 |
Главная |


Определение приведенных моментов сил сопротивления и движущих сил
|
из
5.00
|
Для рабочих машин приведенный момент движущих сил 
 |
принимается постоянным (
 ), а приведенный момент сил сопротивления
), а приведенный момент сил сопротивления  определяется в результате приведения силы полезного сопротивления
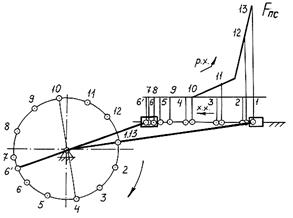
определяется в результате приведения силы полезного сопротивления  и сил тяжести звеньев. Сила полезного сопротивления , действующая на рабочий орган, определяется из механической характеристики технологического процесса. Чаще всего такая характеристика представлена в виде графической зависимости от хода ползуна
и сил тяжести звеньев. Сила полезного сопротивления , действующая на рабочий орган, определяется из механической характеристики технологического процесса. Чаще всего такая характеристика представлена в виде графической зависимости от хода ползуна  . Для решения динамических задач необходимо получить зависимость от обобщенной координаты. Для этого производится привязка механической характеристики к крайним положениям ползуна в соответствии с технологическим процессом и ее обработка. Так, для показанной на рис. 1.7 механической характеристики процесса высадки рабочий ход происходит при движении ползуна слева направо (точки 6/, 7…12, 13), а холостой ход – справа налево (точки 1, 2… 6, 6/). Следует обратить внимание, что крайнее правое положение характеризуется двумя значениями силы : в начале холостого хода (пол. 1)
. Для решения динамических задач необходимо получить зависимость от обобщенной координаты. Для этого производится привязка механической характеристики к крайним положениям ползуна в соответствии с технологическим процессом и ее обработка. Так, для показанной на рис. 1.7 механической характеристики процесса высадки рабочий ход происходит при движении ползуна слева направо (точки 6/, 7…12, 13), а холостой ход – справа налево (точки 1, 2… 6, 6/). Следует обратить внимание, что крайнее правое положение характеризуется двумя значениями силы : в начале холостого хода (пол. 1)  , а в конце рабочего хода (пол. 13)
, а в конце рабочего хода (пол. 13) 
Рис. 1.7
Как отмечено ранее, приведенный момент сил  представляется в виде алгебраической суммы
представляется в виде алгебраической суммы

Определение  выполняется из условия равенства мгновенных мощностей
выполняется из условия равенства мгновенных мощностей

Откуда
 (1.12)
(1.12)
где  и
и  - проекции силы
- проекции силы  на оси координат;
на оси координат;
 и
и  - проекции аналога скорости точки приложения силы ;
- проекции аналога скорости точки приложения силы ;
 - передаточная функция от i-го звена, к которому приложен момент
- передаточная функция от i-го звена, к которому приложен момент  , к звену 1;
, к звену 1;
 при направлении вращения звена 1 против часовой стрелки;
при направлении вращения звена 1 против часовой стрелки;
 - при направлении вращения звена 1 по часовой стрелке.
- при направлении вращения звена 1 по часовой стрелке.
В формуле  (1.12) силы
(1.12) силы  ,
,  и моменты берутся со знаками, соответствующими правой системе координат (положительное направление вращения – против часовой стрелки).
и моменты берутся со знаками, соответствующими правой системе координат (положительное направление вращения – против часовой стрелки).
Так, для горизонтального механизма (рис. 1.8, а)  определяется из равенства
определяется из равенства

откуда
 |
Рис. 1.8

Учитывая, что  ,
,  ,
,  , получим
, получим

В рассматриваемом положении сила  имеет отрицательное значение, так как она направлена против положительного направления оси X.
имеет отрицательное значение, так как она направлена против положительного направления оси X.
Для вертикального механизма (рис. 1.8, б) аналогичным образом можно получить

Сила  в изображенном случае положительна.
в изображенном случае положительна.
Приведенный момент движущих сил  определяется из условия, что при установившемся режиме движения изменение кинетической энергии машины за цикл равно нулю, т.е.
определяется из условия, что при установившемся режиме движения изменение кинетической энергии машины за цикл равно нулю, т.е.
 , и за цикл
, и за цикл 
Работа сил сопротивления вычисляется как
Интегрирование выполняется численным методом по правилу трапеций:

где  - шаг интегрирования в радианах.
- шаг интегрирования в радианах.
С учетом  при
при 
 .
.
1.2.3. Определение переменной составляющей приведенного момента инерции 
Переменная составляющая  определяется из условия равенства кинетических энергий, т.е. кинетическая энергия звена приведения, имеющего момент инерции , равна сумме кинетических энергий звеньев, характеризуемых переменными передаточными функциями:
определяется из условия равенства кинетических энергий, т.е. кинетическая энергия звена приведения, имеющего момент инерции , равна сумме кинетических энергий звеньев, характеризуемых переменными передаточными функциями:
 .
.
Разделив это выражение на  , с учетом того, что
, с учетом того, что 
получим

Для звеньев 2, 3 кривошипно-ползунного механизма (рис. 1.8)

Производная  , необходимая в последующем для определения закона движения звена приведения, имеет вид
, необходимая в последующем для определения закона движения звена приведения, имеет вид

1.2.4. Определение постоянной составляющей приведенного момента инерции  и момента инерции маховика
и момента инерции маховика 
В основу расчета положен метод Н.И Мерцалова [4]. Для определения изменения кинетической энергии машины  предварительно определяем работу движущих сил
предварительно определяем работу движущих сил  . Для i-го положения
. Для i-го положения
где 
Тогда

Изменение кинетической энергии  звеньев с постоянным приведенным моментом инерции
звеньев с постоянным приведенным моментом инерции  равно
равно

где  - кинетическая энергия звеньев, создающих переменную составляющую . По методу Н.И. Мерцалова, определяется приближенно по средней угловой скорости
- кинетическая энергия звеньев, создающих переменную составляющую . По методу Н.И. Мерцалова, определяется приближенно по средней угловой скорости  :
:
Далее из полученного за цикл массива значений  (рис. 1.9) находим максимальную
(рис. 1.9) находим максимальную  и минимальную
и минимальную  величины, используя которые, вычисляем максимальный перепад кинетической энергии:
величины, используя которые, вычисляем максимальный перепад кинетической энергии:
 |

Рис. 1.9
Тогда необходимая величина , при которой имеет место вращение звена приведения с заданным коэффициентом неравномерности d , равна
 где
где  (1.13)
(1.13)
Момент инерции маховика определяется как
где  - приведенный момент инерции всех вращающихся масс машины (ротора двигателя, зубчатых колес, кривошипа).
- приведенный момент инерции всех вращающихся масс машины (ротора двигателя, зубчатых колес, кривошипа).
Иногда величина может оказаться больше полученного значения . Это означает, что не требуется установки маховика. Реальный коэффициент неравномерности вращения в этом случае из (1.13) равен

|
из
5.00
|
Обсуждение в статье: Определение приведенных моментов сил сопротивления и движущих сил |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы