 |
Главная |


Синтез регулятора положения
|
из
5.00
|
Для облегчения дальнейшего синтеза релейного регулятора положения введем относительные координаты:
 ;
;  ;
;  ;
;  ;
;  . (2.19)
. (2.19)
Приводя замену переменных  , (к=1,…,4), преобразуем уравнения в систему дифференциальных уравнений возмущенного движения:
, (к=1,…,4), преобразуем уравнения в систему дифференциальных уравнений возмущенного движения:
 (2.20)
(2.20)
где 






Минимальное время отработки заданного перемещения позиционным следящим электроприводом (при наличии ограничений на максимальные значения тока и скорости) может быть обеспечено тогда, когда каждая ограничиваемая координата последовательно от входа к выходу объекта управления будет за минимально возможное время выведена на уровень ограничения и останется застабилизированной на этом уровне до тех пор, пока следующая координата не достигнет заданного значения. Качество управления таким электроприводом может быть задано функционалом:
 (2.21)
(2.21)
с изменяющимися в отдельных точках траектории движения системы весовыми коэффициентами W11, W22, W33. Эти точки определяют моменты стыковки законов управления, обеспечивающих оптимальную стабилизацию тока, скорости, положения.
Оптимальное управление, минимизирующее функционал (2.21) на траекториях движения системы (2.20) при ограничении  имеет вид:
имеет вид:
 (2.22)
(2.22)
Коэффициенты А41, А42, А43, А44 являются коэффициентами функции Ляпунова, полная производная во времени которой, вычисленная в соответствии с системой (2.20), равна подынтегральной функции функционала (2.21) с отрицательным знаком.
Построение функции Ляпунова для системы (2.20) приводит к неопределенности, вызванной нулевым корнем характеристического уравнения системы. Этот корень обусловлен наличием в составе силовой части электропривода интегрирующего звена, осуществляющего преобразование угловой скорости вала двигателя в перемещение рабочего органа исполнительного механизма.
Для устранения такого рода неопределенности достаточно представить интегрирующее звено с передаточной функцией  в виде звена с передаточной функцией
в виде звена с передаточной функцией  и устремить постоянную времени
и устремить постоянную времени  к бесконечности. При этом справедливо соотношение:
к бесконечности. При этом справедливо соотношение:
 (2.23)
(2.23)
В этом случае расчетная система дифференциальных уравнений возмущенного движения (2.20) видоизменится:
 (2.24)
(2.24)
где  .
.
Матричное уравнение Барбашина для синтеза управляющего воздействия релейного регулятора положения примет вид.

Вычисление коэффициентов Ляпунова А41, А42, А43, А44 произведено с помощью прикладной программы MCAD и имеют следующие значения:




В большинстве систем позиционирования желательно обеспечить траектории наибольшего быстродействия, т.е. сформировать прямоугольный график тока, треугольный (трапецеидальный) – скорости и параболический – положения.
Чтобы упростить задатчик, считаем, что переходный процесс позиционирования является процессом второго порядка. Тогда, применительно к данной системе, на траектории наибольшего быстродействия ускорение движения должно изменяться по закону:
 , (2.25)
, (2.25)
где  – ускорение и его максимальное значение;
– ускорение и его максимальное значение;
 – линейная скорость движения, формируемая задатчиком;
– линейная скорость движения, формируемая задатчиком;
 – соответственно задание на положение и выходная величина задатчика.
– соответственно задание на положение и выходная величина задатчика.
Структурная схема задатчика траектории, реализующего закон (2.25) приведена на рисунке 2.4

Рисунок 2.4 – Cтруктурная схема задатчика траектории положения
В соответствии с полученными схемами можно определить выходное напряжение регулятора положения:
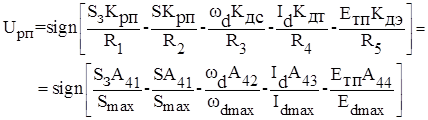 . (2.26)
. (2.26)
Решая неравенство относительно сопротивлений  , получим:
, получим:
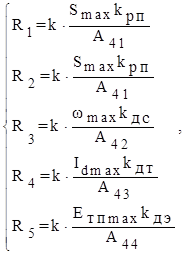 (2.28)
(2.28)
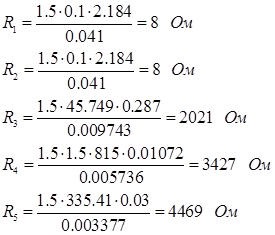
(2.29)
|
из
5.00
|
Обсуждение в статье: Синтез регулятора положения |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы