаний Рис.50б. Робот на полигоне
Для проведения экспериментов на полигоне из препятствий была построена экспериментальная «трасса», состоящая из трех основных частей:
1.Ровная поверхность без препятствий
2. Часть трассы с небольшими картонными препятствиями («кочки»)
3. Участок трассы с продолжительным препятствием из пенопласта, которое робот проходит с наклоном на одну сторону («наклонное препятствие»)
На полигоне было проведено 4 серии экспериментов:
Серия экспериментов 1 - неадаптивное движение без коррекции
В этом режиме робот быстро и уверенно проходил ровную часть трассы, но на длинном препятствии робот терял равновесие. На «кочках» (небольших картонных препятствиях) Hexapod МР4-2012 и вовсе застревал (зацеплялся за препятствие).
Серия экспериментов 2 - движение с коррекцией по акселерометру
Робот быстро, но чуть медленнее, чем в предыдущей серии экспериментов, проходил ровную часть трассы, длинное препятствие робот проходил устойчиво, без потери равновесия. Но на «кочках» робот шел неуверенно, постоянно спотыкался и в конце пути, как и в предыдущем эксперименте, застревал (цеплялся нижней частью за препятствие)
Серия экспериментов 3 - адаптивное движение без коррекции
По ровной поверхности робот двигался не очень быстро, но вполне уверенно. На длинном препятствии робот терял равновесие и проходил его неровно. На «кочках» робот не застревал, однако после каждой кочки его равновесие терялось.
Серия экспериментов 4 - адаптивное движение без коррекции
По ровной поверхности робот двигался довольно медленно. Длинное препятствие робот проходил очень устойчиво. Кочки также были пройдены устойчиво, довольно ровно, без существенной потери равновесия. Однако в целом передвижение робота было очень медленным, и из-за отталкивания от препятствий робот немного отклонился от первоначального прямого направления.
Выводы
Эксперименты подтвердили предположение о том, что наиболее устойчивым способом передвижения из четырех будет адаптивное передвижение с использованием стабилизации положения по акселерометру. При таком способе передвижения «Hexapod МР4-2012» уверенно проходит оба типа препятствий, имеющихся на полигоне. Однако у этого способа есть и недостатки:
1. Робот движется довольно медленно
2. Программа управления роботом при данном способе передвижения имеет довольно сложную реализацию
3. При передвижении робот может отклониться от прямого первоначального направления
Тем не менее, основной задачей шагающей робототехники является именно передвижение по сложным неровным поверхностям и способ адаптивного движения с коррекцией по акселерометру подходит для этой задачи лучше всего.
Таким образом, экспериментально было доказано преимущество адаптивных алгоритмов при передвижении по неровной поверхности.
Однако преимущества адаптивных шагающих роботов не ограничиваются только лучшей проходимостью неровных поверхностей. Благодаря использованию большого числа сенсоров, адаптивные роботы имеют возможность решения многих практических задач. Одна из таких задач – интеллектуальный анализ данных для предварительной корректировки последующих движений и составления карты рельефа поверхности.
|
из
5.00
|
Обсуждение в статье: Полигон для проведения экспериментов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы