 |
Главная |


Кинематическое исследование
|
из
5.00
|
Введение
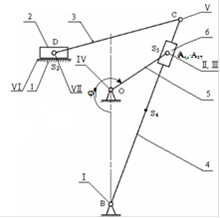
- ползун; 2 - стойка; 3 - шатун; 4 - кулиса; 5 - кривошип; 6 - шатун;
Рисунок 2 - Расчетная схема механизма поперечно-строгательного станка
Строгательные станки предназначены для обработки резцами плоскостей и фасонных линейчатых поверхностей. Поперечно-строгательные станки применяются при изготовлении мелких и средних по размерам деталей. Станки имеют рабочий ход, во время которого происходит резание, и обратный ход, когда инструмент возвращается в обратное положение.[1]
Структурное исследование
Определение количества и вида звеньев и кинематических пар
Исследуемый механизм содержит 6 звеньев, из них 1 звено - ползун, 2 звено - стойка, 3 звено - шатун, 4 звено - кулиса, 5 звено - кривошип, 6 звено - шатун.
Исследуемый механизм содержит семь кинематических пар, из них с первой по шестую вращательные кинематические пары с одной степенью свободы, седьмая поступательная кинематическая пара с одной степенью свободы.
Определение подвижности механизма
Подвижность механизма - количество независимых обобщенных координат однозначно определяющих положение точек и звеньев механизма на плоскости или в пространстве. Существуют общие закономерности в структуре механизмов связывающие подвижность механизма с числом и видом звеньев и кинематических пар. Эти закономерности называют структурными формулами механизма. Для плоских механизмов используется формула Чебышева:

где W - подвижность механизма;
 - количество подвижных звеньев в механизме;
- количество подвижных звеньев в механизме;
 - количество одноподвижных кинематических пар;
- количество одноподвижных кинематических пар;
 - количество двуподвижных кинематических пар.
- количество двуподвижных кинематических пар.

Подвижность данного механизма равна 1.
Структурная классификация механизма по Ассуру
Для решения задач анализа и синтеза сложных механизмов профессором Ассуром была предложена структурная классификация. Согласно этой классификации механизмы не имеющие избыточных связей и местных подвижностей состоят из первичных механизмов и структурных групп Ассура.[2]
Исследуемый механизм состоит из первичного механизма и двух групп Ассура (рисунок 3).

Кинематическое исследование
Для кинематического исследования механизма воспользуемся методом планов. План положений - это графическое изображение механизма в масштабе в каком-то положении.
2.1 Построение плана положений
Возьмем центр в точке О. Проведем окружность радиусом ОА. Эта окружность является траекторией движения точки A. Точка В отстает по вертикали от точки О на lОВ. Точка C будет двигаться по окружности радиусом BC, проводим дугу с центром в точке B.
Точка D движется прямолинейно, проводим траекторию движения точки D, на расстоянии от О равное h.
Окружность радиусом OA разбиваем на двенадцать участков через 30°. Получаем двенадцать точек: A1, A2, A3, …, A12.
Определим местонахождение точек механизма в первом положении кривошипа 5:
- соединяем точку O с точкой A1, получили положение звена пять и звена 6, центр масс которого находится в точке A1;
- звенья механизма жесткие и нерастяжимые. Берем линейку и проводим линию из точки B через точку A1 до пересечения с дугой BC. Точку пересечения обозначим C. Получаем положение звена четыре;
- берем раствор циркуля равный длине звена три. Одну ножку циркуля ставим в точку C и проводим дугу до пересечения с траекторией точки D. Точку пересечения обозначим D. Соединяем точку C с точкой D. Получаем положение звена три, а так же выходного звена механизма.
Аналогично построим положение звеньев механизма при повороте кривошипа на угол 30°, 60°, …,330°.
Для того чтобы построить график зависимости выходного звена от угла поворота кривошипа составим таблицу.
Таблица 2 - Зависимость перемещения выходного звена от положения кривошипа
| Положение | Перемещение выходного звена, м |
| 1 | 0 |
| 2 | 0,00538 |
| 3 | 0,04265 |
| 4 | 0,09804 |
| 5 | 0,16125 |
| 6 | 0,22374 |
| 7 | 0,27803 |
| 8 | 0,31528 |
| 9 | 0,32078 |
| 10 | 0,27217 |
| 11 | 0,16125 |
| 12 | 0,0486 |
|
из
5.00
|
Обсуждение в статье: Кинематическое исследование |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы