 |
Главная |


Моделирование типовых динамических звеньев ТАР
|
из
5.00
|
При моделировании по структурным схемам все элементы электромеханической системы представляются типовыми динамическими звеньями ТАР. К основным динамическим звеньям относятся: усилительное, интегрирующее, апериодическое и форсирующее звенья. Блоки для моделирования типовых динамических звеньев размещены в библиотеке линейных операторов Operator Library. Представление элементов системы типовыми звеньями и их модели в SV отражает таблица 3.1.
Усилительное звено реализуется с помощью элемента Gain (рис. 3.2. а). Он имеет один параметр - Gain (коэффициент усиления), который задаётся в виде безразмерной величины или в децибелах (в лабораторных работах рекомендуется использовать безразмерный коэффициент, он устанавливается по умолчанию). Для задания отрицательного коэффициента перед числовым значением ставится знак «минус». Усилитель с коэффициентом, равным минус единице, моделируется элементом Negate.
Таблица 3.1 – Моделирование типовых динамических звеньев
| Звено | Передаточная функция | Наименование блока SV | Применение |
| Усилительное | 
|
 
| П – регулятор, безынерционный датчик или преобразователь. |
| Gain | |||
 
| |||
| Negate |
Продолжение табл. 3.1.
| Интегрирующее | 
|
  
| И – регулятор, механическая часть системы ЭП, редуктор. |
| Gain и Integrator | |||
| Апериодическое | 
|
 
| Силовой преобразователь, электрическая часть системы ЭП |
| Linear Sys | |||
| Форсирующее | 
|

| ПИ – регулятор, ПИД – регулятор |
| Linear Sys | |||
 
| |||
| PID |
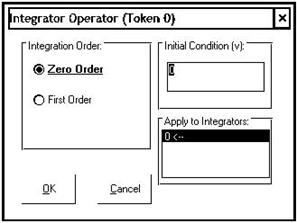
Для моделирования интегратора последовательно соединяются элементы Gain и Integrator. Блок Integrator (рис 3.2. б) имеет один параметр - Initial Condition (начальные условия – значение выходного сигнала интегратора в начальный момент времени; по умолчанию установлен ноль).

| 
|
| а) | б) |
| Рисунок 3.2 – Окна настройки блоков Gain и Integrator |
Инерционные звенья моделируются элементом Linear Sys – одним из наиболее мощных элементов SV. Он позволяет моделировать динамические звенья ТАР по их передаточной функции или частотной характеристике до четвёртого порядка включительно. При выборе элемента Linear Sys из библиотеки появляется окно определения типа элемента (рис. 3.4), в котором нужно выбрать кнопку Laplase. В результате появляется окно задания передаточной функции (рис. 3.5). В поле заготовки передаточной функции записываются постоянные времени и коэффициент усиления элемента.
При моделировании регуляторов или корректирующих устройств (без насыщения), представляющих форсирующие звенья, используются элементы Linear Sys или PID. Методика настройки параметров элемента Linear Sys такая же, как и при определении инерционного звена. Элемент PID (рис 3.3) предназначен для моделирования пропорционально-интегрально-дифференциального (ПИД – регулятора). Элемент PID имеет три параметра:
· Proportional Gain – коэффициент усиления пропорциональной составляющей;
· Integrator Gain – коэффициент усиления интегральной составляющей;
· Derivative Gain - коэффициент усиления дифференциальной составляющей.

|
| Рисунок 3.3 – Окно настройки блока PID |

| |||
| Рисунок 3.4 – Окно определения типа элемента Linear Sys | |||
 
| |||
| Рисунок 3.5 – Окно задания передаточной функции элемента |

|
из
5.00
|
Обсуждение в статье: Моделирование типовых динамических звеньев ТАР |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы