 |
Главная |


Моделирование задающих воздействий
|
из
5.00
|
К типовым задающим воздействиям электропривода и автоматики относятся ступенчатое и линейно-нарастающее воздействия. Задающие или внешние воздействия сгруппированы в библиотеку внешних воздействий Source Library.
Задающее ступенчатое воздействие моделируется блоком Step Function. Настройка ступенчатой функции определяется тремя параметрами:
· Amplitude (V) – амплитуда выходного сигнала;
· Start time (s) – момент переключения от одного уровня к другому;
· Offset (V) – значение сигнала в начальный момент времени.
Окно настройки блока Step Function представлено на рисунке 3.9, а форма данного задающего сигнала представлена на рисунке 3.10.

| 
|
| Рисунок 3.9 – Внешний вид и окно настройки блока Step Function | |
| |
| Рисунок 3.10 – Выходной сигнал блока Step Function |
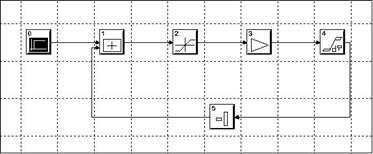
Модель линейно нарастающего задающего воздействия – задатчика интенсивности представлена на рисунке 3.11,а. В состав его модели входят блоки Step Function, Limit, Gain, Integrator и Negate. Блоки Gain и Integrator реализуют интегратор с регулируемой постоянной времени, которую задаёт блок Gain. Максимальное значение выходного сигнала определяет блок Limit. Блок Step Function формирует входной скачек задания.
|
| а) модель задатчика интенсивности в System View |
|
| б) форма выходного сигнала задатчика интенсивности |
| Рисунок 3.11. Линейно нарастающее задающее воздействие |
В таблице 3.3 представлены значения параметров указанных блоков для случая: время нарастания 2 секунды, установившееся значение 10В.
Таблица 3.3 – Значения параметров блоков
| Наименование блока | Значения параметра блока |
| Step Function | Offset (V) = 0 В Amplitude (V) = 10 В Start Time (s) = 0 с |

| |
| Limit | Input Max (V) = 0 В Output Max (V) = 10 В |

| |
| Gain | Gain = 1/2 |

| |
| Integrator | Initial Condition (V) = 0 В |

|
Моделирование нагрузок электропривода
К главным возмущениям систем электропривода относятся нагрузки, которые делятся на два вида: не зависящие и зависящие от величины скорости электропривода. К первому виду нагрузок относятся нагрузки активного и реактивного характера, а ко второму нагрузка типа «вязкое терние» и нагрузка вентиляторного характера.
Нагрузка активного характера обусловлена силой тяжести, которая действует на все тела и направлена вертикально вниз. Моделирование такой нагрузки выполняется с помощью блока Step Function. Механическая характеристика активной нагрузки представлена на рисунке 3.12,а, а параметры блока Step Function в таблице 3.4.
Нагрузка реактивного характера «сухое трение» обусловлена силой трения, которая всегда действует противоположно направлению движения. Моделирование такой нагрузки выполняется с помощью блока Limit и Dead Band. Скорость двигателя подаётся на вход блока Dead Band, а с него на блок Limit. Тогда при выборе параметров, как указано в таблице 3.4, знак момента сопротивления на выходе блока будет зависеть от скорости. Механическая характеристика реактивной нагрузки представлена на рисунке 3.12,б, а параметры блоков Limit и Dead Band в таблице 3.4.
| 
|
| а) активная | б) реактивная |
| Рисунок 3.12 – Нагрузки электропривода независящие от скорости движения |
Нагрузка вентиляторного характера имеет место на валу двигателей турбомеханизмов: вентиляторов, дымососов, центробежных насосов. Механическая характеристика вентиляторной нагрузки представлена на рисунке 3.13. Момент сопротивления вентиляторного характера описывается следующей эмпирической зависимостью:
 , (3.1)
, (3.1)
где M0 – момент сопротивления, обусловленный силами трения;
MН – момент сопротивления на валу двигателя;
wН – номинальная скорость двигателя.
|
| Рисунок 3.13 – Механическая характеристика вентиляторной нагрузки |
Для моделирования вентиляторной нагрузки применяется блок Polynomial из библиотеки нелинейных элементов, который реализует алгебраический полином пятого порядка:
 . (3.2)
. (3.2)
Внешний вид блокаPolynomial и окно настройки параметров представлено на рисунке 3.14. а параметры блока Polynomial в таблице 3.4.

| 
|
| Рисунок 3.14 – Окно настройки полинома и внешний вид блока Polynomial |
Таблица 3.4 – Значения параметров блоков для моделирования нагрузок
| Наименование блока | Значения параметра блока |
| Step Function | Offset (V) = 0 В Amplitude (V) = 10 В Start Time (s) = 0 с |
|
| |
| Limit | Input Max (V) = 0 В Output Max (V) = 10 В |
|
| |
| Dead Band | Dead Band (V) = (0,5 – 3)% от рабочей скорости |

| |
| Polynomial | x^5 Coeff, x^4 Coeff, x^3 Coeff, x^1 Coeff = 0;
 . .
|

|
Моделирование регуляторов электропривода и систем управления
Замкнутой системой регулирования называется такая система, которая обеспечивает изменение регулируемой величины по требуемому закону. В такой системе используются канал задающей информации и канал обратной связи, по которому в систему управления поступает информация о текущем состоянии регулируемой величины.
Регулятор – это устройство, вырабатывающее на основании сигнала ошибки сигнал управления такой величины и знака, чтобы минимизировать ошибку регулирования. Все регуляторы можно условно подразделить на непрерывные, релейные (позиционные) и цифровые.
К непрерывным регуляторам, применяемым в системах автоматизации и управления электроприводами, относятся: пропорциональный (П – регулятор), интегральный (И – регулятор), пропорционально-интегральный (ПИ – регулятор) и пропорционально-интегрально-дифференциальный (ПИД – регулятор) регуляторы. Однако, вследствие более постой технической реализации наибольшее применение получили первые три типа регуляторов.
1. П – регулятор (пропорциональный)
Передаточная функция регулятора имеет вид:
 , (3.3)
, (3.3)
где k – коэффициент усиления регулятора.
2. И – регулятор (интегральный)
Передаточная функция регулятора имеет вид:
 , (3.4)
, (3.4)
где TИ – интегральная постоянная времени регулятора;
 – интегральный коэффициент передачи регулятора.
– интегральный коэффициент передачи регулятора.
3. ПИ – регулятор (пропорционально-интегральный)
Передаточная функция регулятора имеет вид:
 , (3.5)
, (3.5)
где k – коэффициент передачи регулятора;
T – постоянная времени регулятора;
TИ – интегральная постоянная времени регулятора.
Передаточные функции (3.3) – (3.5) представляют собой математическое описание регуляторов без учета насыщения, моделирование которых было рассмотрено в предыдущем разделе.
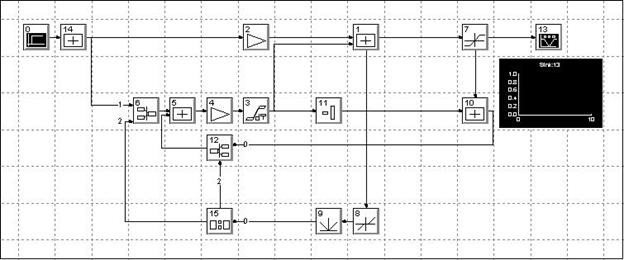
Выходной сигнал реального регулятора всегда ограничен уровнем питающего напряжения, разрядностью системы или допустимым уровнем выходного сигнала. На рисунке 3.15 представлена структурная схема модели ПИ – регулятора с насыщением, на основании которой легко получить П или И регулятор.
|
| Рисунок 3.15 – Структурная схема модели ПИ – регулятора в System View |
Модель (рис 3.15) имеет переменную структуру и её параметры различны при работе на линейном участке и в зоне ограничения. Параметры блоков, входящих в состав модели для различных типов регуляторов представлены в таблице 3.5.
Таблица 3.5 – Значения параметров блоков для моделирования регуляторов
| Блок, номер | Назначение | Значение параметров блока |
| Gain (2) | Пропорциональный Коэффициент усиления | Gain = kП |

| ||
| Gain (4) | Интегральный коэффициент усиления | Gain = 1/TИ |
|
| ||
| Integrator (3) | Интегратор | Initial Condition (V) = 0 В |
|
| ||
| Switch (6, 12) | Ключ, изменяющий структуру модели | Thershold = 0,5 |

| ||
| Negate (11) | Инвертор | нет |

| ||
| Limit (7) | Максимальное значение выходного сигнала | Input Max (V) = UВЫХ max Output Max (V) = UВЫХ max |
|
| ||
| Compare (15) | Компаратор (управляющий элемент) | True Output (V) = 1 В False Output (V) = 0 В Select Comparison “ = ” |

| ||
| Dead Band (8) | Зона нечувствительности (управляющий элемент) | Dead Band (V) = UВЫХ max |

| ||
| Full Rectify (9) | Блок выделения модуля (управляющий элемент) | Zero Point (V) = 0 |

|
Анализ результатов моделирования
Для просмотра и анализа результатов моделирования в System View имеются специальные блоки, объединенные в библиотеке элементов анализа Sink Library. Для вывода на экран или в окно анализа (рис. 3.16) какого-либо сигнала достаточно присоединить в требуемой точке модели один из элементов анализа. Блоки анализа и их характеристики сведены в таблицу 3.6.
Таблица 3.6 – Блоки анализа и их характеристики
| Обозначение блока | Характеристика блока |

| Analysis формирует вывод данных в окно анализа, не отображая их в рабочем окне |

| System View обеспечивает вывод данных в окно анализа, а также их просмотр в рабочем окне |

| External File организует запись данных во внешнем текстовом файле. Возможен просмотр графиков в окне анализа |

| Data List формирует выходные данные в виде списка. Возможен просмотр графиков в окне анализа |

| Real Time отображает просмотр данных в рабочем окне в реальном масштабе времени |

| Final Value отображает в рабочем окне установившееся значение выходной величины |
|
| Рисунок 3.16 – Окно анализа |
Выбор шага интегрирования
Важным вопросом при моделировании является правильный выбор шага интегрирования. Задание шага интегрирования, начального и конечного времени переходного процесса осуществляется в SV при помощи окна задания системного времени (рис 3.17).
Параметры окна задания системного времени
1. Start time – начальное время переходного процесса в секундах. Обычно при моделировании принимается равным нулю.
2. Stop time – конечное время переходного процесса в секундах. Определяется, исходя из динамических свойств моделируемой системы.
3. Sample rate – частота расчёта в герцах. Рекомендуется выбирать на порядок больше максимальной частоты в системе:  .
.
4. Time spacing – шаг интегрирования в секундах:  ; значение обратное частоте расчёта.
; значение обратное частоте расчёта.
5. No. of Samples – число точек, в которых вычисляется переходной процесс.
6. No. of System Loops – организует повторный цикл моделирования. Если установлен ключ Reset system on Loop, то после каждого цикла сигналы на выходах блоков сбрасываются в нуль, иначе начальным значением последующего цикла моделирования становится конечное значение предыдущего цикла. Ключ Pause on Loop позволяет организовать паузу между циклами моделирования.
|
| Рисунок 3.17 – Окно задания параметров системного времени |
4. ЛАБОРАТОРНАЯ РАБОТА № 1
|
из
5.00
|
Обсуждение в статье: Моделирование задающих воздействий |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы