 |
Главная |


Расчет задатчика интенсивности скорости
|
из
5.00
|
Для разгона и торможения двигателя с динамическим током меньшим тока упора применяют задатчик интенсивности скорости, преобразующий ступенчатый сигнал задания в линейно изменяющийся во времени сигнал. Установившееся значение выходного сигнала задатчика интенсивности – 10 В.
 |
Uзп Uзс

-
Рисунок 1.6 – Структурная схема задатчика интенсивности
Принимаем динамический ток двигателя:
 (1.11)
(1.11)
Динамический момент двигателя:
 (1.12)
(1.12)
Время разгона до номинальной скорости:
 (1.13)
(1.13)
В установившемся режиме выходное напряжение задатчика интенсивности равно выходному задающему напряжению.
 (1.14)
(1.14)
Примем U0=1 В, UЗ=10 В, тогда:
 (1.15)
(1.15)

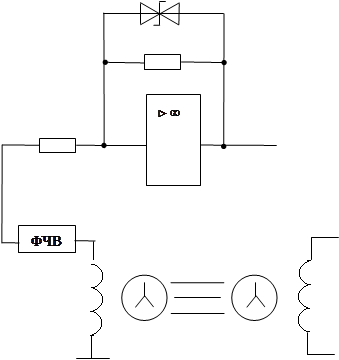
Рисунок 1.7 – Функциональная схема задатчика интенсивности
Расчет регулятора положения
Передаточная функция регулятора будет иметь вид:
 (1.16)
(1.16)
Коэффициент передачи регулятора положения:
 (1.17)
(1.17)
 (1.18)
(1.18)
 (1.19)
(1.19)
Коэффициент обратной связи:
 (1.20)
(1.20)
где SКР = 400мм – максимально возможное перемещение.
VD



BE BC
Рисунок 1.8 – Функциональная схема регулятора положения
Полная структурная схема системы подчиненного управления приведена на рисунке 1.9, функциональная схема на рисунке 1.10.

рисунок 1.9 - Полная структурная схема системы подчиненного управления

рисунок 1.10 - функциональная схема системы подчиненного управления
Исследование переходных процессов в системе подчиненного управления
Исследование переходных процессов в данной системе произведем с помощью программы «Matlab». Моделирование системы произведем для ее расчетных параметров и для случаев увеличения и уменьшения ТМ и ТЭ в два раза. Математическая модель системы подчиненного управления представлена на рисунке 1.11

Рисунок 1.12 – Переходные процессы при расчетных параметрах

Рисунок 1.13 – Переходные процессы при уменьшении ТЯ в 2 раза

Рисунок 1.14 – Переходные процессы при увеличении ТЯ в 2 раза

Рисунок 1.15 – Переходные процессы при уменьшении ТМ в 2 раза

Рисунок 1.16 – Переходные процессы при увеличении ТМ в 2 раза
Моделирование показало, что уменьшение Тя уменьшает колебательность и перерегулирование в системе. Увеличение ТЯ существенно увеличивает колебательность и перерегулирование в системе. При уменьшении ТМ в системе увеличивается перерегулирование, но установившееся значение тока двигателя уменьшается. Увеличение ТМ в 2 раза приводит к увеличению тока двигателя и времени разгона, но в свою очередь значительно уменьшает перерегулирование.
|
из
5.00
|
Обсуждение в статье: Расчет задатчика интенсивности скорости |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы