 |
Главная |


ОРГАНИЗАЦИЯ И ПОРЯДОК НАБЛЮДЕНИЯ
|
из
5.00
|
1.3.1. Неправильное использование или не использование РЛС для предупреждения столкновений является фактором, усугубляющим вину в случае столкновения судов.
1.3.2. При организации радиолокационного наблюдения учитывают:
а) район плавания, включая наличие навигационных опасностей, ограничивающих маневрирование, плавучих СНО, обычных путей движения судов и организации движения, возможность появления малых судов и т. п.;
б) допустимые значения дистанции и времени кратчайшего сближения, а также других критериев опасности столкновения;
в) линейные и временные элементы возможных маневров судна;
г) технические и эксплуатационные характеристики и ограничения судовых радиолокационных средств с учетом влияния на их изменение конкретных условий плавания.
1.3.3. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется непрерывно. При таком наблюдении эхо-сигнал цели будет обнаружен сразу же после его появления на экране.
1.3.4. Когда радиолокационное наблюдение не является непрерывным, цели могут быть обнаружены на значительно меньшем расстоянии или вовсе не обнаружены с помощью РЛС.
Суда с плохой отражающей способностью, если появление таких возможно в районе плавания, обнаруживаются на небольших расстояниях, и, очевидно, даже кратковременные отвлечения от экрана РЛС могут привести к тому, что такие суда не будут своевременно обнаружены.
Допустимый перерыв между наблюдениями за экраном РЛС зависит от района плавания, надежной дальности обнаружения вероятных объектов, скорости хода, взаимного положения и относительной скорости сближения судов.
1.3.5. Выбор шкал дальности для наблюдения:
а) Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8—16 миль) с периодическим просмотром окружающей обстановки на шкалах крупного масштаба (малой дальности).
б) Следует учитывать, что один и тот же эхо-сигнал лучше обнаруживается на шкалах мелкого масштаба (большой дальности), чем на шкалах крупного масштаба (малой дальности), ибо в мелком масштабе эхо-сигнал занимает меньшую площадь на экране, а яркость его больше.
в) В стесненных водах наблюдение рекомендуется вести, исходя из обстоятельств плавания, на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах.
г) Шкалы дальности 32 и 64 мили используются для определений места судна по высоким берегам. После обсервации необходимо сразу перейти на шкалы средней или малой дальности для продолжения наблюдения.
д) При использовании двух радиолокаторов благоразумным будет работа на каждом из них своего наблюдателя с распределением обязанностей между наблюдателями.
1.3.6. Выбор режимов индикации и ориентации изображения.
а) Решение о выборе того или иного режима индикации и ориентации изображения принимает капитан судна исходя из конкретных обстоятельств плавания.
б) В режиме относительного движения наиболее наглядно и просто оценивается опасность столкновения.
Получение численных значений элементов движения цели и данных для оценки ситуации и маневрирования в режиме относительного движения требует решения векторного треугольника скоростей (путей), следовательно, четкого векторного представления ситуации.
в) Режим истинного движения (ИД) имеется у многих судовых РЛС и всех САРП.
В режиме ИД быстрее выделяются движущиеся и неподвижные объекты, а также момент начала маневра цели курсом. В то же время в режиме ИД сложнее и дольше обработка информации для получения данных о степени опасности столкновения и обеспечения маневрирования.
г) Наибольшую точность измерения пеленга, связь радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «Север».
д) В режиме ориентации «Курс» изображение на экране РЛС соответствует картине, наблюдаемой с мостика.
1.3.7. Смену наблюдателей у радиолокатора следует производить в моменты, когда экран РЛС чист или когда окружающая обстановка проста.
1.3.8. Обнаружив в результате наблюдения, в том числе радиолокационного, другие суда (объекты), судоводитель должен в соответствии с Правилом 7 МППСС-72 оценить наличие опасности столкновения, используя для этой цели все имеющиеся средства.
1.3.9. Поскольку судовой радиолокатор имеет ряд ограничений, полностью оценить ситуацию можно только с помощью анализа первичной (необработанной) и вторичной (обработанной) информации.
Первичная радиолокационная информация позволяет заблаговременно, зачастую значительно раньше зрительного и слухового наблюдения, не только обнаружить другие суда (объекты), но и предварительно с достаточной для начальной стадии точностью выявить наличие опасности столкновения.
Вторичная радиолокационная информация, т. е. полученные в результате ручной или машинной обработки количественные данные о направлениях линий относительного движения (ЛОД), относительной скорости V0, дистанции кратчайшего сближения DKP, времени до момента кратчайшего сближения Ткр, курсе Кц и скорости Vц других судов (объектов), позволяет полностью оценить степень опасности столкновения.
Обработка радиолокационной информации рассмотрена в главе 2 данных Рекомендаций.
| 1.4. ТЕХНИКА ВЫПОЛНЕНИЯ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ | ||||||||||||||||||||||||||||||||||||||||||||
| 1.4.1 | Настройка РЛС | |||||||||||||||||||||||||||||||||||||||||||
| а) | обнаружение эхо-сигнала объекта при различных обстоятельствах в значительной степени зависит от настройки станции и, в частности, от правильной регулировки усиления приемника. Последнее требует практического опыта, приобретенного в морской обстановке; | |||||||||||||||||||||||||||||||||||||||||||
| б) | практикой работы с судовыми РЛС выработан определенный порядок настройки изображения, заключающийся в следующем. При выведенном усилении делают яркость экрана такой, чтобы линия развертки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими. Затем вводят усиление; | |||||||||||||||||||||||||||||||||||||||||||
| в) | лучшее положение ручки «УСИЛЕНИЕ» такое, при котором по всей площади экрана появляется слабый мерцающий фон шумов приемника. Такое положение соответствует максимальной чувствительности приемника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к потере обнаружения небольших объектов, дающие слабые эхо-сигналы. Чрезмерное усиление приводит к потере контраста изображение и затрудняет наблюдение; Судоводители часто практикуют уменьшение усиления для выделения сильных эхо-сигналов. Следует помнить, что делать это можно ненадолго, каждый раз восстанавливая нормальное усиление. Это же относится к периодам усиления при просмотре части экрана, замаскированной засветкой от сильных осадков. | |||||||||||||||||||||||||||||||||||||||||||
| г) | следует следить также за яркостью изображения. Слабая яркость затрудняет наблюдение, а чрезмерная - вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать; | |||||||||||||||||||||||||||||||||||||||||||
| д) | после регулировки яркости и усиления устанавливаются режим относительного или истинного движения; ориентация шкалы, изображения, шкала дальности, освещение азимутальной шкалы и счетчика дальности, яркость ПКД, линии курса и электронного визира. | |||||||||||||||||||||||||||||||||||||||||||
| 1.4.2. | Уменьшение влияния помех: | |||||||||||||||||||||||||||||||||||||||||||
| а) | при наличии засветки от морских волн применяются ВАРУ и устройство устранения помех от моря. Область сплошной засветки уменьшают до нескольких флюктуирующих точек, на фоне которых можно выделить эхо сигналы от объектов. Уменьшению засветки от волн помогает использование усиления, а также малой постоянной времени. При этом кроме сказанного выше об усилении, следует помнить, что одновременно с подавлением сигналов от волн подавляются и сигналы от малых объектов; | |||||||||||||||||||||||||||||||||||||||||||
| б) | интенсивность помех от морского волнения уменьшается при использовании импульсов меньшей длительности, которые обычно применяются на шкалах более крупного масштаба. Поэтому бывает целесообразным переход на использование шкалы с меньшей дальностью, если при этом сокращается длительность импульса. Потеря дальности наблюдения может быть возмещена сдвигом начала развертки, если это обеспечивается РЛС. Для более эффективной борьбы с помехами от морских волн используется диапазон 10 см, при котором интенсивность помех значительно меньше, чем в диапазоне 3,2 см. Однако в условиях мертвой зыби меньше помех в диапазоне 3,2см. | |||||||||||||||||||||||||||||||||||||||||||
| в) | при наличии помех от осадков рекомендуется использование помехозащитного устройства при одновременном усилении. Для большего ослабления помех от осадков целесообразно использование диапазона 10 см и импульсов меньшей длительности; | |||||||||||||||||||||||||||||||||||||||||||
| г) | ложные сигналы из-за боковых лепестков могут быть подавленны с помощью устройства "ПОМЕХИ ОТ МОРЯ" (ВАРУ). При этом следует помнить о кратковременности таких действий; | |||||||||||||||||||||||||||||||||||||||||||
| д) | действительным при многократном отражении от близких объектов является только первый эхо-сигнал. Остальные можно убрать усилением, чтобы убедится в том, где истинные, а где ложные эхо-сигналы. Ложные сигналы исчезают сами при увеличении дистанции или изменении взаимного ракурса объектов; | |||||||||||||||||||||||||||||||||||||||||||
| е) | ложные эхо-сигналы от берега иногда маскируют эхо-сигналы малых судов находящиеся в зоне помех. Поэтому необходимо внимательно следить за этой зоной, периодически уменьшая усиления приемника; | |||||||||||||||||||||||||||||||||||||||||||
| ж) | помехи от работающих РЛС представляют собой серии точек или линии, располагающиеся по всему экрану радиально либо в виде спирали. При каждом обороте антенны они меняют свое положение и легко отличаются от других эхо-сигналов. | |||||||||||||||||||||||||||||||||||||||||||
| 1.4.3. | Выполнение измерений пеленга и дистанции: | |||||||||||||||||||||||||||||||||||||||||||
| а) | все измерения должны выполняться на одной и той же шкале дальности, одним и тем же наблюдателем и одним и тем же приемом. Сначала рекомендуется измерять пеленг, затем сразу же расстояние; | |||||||||||||||||||||||||||||||||||||||||||
| б) | направление измеряется механическим или электронным визиром с точностью не ниже 0,5 град. Линия визира должна делить отметку цели пополам. При этом точность отсчета пеленга электронным визиром не зависит от смещения центра развертки во всех режимах. При использовании механического визира следует совместить центр развертки с центром визира с возможной точностью. Несовпадение центров увеличивает погрешность пеленга; | |||||||||||||||||||||||||||||||||||||||||||
| в) | расстояние измеряется с точностью до 0,1 мили совмещением ПКД с эхо-сигналом таким образом, чтобы наружный край ПКД совпал с внутренним краем отметки. При измерении расстояния электронным визиром устанавливается примерно на 0,5 мм в ближнюю к центру экрана кромку эхо-сигнала; | |||||||||||||||||||||||||||||||||||||||||||
| г) | при обнаружении нескольких эхо-сигналов измерения рекомендуется выполнять в одной и ток же последовательности через установленные интервалы времени, и каждый цикл измерений относить к одному времени, например к моменту измерения данных первой отметки; | |||||||||||||||||||||||||||||||||||||||||||
| д) | измерение пеленгов и дистанций может быть выполнено с помощью системы авто-сопровождения, данные которой обычно точнее полученных вручную; | |||||||||||||||||||||||||||||||||||||||||||
| е) | приближенное измерение расстояний может выполняться с помощью НКД и параллельных линий механического визира; | |||||||||||||||||||||||||||||||||||||||||||
| ж) | приближенное измерение направлений выполняется установкой, на глаз, одной из линий механического визира параллельно определяемому вектору со снятием отсчета по концу центральной линии с азимутальной шкалой. | |||||||||||||||||||||||||||||||||||||||||||
| 1.4.4. | Глазомерные определения ЛОД и Дкр: | |||||||||||||||||||||||||||||||||||||||||||
| а) | направление ЛОД и величина Дкр могут определяться глазомерно при первоначальном наблюдении объекта по следу послесвечения; | |||||||||||||||||||||||||||||||||||||||||||
| б) | контроль за перемещением эхо-сигнала одиночной цели может осуществляться сравнением ее текущего положения с визиром, установленным на эхо-сигнал цели при ее обнаружении. | |||||||||||||||||||||||||||||||||||||||||||
| ГЛАВА 2. ОБРАБОТКА РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ И МАНЕВРИРОВАНИЕ | ||||||||||||||||||||||||||||||||||||||||||||
| 2.1.ОБЩИЕ ПОЛОЖЕНИЯ | ||||||||||||||||||||||||||||||||||||||||||||
| 2.1.1. | Обработка радиолокационной информации ни в коем случае не должна приводить к ослаблению слухового, визуального и радиолокационного наблюдения. | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.2. | Обработка радиолокационной информации начинается с момента обнаружения цели на экране РЛС и заканчивается после полного расхождения с ней. | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.3. | Целью обработки информации является получение полных и точных данных для определения необходимости и выполнения маневра расхождения с другим судном или объектом, эхо-сигнал которого наблюдается на экране РЛС. | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.4. | Обработка радиолокационной информации включает: | |||||||||||||||||||||||||||||||||||||||||||
| Ø глазомерную оценку ситуации и определение степени опасности столкновения; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø радиолокационную прокладку (вручную или с помощью автоматизированных средств) для получения полных и точных данных о ситуации; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø вторичную радиолокационную информацию; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø полную оценку ситуации; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø выбор и обоснование манёвра для предупреждения столкновения; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø расчет манёвра; | ||||||||||||||||||||||||||||||||||||||||||||
| Ø запись результатов измерений и обработки в журналы, | ||||||||||||||||||||||||||||||||||||||||||||
| 2.1.5. | Основным режимом работы PЛC для получения и обработки радиолокационной информации является режим относительного движения (ОД). | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.6. | Режим ИД является дополнительным режимом. | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.7. | При оценке ситуации и степени опасности столкновения используются следующие основные критерии: радиолокационный пеленг на цель (РЛП) и тенденция его изменения; радиолокационная дистанция до цели Др и тенденция её изменения; Дкр; Ткр; ракурс цели (при наличии режима ИД); курс Кц и скорость Vц цели. | |||||||||||||||||||||||||||||||||||||||||||
| Кроме того при выборе манёвра используются: | ||||||||||||||||||||||||||||||||||||||||||||
| · Тупр - время упреждения - период между моментом последнего определения положения цели и условным моментом окончания выбранного манёвра; | ||||||||||||||||||||||||||||||||||||||||||||
| · Тпер - время до пересечения эхо-сигналом цели линии нашего курса или нашим судном курса цели; | ||||||||||||||||||||||||||||||||||||||||||||
| · Дзад - кратчайшая дистанция расхождения - выбранное судоводителем с учётом конкретных условий случая допустимое значение Дкр; | ||||||||||||||||||||||||||||||||||||||||||||
| · Трасх - время расхождения - расчётный период времени между моментом окончания предполагаемого маневра и условным моментом полного расхождения; | ||||||||||||||||||||||||||||||||||||||||||||
| · Дотх - дистанция отхода - расстояние, на которое сместится судно от линии первоначального курса в результате предполагаемого манёвра. | ||||||||||||||||||||||||||||||||||||||||||||
| 2.1.8. | Оценка и выбор критериев должны осуществляться с учётом МППСС-72 применительно к конкретным обстоятельствам плавания. | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.9. | Ни один из перечисленных критериев в отдельности не является определяющим при оценке ситуации и опасности столкновения. Получение достаточно полной и точной оценки даже простой ситуации требует учёта совокупности критериев в их взаимозависимости. Как показывает анализ причин столкновения, наиболее частой ошибкой судоводителей является оценка ситуации на основе неполных данных (например, только Дкр без Ткр). | |||||||||||||||||||||||||||||||||||||||||||
| 2.1.10. | Зависимости, которые следует установить при оценке степени опасности столкновения и расчете манёвра в результате обработки радиолокационной информации, для наглядности представлены на схеме (рис. 1). | |||||||||||||||||||||||||||||||||||||||||||


| ||||||||||||||||||||||||||||||||||||||||||||
| Рис.1 Схема оценки степени опасности столкновения. | ||||||||||||||||||||||||||||||||||||||||||||
| 2.2 ЗАКОНОМЕРНОСТИ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ. | ||||||||||||||||||||||||||||||||||||||||||||
| 2.2.1. | Обработка радиолокационной информации при использовании любых технических средств сводится к решению векторного треугольника скоростей. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.2. | Основным элементом векторного треугольника скоростей является вектор относительной скорости перемещения эхо-сигнала цели Vо, направление и величина которого обуслов-лены векторами скоростей нашего судна Vн и судна цели Vц, т.е. Vо=Vц-Vн. В свою очередь, вектор относительной скорости определяет направление ЛОД и величину относительной скорости Vо. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.3. | В геометрическом плане безопасность расхождения с целью достигается таким разворотом ЛОД за счет изменения вектора относительной скорости, в результате которого Дкрстанет не менее заданной величины, т.е. Дкр больше или равно Дзад. Поскольку вектор скорости цели от нас не зависит, изменение вектора относительной скорости может быть достигнуто только изменением вектора нашего судна, т.е. манёвром курсом и/или скоростью. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.4. | Знание закономерностей перемещения эхо-сигналов целей по ЛОД и изменений векторов скорости нашего судна или судна-цели используется при оценке ситуации по первичной радиолокационной информации, при полной оценке ситуации в результате ручной или автоматизированной обработки радиолокационных данных, при выборе, расчёте и осуществлении манёвра для расхождения. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.5 | Более четкому пониманию ситуации на экране РЛС, работающей в режиме относительного движения, способствует систематизированная схема перемещений эхо-сигналов целей. Все возможные случаи перемещений эхо-сигналов целей по ЛОД сведены в три вида. На рисунках, иллюстрирующих эти случаи, для ясности геометрических представлений все изменения элементов движения судов считаются выполненными мгновенно, т.е. начало и конец манёвра сведены в одну упреждённую точку, соответствующую условному моменту времени окончания манёвра. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.6. | ПЕРВЫЙ ВИД: эхо-сигнал перемещается параллельно курсу нашего судна (рис. 2). | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 2. Параллельное перемещение эхо-сигнала | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 1: относительная скорость равна сумме скоростей нашего судна и цели (Vо = Vн + Vц) - эхо-сигнал ВСТРЕЧНОГО СУДНА (рис.2, судно А) | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 2: относительная скорость равна разности скоростей нашего судна и цели (Vо = Vн - Vц) - эхо-сигнал ДОГОНЯЕМОГО СУДНА (рис.2, судно Б) | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 3: относительная скорость равна разности скоростей цели и нашего судна (Vо = Vц - Vн) - эхо-сигнал ДОГОНЯЮЩЕГО НАС СУДНА (ОБГОНЯЮЩЕГО) (рис.2, судно В) | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 4: относительная скорость равна скорости нашего судна (Vо = Vн) и эхо-сигнал перемещается от носа к корме - эхо-сигнал неподвижной цели относительно воды (рис.2, судно Г) | ||||||||||||||||||||||||||||||||||||||||||||
| Все случаи перемещения эхо-сигналов первого вида характеризуются следующими закономерностями: | ||||||||||||||||||||||||||||||||||||||||||||
| а) | при изменении скоростей судов параллельность перемещения эхо-сигналов курсовой черте сохраняется (рис. 3); | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 3. Изменение скорости судов | ||||||||||||||||||||||||||||||||||||||||||||
| б) | при изменении курса нашим судном след послесвечения разворачивается для наблюдателя в сторону, противоположную повороту (рис. 4); | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 4. Изменение курса нашего судна | ||||||||||||||||||||||||||||||||||||||||||||
| в) | разворот следа послесвечения, если наше судно не маневрировало, указывает на изменение курса целью в ту же сторону (рис. 5); | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 5. Разворот следов послесвечения | ||||||||||||||||||||||||||||||||||||||||||||
| г) | эхо-сигнал от неподвижной цели (относительно воды) всегда перемещается параллельно линии нашего курса при всех его изменениях (рис. 6). | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 6. Перемещение эхо-сигнала неподвижной цели при изменении нашего курса | ||||||||||||||||||||||||||||||||||||||||||||
| Если при неизменных курсе и скорости нашего судна эхо-сигнал неподвижной прежде цели начал перемещаться не параллельно нашей курсовой черте - это указывает на начало движения цели курсом непараллельным нашему (рис. 7. судно Б) | ||||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 7. Начало движения | ||||||||||||||||||||||||||||||||||||||||||||
| 2.2.7. | ВТОРОЙ ВИД: эхо-сигнал перемещается не параллельно курсовой черте нашего судна. | |||||||||||||||||||||||||||||||||||||||||||
| Случай 1: эхо-сигнал перемещается по линии, проходящей через начало развертки, указывая на реальную опасность столкновения. | ||||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 8. Тенденция изменения направления следов послесвечения при маневрировании других судов | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 2: эхо-сигнал перемещается по линии, пересекающей наш курс, т.е. наблюдаемое судно пересекает наш курс. | ||||||||||||||||||||||||||||||||||||||||||||
| Случай 3: эхо-сигнал перемещается по линии, проходящей по корме нашего судна, т.е. наше судно пересекло или будет пересекать курс наблюдаемого судна. | ||||||||||||||||||||||||||||||||||||||||||||
| Во всех случаях второго вида: | ||||||||||||||||||||||||||||||||||||||||||||
| а) | обнаружив глазомерно изменение направления и/или скорости перемещения эхо-сигнала, нельзя сделать однозначный вывод о виде маневра цели из-за сложности закономерностей. Изменение целью курса или скорости можно определить только с помощью радиолокационной прокладки (рис. 8). | |||||||||||||||||||||||||||||||||||||||||||
| б) | разворот нашего судна в сторону эхо-сигнала цели (рис.9) | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| рис.9. | ||||||||||||||||||||||||||||||||||||||||||||
| Тенденция изменения направления следов послесвечения при изменении курса нашего судна приводит к изменению направления следа послесвечения от кормы к носу нашего судна (строго говоря, эта простая закономерность действует только в случаях перемещения эхо-сигнала к началу развертки с носовых курсовых углов). В остальных случаях существуют более сложные закономерности, последствиями которых на практике можно пренебречь. | ||||||||||||||||||||||||||||||||||||||||||||
| в) | Уменьшение нашей скорости (рис. 10) приводит к изменению направления следа послесвечения от кормы к носу нашего судна. | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 10. Тенденция изменений следов послесвечения при уменьшении скорости нашего судна. | ||||||||||||||||||||||||||||||||||||||||||||
| г) | Увеличение нашей скорости (рис. 11) приводит к развороту следа послесвечения от носа к корме нашего судна. | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 11. Тенденция изменений следов послесвечения при увеличении скорости нашего судна. | ||||||||||||||||||||||||||||||||||||||||||||
| д) | Отворот нашего судна от эхо-сигнала цели (рис. 12) вызывает сложное изменение направления следа послесвечения, не позволяющее глазомерно оценить эффективность результатов манёвра. | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис.12.Тенденция изменений направлений следов послесвечения при отвороте нашего судна от эхо-сигнала цели | ||||||||||||||||||||||||||||||||||||||||||||
| 2.2.8. | ТРЕТИЙ ВИД: один случай, когда эхо-сигнал цели не перемещается по экрану РЛС, пеленг на цель и дистанция до неё не изменяются, след послесвечения отсутствует, относительная скорость равна нулю (Vо = 0). Перечисленные признаки указывают на судно – «сателлит», курс и скорость которого совпадают с нашими (рис. 13). | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 13. Судно – «сателлит» | ||||||||||||||||||||||||||||||||||||||||||||
| Особенности вида: | ||||||||||||||||||||||||||||||||||||||||||||
| а) | Появление следа послесвечения, параллельно курсовой черте нашего судна, может быть вызвано изменением скорости любого или обоих судов (рис. 13А); | |||||||||||||||||||||||||||||||||||||||||||
| б) | Появление следа послесвечения, непараллельного курсовой черте нашего судна, может быть вызвано изменением курса или курса и скорости любого или обоих судов (рис. 13Б); | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.9. | Если в конкретной ситуации мы имеем дело с простыми закономерностями и можем однозначно предсказать тенденцию изменения следа послесвечения от нашего маневра или вид маневра цели, мы вправе считать, что имеем достаточно надежную информацию для оценки ситуации и степени опасности столкновения, а также для маневрирования. В случаях сложных закономерностей для полной оценки ситуации необходима радиолокационная прокладка. | |||||||||||||||||||||||||||||||||||||||||||
| 2.2.10. | В процессе радиолокационного наблюдения ситуация на экране РЛС постоянно изменяется, в первую очередь из-за маневрирования судов. Качество наблюдения и глазомерной оценки ситуации определяется своевременностью обнаружения перехода одного вида или случая перемещения эхо-сигнала в другой и соответствующего изменения закономерностей. | |||||||||||||||||||||||||||||||||||||||||||
| 2.3. ОЦЕНКА СИТУАЦИИ ПО ПЕРВИЧНОЙ ИНФОРМАЦИИ. | ||||||||||||||||||||||||||||||||||||||||||||
| 2.3.1. | Обязательным этапом обработки радиолокационной информации является глазомерная оценка ситуации. Она осуществляется после обнаружения эхо-сигнала другого судна (объекта) на экране РЛС, предшествует радиолокационной прокладке и не прекращается до полного расхождения. | |||||||||||||||||||||||||||||||||||||||||||
| 2.3.2. | При большом количестве эхо-сигналов других судов (объектов), превышающем возможности их обработки вручную, глазомерная оценка ситуации позволяет отобрать для радиолокационной прокладки опасные и потенциально опасные цели. | |||||||||||||||||||||||||||||||||||||||||||
| 2.3.3. | ОПАСНОЙ ЦЕЛЬЮ принято называть другое судно (объект) перемещение эхо-сигнала которого в соответствии с установленными критериями опасности вызывает необходимость выполнения маневра для расхождения. Под ПОТЕНЦИАЛЬНО ОПАСНОЙ ЦЕЛЬЮ подразумевают другое судно, перемещение эхо-сигнала которого в соответствии с установленными критериями опасности в данный момент не требует маневра для расхождения. Но такой маневр может стать необходимым при дальнейшем сближении, при неблагоприятном маневре другого судна или после выполнения нашего маневра для расхождения с опасными целями. | |||||||||||||||||||||||||||||||||||||||||||
| 2.3.4. | Для определения реальной опасности цели по первичной информации направление следа послесвечения, тенденции изменения пеленга и дистанции, Дкр, Ткр и другие параметры сравнивают с критериями опасности: | |||||||||||||||||||||||||||||||||||||||||||
| а) | эхо-сигналы, обнаруженные впереди траверза, требуют большего внимания, так как среди них более вероятны сигналы опасных целей, время сближения с которыми мало из-за большой относительной скорости; | |||||||||||||||||||||||||||||||||||||||||||
| б) | в большинстве ситуаций, чем ближе эхо-сигнал, тем цель опаснее, так же как чем ближе направление следа послесвечения к началу развертки, тем цель опаснее; | |||||||||||||||||||||||||||||||||||||||||||
| в) | если направление следа послесвечения проходит на Дкр меньше установленной вели-чины, степень опасности цели определяется на основе известных закономерностей перемещения эхо-сигнала с учетом возможных маневров нашего судна. | |||||||||||||||||||||||||||||||||||||||||||
| Так, при перемещении эхо-сигналов параллельно линии нашего курса более опасной будет цель, эхо-сигнал которой пройдет в той стороне от начала развертки, в которую возможен отворот нашего судна (рис. 14). | ||||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 14. Определение наиболее опасной цели. | ||||||||||||||||||||||||||||||||||||||||||||
| При перемещении эхо-сигналов не параллельно линии нашего курса степень опасности цели будет зависеть также от возможного изменения нашей скорости (рис.15). | ||||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 15. Определение наиболее опасной цели. | ||||||||||||||||||||||||||||||||||||||||||||
| г) | величина Ткр помогает правильно оценить развитие ситуации во времени с тем, чтобы действовать заблаговременно. В ситуации на рис.16, если ориентироваться только на дистанции до целей, можно сделать неправильный вывод о большей опасности цели А в сравнении с целью Б, так как цель А ближе. Анализ ситуации с учетом Ткр показывает истинную картину: цель А является потенциально опасной, так как Ткр = 32 мин и с маневром на расхождение можно повременить. Цель Б (Ткр = 14мин) - опасное судно, требуется незамедлительное маневрирование для расхождения с ним. | |||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 16 | ||||||||||||||||||||||||||||||||||||||||||||
| 2.4. РАДИОЛОКАЦИОННАЯ ПРОКЛАДКА. | ||||||||||||||||||||||||||||||||||||||||||||
| 2.4.1. | Радиолокационная прокладка (ручная или автоматизированная) представляет собой графоаналитический метод обработки радиолокационной информации при решении задач расхождения судов. Различают истинную и относительную радиолокационные прокладки. | |||||||||||||||||||||||||||||||||||||||||||
| 2.4.2. | Истинная прокладка обычно выполняется на навигационной карте. От счислимых мест своего судна откладывают измеренные пеленг и дистанций цели, получая ее одномоментные местоположения. По ним определяют курс и скорость цели, а также путем более сложных построений Дкр и Ткр для оценки степени опасности столкновения. | |||||||||||||||||||||||||||||||||||||||||||
| 2.4.3. | Относительная прокладка выполняется на радиолокационном маневренном планшете, на накладном зеркальном планшете, которым оборудованы некоторые модели РЛС, а также во всех САРП (в САРП, как правило, в сочетании с истинной прокладкой). | |||||||||||||||||||||||||||||||||||||||||||
| 2.4.4. | Относительная прокладка выполняется следующим образом: | |||||||||||||||||||||||||||||||||||||||||||
| а) | на маневренном планшете наносится начальная ситуация (рис. 17): | |||||||||||||||||||||||||||||||||||||||||||
| · положение цели (целей) на начальный момент времени по первым измерениям пеленга и дистанции; | ||||||||||||||||||||||||||||||||||||||||||||
| · положение цели (целей) через выбранный интервал времени (обычно 3 или 6 мин) по вторым измерениям пеленга и дистанции и, если позволяют обстоятельства; | ||||||||||||||||||||||||||||||||||||||||||||
| · положение цели (целей) через тот же интервал времени по третьим измерениям пеленга и дистанции (последние измерения должны предупредить промах); | ||||||||||||||||||||||||||||||||||||||||||||

| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 17. Радиолокационная прокладка | ||||||||||||||||||||||||||||||||||||||||||||
| б) | параллельно с нанесением начальной ситуации начинают обработку радиолокационных измерений на планшете: | |||||||||||||||||||||||||||||||||||||||||||
| · уже после получения первого положения цели - точки 1 наносят вектор нашей скорости Vн за соответствующий период времени, | ||||||||||||||||||||||||||||||||||||||||||||
| · через точки 1-2-3 после их нанесения проводят ЛОД цели. Соединяют точки 1-3, получая вектор относительной скорости Vо - основной информационный элемент, | ||||||||||||||||||||||||||||||||||||||||||||
| · соединив начало вектора нашей скорости с точкой 3 , определяют вектор скорости цели Vц, т.е. завершают решение векторного треугольника (векторы Vн, Vо и Vц должны быть за одинаковый интервал времени), | ||||||||||||||||||||||||||||||||||||||||||||
| в) | получают данные для оценки ситуации: | |||||||||||||||||||||||||||||||||||||||||||
| Дкр определяют по длине перпендикуляра из центра планшета на ЛОД, | ||||||||||||||||||||||||||||||||||||||||||||
| Ткр рассчитывают, откладывая по ЛОД отрезки равные Vо, так как они соответствуют интервалу времени 1-3, | ||||||||||||||||||||||||||||||||||||||||||||
| если ЛОД проходит у нас по носу, определяют точку пересечения c целью нашего курса, а если ЛОД проходит у нас по корме - точку пересечения нашим судном курса цели (из центра планшета проводят линию, параллельную Vц до пересечения с ЛОД), | ||||||||||||||||||||||||||||||||||||||||||||
| Тпер рассчитывают аналогично Ткр до точки пересечения курса, | ||||||||||||||||||||||||||||||||||||||||||||
| курс цели Kц определяют по направлению вектора ее скорости, а скорость цели Vц - по величине вектора Vц. | ||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||
| г) | Получив необходимые данные и используя линейные и временные факторы опасности (см.схему на рис.1), оценивают ситуацию: определяют, имеется ли реальная или потенциальная опасность столкновения с каждой целью, и, если опасность существует, переходят к выбору и обоснованию маневра. На этом этапе должно быть определено, с кем следует расходиться, что для этого нужно сделать и когда выполнять маневр. Выбор и обоснование маневра будут рассмотрены ниже. Пока же достаточно отметить, что при этом учитывают условия и обстоятельства конкретного случая, требования МППСС-72, закономерности перемещения эхо-сигналов на экране РЛС и маневренные элементы своего судна; | |||||||||||||||||||||||||||||||||||||||||||
| д) | для расчета выбранного маневра (по судну «Б» на рис. 18): | |||||||||||||||||||||||||||||||||||||||||||
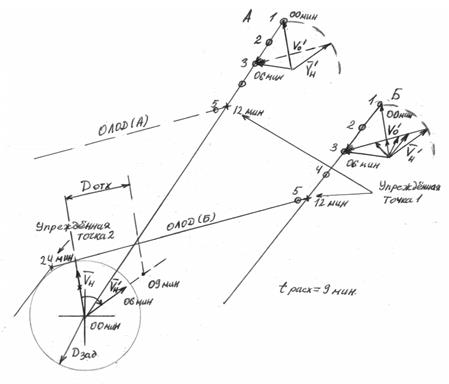
| ||||||||||||||||||||||||||||||||||||||||||||
| Рис. 18. Продолжение прокладки. | ||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||
| наносят на ЛОД упреждающую точку 1, соответствующую условному моменту окончания маневра (12 мин); | ||||||||||||||||||||||||||||||||||||||||||||
| проводят окружность радиусом заданной дистанции кратчайшего сближения Дзад; | ||||||||||||||||||||||||||||||||||||||||||||
| прокладывают ожидаемую линию относительного движения цели (ОЛОД), которая представляет собой касательную к окружности Дзад, проведенную из упреждающей т. 1; | ||||||||||||||||||||||||||||||||||||||||||||
| из точки 3 векторного треугольника начальной ситуации проводят новое направление вектора Vо - оно всегда соответствует направлению ОЛОД - и делают на нем засечку величиной Vн определяя точку начала нового вектора относительной скорости Vо, новое положение вектора Vн, а так же точное значение угла отворота, если выбран маневр изменением курса. | ||||||||||||||||||||||||||||||||||||||||||||
| Если же выбрано изменение скорости (уменьшение), новое значение вектора Vн определится отрезком Vн до пересечения этого вектора с вектором Vо'. Из рис. 18 видно, что возможен и комбинированный маневр: из центра планшета проводят новый вектор Vн' одновременно зачеркивая, что бы не путаться, старый вектор Vн. | ||||||||||||||||||||||||||||||||||||||||||||
| е) | пригодность рассчитанной величины маневра для расхождения с другими целями на безопасной дистанции проверяется (на рис.18 по судну «А») следующим образом: | |||||||||||||||||||||||||||||||||||||||||||
| прокладывается новое значение Vн' в векторном треугольнике каждой цели и упрежденную точку на всех ЛОД. | ||||||||||||||||||||||||||||||||||||||||||||
| определяет новое значение Vо’. | ||||||||||||||||||||||||||||||||||||||||||||
| через упрежденную точку параллельно Vо' проводят ОЛОД и оценивают величину дистанции кратчайшего сближения, которая должна быть не меньше Дзад. | ||||||||||||||||||||||||||||||||||||||||||||
| ж) | рассчитывают время расхождения Трасх. и дистанцию отхода от первоначального пути Дотх, используя новое значение Vо. | |||||||||||||||||||||||||||||||||||||||||||
| находят упреждающую точку 2 условного момента возвращения на первоначальный путь следования (21 мин.), для чего проводят касательную к окружности Дзад, параллельно ЛОД, и точку пересечения этой касательной с ОЛОД, которая и есть упрежденная точка 2. | ||||||||||||||||||||||||||||||||||||||||||||
| рассчитывают Трасх, откладывая величину V'о по ОЛОД до учрежденной точки 2. | ||||||||||||||||||||||||||||||||||||||||||||
| определяют Дотх, для чего по линии нового курса Vн’ откладывают расстояние, которое пройдет наше судно за время Тpaсx. Из конечной точки этого плавания опускают перпендикуляр на линию первоначального курса - он и есть Дотх.; | ||||||||||||||||||||||||||||||||||||||||||||
| з) | рассчитывают момент начала маневра с учетом маневренных элементов своего судна - вычитают из условного момента упрежденной точки (п.2.4.4д) 2/3 известного из Табли
Популярное: Как выбрать специалиста по управлению гостиницей: Понятно, что управление гостиницей невозможно без специальных знаний. Соответственно, важна квалификация... Почему стероиды повышают давление?: Основных причин три... Как распознать напряжение: Говоря о мышечном напряжении, мы в первую очередь имеем в виду мускулы, прикрепленные к костям ...  ©2015-2024 megaobuchalka.ru Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. (2057)
|
Почему 1285321 студент выбрали МегаОбучалку... Система поиска информации Мобильная версия сайта Удобная навигация Нет шокирующей рекламы |
(0.009 сек.)