 |
Главная |


Расчёт коэффициентов усиления устройств, входящих в САР
|
из
5.00
|
 (2. 1. 2)
(2. 1. 2)
 (2. 1. 3)
(2. 1. 3)
 (2 .1 .4)
(2 .1 .4)
 (2. 3. 4)
(2. 3. 4)







Пусть  =1400, тогда
=1400, тогда  =5,15
=5,15





(4.1),

 (4.2).
(4.2).
Моментную составляющую желательно свести к минимуму, поэтому:
 (4.3).
(4.3).
Откуда:
 (4.4).
(4.4).
Введем обозначение:  .
.
Для упрощения реализации корректирующего устройства примем во внимание, что оно должно работать при частотах  , тогда:
, тогда:
 (4.5).
(4.5).
Передаточная функция системы по ошибке после введения связи по возмущающему моменту примет вид:
 (4.6).
(4.6).
ЛАЧХ передаточной функции по ошибке при введении связи по возмущающему воздействию представлена на Графике 3.
Рассчитаем ошибку системы при частоте  :
:
 (4.7),
(4.7),
 (4.8).
(4.8).
Сравнивая значения ошибки САР без связи по возмущающему воздействию и с ее введением, видим, что во втором случае ошибка уменьшилась почти на 2 порядка.
Приложение 1
ЧАСТЬ 2
1. Построение желаемой ЛАЧХ. Рабочая точка имеет те же координаты, что и в Части 1. Определим левую границу частоты среза  по графикам зависимости
по графикам зависимости  , tп от Р max.
, tп от Р max.

Для  = 25% имеем:
= 25% имеем:
 (1.1),
(1.1),
 (1.2).
(1.2).
Определим правую границу частоты среза  :
:
 (1.3),
(1.3),
 (1.4),
(1.4),
 (1.5).
(1.5).
Тогда в соответствии с (1.4) имеем:

 (1.6).
(1.6).
Окончательно получаем:
 . (1.7).
. (1.7).
Через рабочую точку проводим прямую под наклоном +60дБ/дек (условие возникновение предельных циклов) до уровня – Lм = -16 дБ (найдено по номограмме). Из этой точки проводим среднечастотную асимптоту под наклоном +20дБ/дек до пересечения с ЛАЧХ неизменяемой части. См. График 1. В ходе построения получили:
b = 0.005 с3 (1.8),
 (1.9.).
(1.9.).
Полученное значение частоты среза удовлетворяет условию:
 (1.10).
(1.10).
Пересечение  и
и  произошло в точке B, значение амплитуды в которой достаточно, чтобы система удовлетворяла требованиям по устойчивости и в введении последовательного корректирующего устройства нет необходимости:
произошло в точке B, значение амплитуды в которой достаточно, чтобы система удовлетворяла требованиям по устойчивости и в введении последовательного корректирующего устройства нет необходимости:
 (1.11).
(1.11).
2. Расчет параллельного корректирующего устройства. Расчет параллельного корректирующего устройства будем производить теми же методами, что в Части 1.
С целью упрощения реализации параллельного корректирующего устройства и улучшения параметров устойчивости проведем ЛАЧХ  начиная с точки В под наклоном +40 дБ/дек. В этом случае имеем:
начиная с точки В под наклоном +40 дБ/дек. В этом случае имеем:
 (2.1).
(2.1).
Потребуем, чтобы:
 (2.2),
(2.2),
Тогда:
 (2.3).
(2.3).
Исходя из (2.1), с учетом (2.2) получаем:
 (2.4).
(2.4).
Потребуем, чтобы:
 (2.5),
(2.5),
Откуда:
 [ед ] (2.6).
[ед ] (2.6).
С учетом (2.3) и (2.6) получим:
 с (2.7).
с (2.7).
Итак, передаточная функция параллельного корректирующего устройства имеет вид:
 (2.8),
(2.8),
где  .
.
3. Техническая реализация параллельного корректирующего устройства. Реализовывать корректирующее устройство будем посредством последовательного соединения двух RC-цепочек.
Соединение RC-цепочек имеет вид:
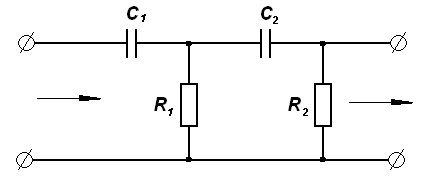
 (3.1).
(3.1).
Для исключения взаимного влияния цепочек необходимо, чтобы ток во втором контуре был приблизительно в 10 раз меньше тока в первом контуре. Для выполнения этого условия необходимо, чтобы:
 (3.2).
(3.2).
Примем  Ф = 50мкФ, тогда:
Ф = 50мкФ, тогда:
 кОм,
кОм,
 кОм,
кОм,
 .
.
4. Проверка устойчивости внутреннего контура. Необходимо проверить устойчивость контура местной обратной связи:
 (4.1),
(4.1),
 = + 900 + 2·760 = + 2420,
= + 900 + 2·760 = + 2420,
 = + 3·900 – 2·900 + 450 = + 1350.
= + 3·900 – 2·900 + 450 = + 1350.

Запас устойчивости внутреннего контура больше 300, что благоприятно сказывается на устойчивости системы.
5. Проверка устойчивости всей системы. Определим запас устойчивости всей системы:
 (5.1),
(5.1),
 = + 900 +2· 900 – 2·800 + 2·30 = 1160,
= + 900 +2· 900 – 2·800 + 2·30 = 1160,
 .
.
Запас устойчивости всей системы удовлетворяет требованиям по устойчивости.
6. Переходной процесс САУ. Найдем переходный процесс САР при подаче на вход управляющего воздействия  .
.
 (6.1),
(6.1),
 (6.2),
(6.2),
 (6.3).
(6.3).
Передаточную функцию  находим исходя из построенной ЛАЧХ (см. График 1):
находим исходя из построенной ЛАЧХ (см. График 1):
 (6.4).
(6.4).
Переходной процесс находим с использованием программы MatLab 6.5 (см. График 2).
Проверим перерегулирование:
 (6.5).
(6.5).
Найденное перерегулирование удовлетворяет ТЗ.
Проверим время переходного процесса:
tп = 0.42 c (6.6).
Найденное время переходного процесса удовлетворяет ТЗ.
7. Расчет коэффициентов усиления устройств, входящих в САУ. Найдем коэффициенты усиления устройств, входящих САУ.
 [ед ] (7.1),
[ед ] (7.1),
 (7.2),
(7.2),
 [ед ] (7.3),
[ед ] (7.3),
 (7.4).
(7.4).
8. Введение в состав САУ нелинейного элемента. Введем нелинейный элемент как показано на Схеме 3. Нелинейность, вводимая в систему, имеет вид:

Уравнение нелинейного элемента в общем виде выглядит следующим образом:
 (8.1).
(8.1).
Так как заданный нелинейный элемент не имеет петли гистерезиса, то:
 (8.2).
(8.2).
Для данного типа нелинейности:
 (8.3),
(8.3),
где k = tg450 =1.
 (8.4),
(8.4),
 (8.5),
(8.5),
 (8.6).
(8.6).
Исследуем систему на наличие предельных циклов и в случае их существования исследуем каждый на устойчивость.
Условие нахождения системы на границе устойчивости:
 (8.7),
(8.7),
 (8.8),
(8.8),
 (8.9),
(8.9),
 (8.10).
(8.10).
Так как , то  , условие существование в САР предельных циклов:
, условие существование в САР предельных циклов:
 (8.11).
(8.11).
Графики  ,
,  ,
,  представлены на Графике 3. В соответствии с Графиком 3 имеем два предельных цикла с параметрами:
представлены на Графике 3. В соответствии с Графиком 3 имеем два предельных цикла с параметрами:
 (8.12),
(8.12),
 (8.13).
(8.13).
Предельный цикл является устойчивым, если при  ЛФЧХ линейной части системы
ЛФЧХ линейной части системы  , а при
, а при  -
-  . Применительно к исследуемой системе можно увидеть, что устойчивым является предельный цикл с параметрами (8.13).
. Применительно к исследуемой системе можно увидеть, что устойчивым является предельный цикл с параметрами (8.13).
Приложение 2
Запишем уравнение системы по структурной схеме:

(2.1.1)
Введём обозначения:
 (2. 1. 2)
(2. 1. 2)
 (2. 1. 3)
(2. 1. 3)
 (2 .1 .4)
(2 .1 .4)
 (2. 1. 5)
(2. 1. 5)
 (2. 1. 6)
(2. 1. 6)
 (2. 1. 7)
(2. 1. 7)
Введём обозначение:  (2. 1. 8)
(2. 1. 8)
Окончательно, передаточная функция разомкнутой системы будет иметь вид:
 (2. 1. 9)
(2. 1. 9)
|
из
5.00
|
Обсуждение в статье: Расчёт коэффициентов усиления устройств, входящих в САР |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы