 |
Главная |


Синтез регулятора тока
|
из
5.00
|
Синтез системы подчиненного управления
Формулировка требований к системе и расчет параметров объекта управления
Поскольку задачей курсового проекта является сопоставление двух систем – то требование, предъявляемые к ЭП относятся как к линейной, так и к релейной системе управления. Одновременно они должны соответствовать большинству реальных объектов.
Таким образом, полагаем, что диапазон регулирования системы должен находиться в составляет D = 50... 10000.
В зависимости от схемотехники конкретного преобразователя и узлов системы управления. Кроме того, к динамическим показателям, которые должна обеспечивать система, относятся:
1) постоянство ускорения при пуске и торможении;
2) инвариантность ускорения к координатным возмущениям;
3) перерегулирование тока - не более 30 %;
4) перерегулирование скорости - не более 5%;
5) динамическая просадка скорости при набросе нагрузки не более 2%;
Для управления двигателем постоянного тока через преобразователи используем систему последовательной коррекции, система подчиненного регулирования. Преимущество систем с последовательной коррекцией является удобство ограничения любого из регулируемого параметров на заданном уровне. Поддержание заданных параметров на требуемом уровне достигается построением замкнутых систем управления, а повышение качественных показателей введением корректирующих звеньев, регуляторов.
При составлении структурной схемы тиристорный возбудитель представляем инерционным звеном первого порядка с передаточной функцией:
 ; (1.1)
; (1.1)
где Ктп –коэффициент усиления тиристорного возбудителя;
Тμ – постоянная времени тиристорного преобразователя.
На рисунке 1.1 приведена структурная схема объекта управления.
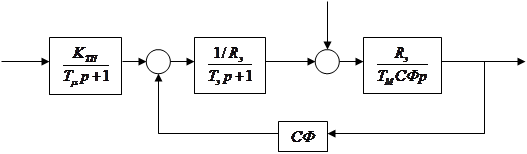 |
-Ic
Uз Uп І ω
-Е
Рисунок 1.1 - Структурная схема объекта управления

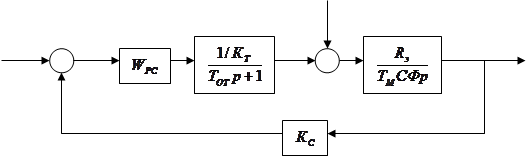
Рисунок 1.2 – Структурная схема линейной системы управления двигателем
Определяем электромагнитную и электромеханическую постоянные времени Тэ и ТМ:
 (1.2)
(1.2)
Определяем коэффициент пропорциональности между скоростью и ЭДС двигателя:
 (1.3)
(1.3)
Синтез регулятора тока
Внутренний контур образован регулятором тока, тиристорным преобразователем, якорной цепью и замыкается обратной связью по току и коэффициентом передачи Кот.
Оптимизированный контур представляет собой составную часть объекта управления в контуре регулирования скорости, от его быстродействия в значительной степени зависят динамические качества системы управления ЭП.
В большинстве случаев влиянием ЭДС двигателя на работу внутреннего контура можно пренебречь, ввиду относительно медленного изменения ЭДС по сравнению со скоростью изменения тока.
В случае не учета влияния ЭДС структурная схема приведена на рисунке 1.3

Рисунок 1.3 – Структурная схема контура тока
В этом контуре некомпенсируемая малая постоянная Тm= 0,005 с. Регулятор должен компенсировать все звенья со средними и большими постоянными времени и коэффициенты передачи остальных звеньев в контуре. Кроме того, регулятор должен обладать дополнительно интегрирующими свойствами, его постоянная времени должна быть равна Тот=2Тm. Следовательно:
 (1.4)
(1.4)
где Тот=2Тm – постоянная времени контура тока;
КТ – коэффициент обратной связи по току.
 (1.5)
(1.5)

Таким образом, регулятор тока представляет собой пропорционально-интегральный регулятор. Функциональная схема регулятора тока приведена на рисунке 1.3.

Рисунок 1.3 – Функциональная схема регулятора тока
1.3 Расчет регулятора скорости
Составными частями контура регулирования скорости вращения двигателя является объект регулирования, в который входят оптимизированный токовый контур и механическая часть ЭП, датчик скорости и регулятор скорости.
Поскольку к исследуемому ЭП не предъявляются высокие требования к точности поддержания скорости, то достаточно будет настроить регулятор скорости на модульный оптимум.
При оптимизации контура скорости будем считать, что свернутый контур тока представляем звеном первого порядка. Типовая оптимизированная по модульному оптимуму передаточная функция замкнутого контура имеет вид:
 (1.6)
(1.6)
Упрощенная передаточная функция замкнутого контура тока имеет вид:
 (1.7)
(1.7)
Приведем структурную схему контура скорости:
 |
Uзс -І ω
-Uc
Рисунок 1.5 – Структурная схема контура скорости
Передаточная функция регулятора скорости:
 (1.8)
(1.8)
 (1.9)
(1.9)
где ТКС=4Тm=0.02 – постоянная времени контура скорости;
КС – коэффициент обратной связи по скорости.
 (1.10)
(1.10)
Таким образом, получился П регулятор скорости. Функциональная схема приведена на рисунке 1.5.

Рисунок 1.5 – Функциональная схема регулятора скорости
|
из
5.00
|
Обсуждение в статье: Синтез регулятора тока |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы