 |
Главная |


Нормальное приращение для наклонного слоя
|
из
5.00
|
На рис.3.16 показан один наклонный слой. Мы хотим рассчитать время пробега от источника S до точки D на отражающей поверхности и до сейсмоприемника G. Для наклонного слоя средняя точка М больше не представляет собой вертикальную проекцию глубинной точки на поверхность. Термины выборка ОГТ и выборка ОСТ равнозначны только для горизонтально-слоистого разреза. Когда имеется наклон отражающей поверхности (ОП) или изменение скорости в латеральном направлении, две выборки различаются между собой. Средняя точка М остается общей для всех пар источник – сейсмоприемник в пределах выборки независимо от наклона. Глубинная точка D различается для каждой пары источник – сейсмоприемник в выборке ОСТ, зарегистрированной по наклонной ОП. Используя геометрические построения, показанные на рис.3.16, Levin (1971) вывел следующее уравнение полного времени пробега в двух измерениях для слоя, наклоненного под углом f:
| t2(x) = t2(0) + x2cos2f/v2 | (3.7) |
Это снова уравнение гиперболы, но сейчас скорость нормального приращения определяется как скорость в среде, деленная на косинус угла наклона:
| vNMO = v/cosf | (3.8) |
Для надлежащего суммирования сигнала от наклонной поверхности требуется скорость, которая больше скорости в среде над ОП. Levin распространил свои исследования на наклонную плоскую поверхность в трехмерном пространстве, как показано на рис.3.17. В этом случае скорость нормального приращения зависит не только от наклона поверхности, но и от азимута линии, соединяющей источник и сейсмоприемник:
| vNMO = v/(1 – sin2 f cos2 q)1/2 | (3.9) |
Азимут q - это угол между направлением структурного падения и направлением профиля (рис.3.17).
Кажущийся угол падения определяется как:
| sin f? = sin f cos q | (3.10) |
Используя это определение, скорость нормального приращения, задают уравнением (3.8), можно переписать как:
| vNMO = v/ cos f? | (3.11) |
Это уравнение идентично уравнению (3.8) для, наклонного слоя в двумерном пространстве. Исключением является то, что уравнение (3.11) относится к кажущемуся наклону, а уравнение (3.8) – к истинному наклону.
Levin (1971) построил отношение vNMO/v [уравнение (3.9)] в функции наклона и азимута. Результаты представлены на рис.3.18. Горизонтальная ось – азимут. Когда профиль направлен по падению, азимут равен нулю; когда профиль направлен по простиранию, азимут равен 90°. Отношение vNMO/v принимает большое значение, когда профиль отстрелян в направлении структурного падения или близко к нему. Levin (1971) построил также отношение vNMO/v по линии падения в функции малых углов структурного падения. Результат представлен на рис.3.19. Когда наклон не превышает 15°, отношение vNMO/v близко к единице. Для угла, равного 15°, разность между vNMO и v равна 4%.
В заключении отметим, что скорость нормального приращения для наклонного слоя (в двух или трех измерениях) зависит от угла наклона. Горизонтальный слой с высокой скоростью может давать такое же приращение, как наклонный слой с низкой скорост. Это показано на рис.3.20.
3.2.4 Нормальное приращение для нескольких слоев с произвольными наклонами
На рис.3.21 приведены двумерные геометрические построения для разреза, состоящего из ряда слоев, каждый из которых характеризуется произвольным наклоном. Мы хотим рассчитать время пробега от источника S до глубинной точки D и до сейсмоприемника G; М –средняя точка. Луч ОСТ от средней точки М падает на наклонную поверхность по нормали (D?), причем D? - это не то же самое, что D. Вертикальное время – это полное время пробега по лучу от М к D?. Hubral и Krey (1980) вывели выражение для времени пробега t(x) вдоль SDC:

| (3.12) |
где скорость нормального приращения равна:

| (3.13) |
Углы определены на рис.3.21. Для одного наклонного слоя уравнение (3.13) сводится к уравнению (3.8). Для горизонтально-слоистого разреза уравнение (3.13) сводится к уравнению (3.4). Пока углы наклона являются незначительными, а расстановка – короткой, уравнение пробега можно аппроксимировать гиперболой [уравнение (3.5)], а скорость, требуемая для поправки за нормальное приращение, можно аппроксимировать функцией среднеквадратичной скорости [уравнение (3.4)].
В таблице 3.3 приводятся скорости нормального приращения, полученные по различным моделям разреза.
После аппроксимации короткой расстановкой и малым наклоном нормальное приращение является гиперболическим для всех случаев:
| t2(x) = t2(0) + x2/v2NMO | (3.14) |
Следует различать скорость гиперболического нормального приращения и скорость суммирования, которая позволяет оптимальным образом суммировать трассы в выборке ОСТ. Гиперболическая форма используется для определения лучшего пути суммирования:
| t2st(x) = t2st(0) + x2/v2st | (3.15) |
где vst – скорость, обеспечивающая наилучшую аппроксимацию гиперболой кривой времени пробега tst(x) на выборке ОСТ в пределах длины расстановки. Эта гипербола не обязательно представляет собой гиперболу короткой расстановки, подразумеваемую уравнением (3.14).
 Рис.3.15 Выбор оптимального обнуления. Начиная с выборки ОСТ, исправленной за нормальное приращение (изображение а), получаем зону обнуления (b). Крайняя правая трасса в этой выборке – такая же, что и на первоначальной выборке (а). Вторая справа – сумма двух ближайших трасс первоначальной выборки. Крайняя левая трасса – сумма полной кратности, полученная по первоначальной выборке. Участок над пунктирной линией на изображении (b) – зона обнуления. Изображение (с) – результат неудачного выбора обнуления, основанный на селекции из первоначальной выборки (а). Сравните (b) и (с).
Рис.3.15 Выбор оптимального обнуления. Начиная с выборки ОСТ, исправленной за нормальное приращение (изображение а), получаем зону обнуления (b). Крайняя правая трасса в этой выборке – такая же, что и на первоначальной выборке (а). Вторая справа – сумма двух ближайших трасс первоначальной выборки. Крайняя левая трасса – сумма полной кратности, полученная по первоначальной выборке. Участок над пунктирной линией на изображении (b) – зона обнуления. Изображение (с) – результат неудачного выбора обнуления, основанный на селекции из первоначальной выборки (а). Сравните (b) и (с).
|  Рис.3.16 Геометрические построения для нормального приращения одной наклонной отражающей поверхности [см. уравнение (3.7)].
Рис.3.16 Геометрические построения для нормального приращения одной наклонной отражающей поверхности [см. уравнение (3.7)].
 Рис.3.17 Геометрические построения для наклонной плоскости поверхности, используемые при выводе скорости нормального приращения в трехмерном пространстве [см. уравнение (3.9)], где f = угол наклона, q - азимут угла (Levin, 1971).
Рис.3.17 Геометрические построения для наклонной плоскости поверхности, используемые при выводе скорости нормального приращения в трехмерном пространстве [см. уравнение (3.9)], где f = угол наклона, q - азимут угла (Levin, 1971).
|
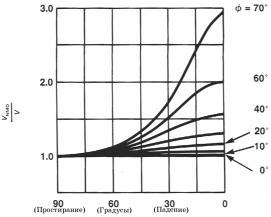 Рис.3.18 Графическое представление уравнения приращения в 3-D пространстве, выведенное по рис.3.17, где j = угол падения, q = азимут. Скорость приращения идентична скорости в среде, если направление отстрела совпадает с простиранием (q = 90°). Наибольшее различие между скоростью приращения и скоростью в среде имеет место в направлении падения (q = 0°) при больших углах падения (Levin, 1971).
Рис.3.18 Графическое представление уравнения приращения в 3-D пространстве, выведенное по рис.3.17, где j = угол падения, q = азимут. Скорость приращения идентична скорости в среде, если направление отстрела совпадает с простиранием (q = 90°). Наибольшее различие между скоростью приращения и скоростью в среде имеет место в направлении падения (q = 0°) при больших углах падения (Levin, 1971).
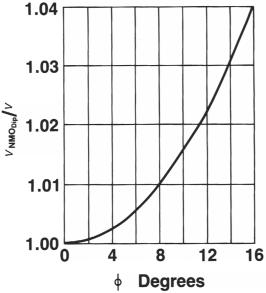 Рис.3.19 Графическое представление уравнения приращения в 3-D пространстве, выведенное по рис.3.17 для нулевого азимута (q = 0°) и малых углов наклона (j = 0°-15°) (Levin, 1971).
Рис.3.19 Графическое представление уравнения приращения в 3-D пространстве, выведенное по рис.3.17 для нулевого азимута (q = 0°) и малых углов наклона (j = 0°-15°) (Levin, 1971).
|  Рис.3.20 Приращение для низкоскоростного сигнала (а) больше, чем для высокоскоростного сигнала (b). Приращение для низкоскоростного сигнала вызванного наклонной поверхностью (с), может быть таким же, как для высокоскоростного сигнала, вызванного горизонтальной поверхностью (b). Эти наблюдения являются прямым следствием уравнения (3.7).
Рис.3.20 Приращение для низкоскоростного сигнала (а) больше, чем для высокоскоростного сигнала (b). Приращение для низкоскоростного сигнала вызванного наклонной поверхностью (с), может быть таким же, как для высокоскоростного сигнала, вызванного горизонтальной поверхностью (b). Эти наблюдения являются прямым следствием уравнения (3.7).
 Рис.3.21 Геометрические построения для приращения в случае наклонной границы раздела в модели разреза с произвольно наклонными слоями [см. уравнение (3.12)] (Hubral и Krey, 1980).
Рис.3.21 Геометрические построения для приращения в случае наклонной границы раздела в модели разреза с произвольно наклонными слоями [см. уравнение (3.12)] (Hubral и Krey, 1980).
|
| Таблица 3.3 Скорости нормального приращения для различных моделей разреза. |  Рис.3.22 Уравнение для скорости приращения выведено в предположении гиперболического годографа, соответствующего короткой расстановке [ур. (3.14)]. С другой стороны, скорость суммирования выведена по гиперболическому годографу, обеспечивающему наилучшее совпадение по всей длине расстановки [ур. (3.15)]. Здесь (а) – действительное время пробега; (b) – гипербола обеспечивающая наилучшее совпадение в диапазоне выносов ОА; (с) – годограф, соответствующий короткой расстановке (Hubral и Krey, 1980).
Рис.3.22 Уравнение для скорости приращения выведено в предположении гиперболического годографа, соответствующего короткой расстановке [ур. (3.14)]. С другой стороны, скорость суммирования выведена по гиперболическому годографу, обеспечивающему наилучшее совпадение по всей длине расстановки [ур. (3.15)]. Здесь (а) – действительное время пробега; (b) – гипербола обеспечивающая наилучшее совпадение в диапазоне выносов ОА; (с) – годограф, соответствующий короткой расстановке (Hubral и Krey, 1980).
| |
| Модель | Скорость нормального приращения | |
| Один горизонтальный слой | Скорость в среде над отражающей поверхностью. | |
| Горизонтально-слоистый разрез | Функция среднеквадратичной скорости, при условии короткой расстановки. | |
| Один наклонный слой | Скорость в среде, деленная на косинус угла наклона. | |
| Многослойный разрез с произвольными наклонами | Функция среднеквадратичной скорости при условии короткой расстановки и малых углов наклона. | |
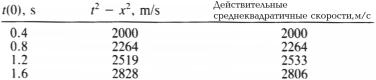
Таблица 3.4 Оцененные скорости суммирования и действи-
тельные скорости для синтетической модели на рис.3.23
Оцененные скорости суммирования
|
При превышении определенной величины выноса разность становится значительной (см. рис.3.22). Наблюденное полное вертикальное время ОС = t(0) в уравнении (3.14) может отличаться от полного вертикального времени ОВ = tst (0), которое ассоциировано с гиперболой, обеспечивающей наилучшее совпадение [ур. (3.15)]. Это имеет место, например, в случае, если в слоях залегающих выше отражающей поверхности, существует некоторая неоднородность. Разность между скоростью суммирования vst и скоростью нормального приращения vNMO называется смещением длины расстановки (Al-Chalabi, 1973; Hubral и Krey, 1980). Из уравнений (3.14) и (3.15) видно, что чем меньше расстановки, тем ближе годограф оптимального суммирования к годографу при короткой расстановке и, следовательно, тем меньше разность между vst и vNMO.
СКОРОСТНОЙ АНАЛИЗ
Нормальное приращение – это основа для определения скоростей по сейсмическим данным. Рассчитанные скорости, в свою очередь, могут быть использованы для поправки за нормальное приращение, чтобы выровнять отражения в трассах выборки ОСТ перед суммированием. По уравнению (3.15) мы можем разработать практический способ определения скорости суммирования, используя выборку ОСТ. Уравнение (3.15) описывает линию на поверхности t2(x), x2. Наклон линии равен 1/v2st, а величина, при которой происходит пересечение х = 0, равна t(0). Синтетическая выборка на рис.3.23 была выведена из скоростной модели на рис.3.11. На правом изображении рис.3.23 показаны выбранные времена пробега четырех сигналов при различных выносах в плоскости (t2, x2). Чтобы найти скорость суммирования для данного сигнала, точки, соответствующие этому сигналу, соединены прямой линией. Обратная величина наклона (углового коэффициента) – квадрат скорости суммирования. На практике для определения угловых коэффициентов можно использовать аппроксимацию методом наименьших квадратов. Сравнение рассчитанных скоростей суммирования и действительных среднеквадратичных скоростей дано в таблице 3.4.
Скоростной анализ t2 – x2 – это надежный способ оценки скоростей суммирования. Точность метода зависит от отношения сигнал помеха, которое влияет на количество пикинга. На рис.3.23 сопоставляются результаты применения спектра скоростей (центральное изображение); этот подход рассмотрен в данном разделе далее. Пример реальных данных показан на рис.3.24. Скорости, оцененные по анализу t2 – x2, обозначены на спектре треугольниками. Соответствие между подходом t2 – x2 и выбором по спектру скоростей вполне удовлетворительное.
Claerbout (1978) предложил способ определения интервальных скоростей вручную по выборкам ОСТ. Основная идея этого способа показана на рис.3.25. Сначала изменяем угловой коэффициент касательных к верхнему и нижнему отражениям интервала, представляющего интерес (угловой коэффициент 1). Затем соединяем две точки касания и измеряем угловой коэффициент полученной линии (угловой коэффициент 2). Интервальная скорость равна квадратному корню произведения угловых коэффициентов 1 и 2. Точность этого метода зависит в первую очередь от отношения сигнал/помеха.

|
Рис.3.23 Скоростной анализ (t2 – x2), примененный к синтетической выборке, которая получена по скоростной функции, показанной на рис.3.11. Центральное изображение – скоростной спектр, основанный на уравнении (3.19).
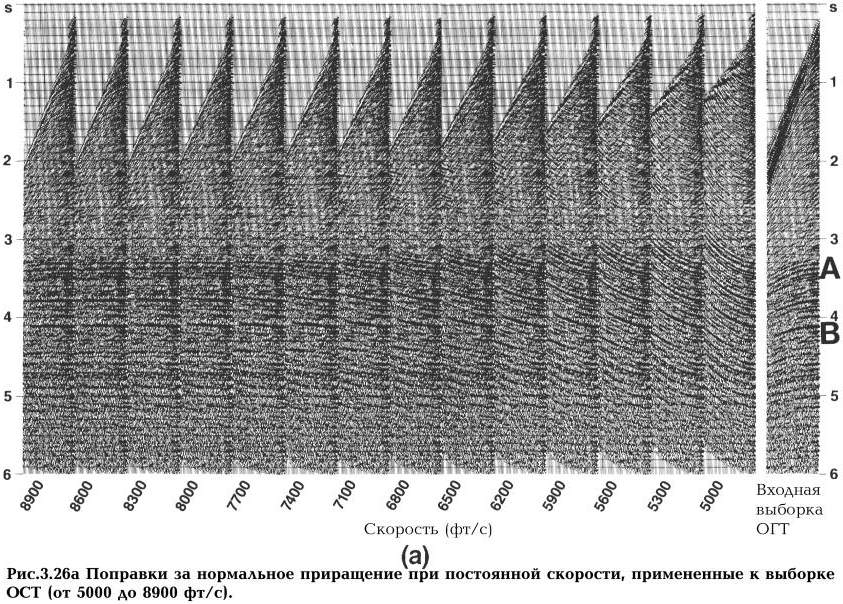
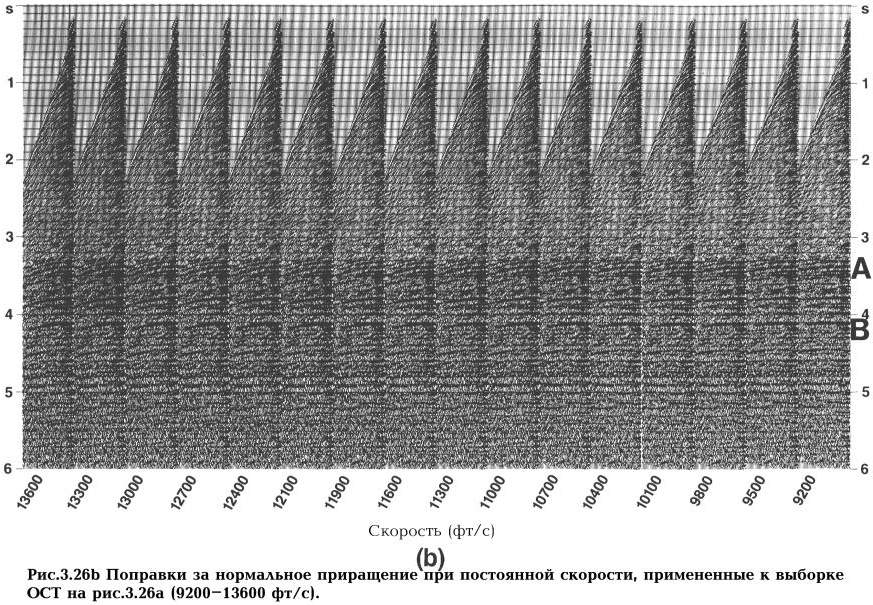
Метод разверток постоянной скорости выборки ОСТ – это альтернативная методика скоростного анализа. На рис.3.26 показана выборка ОСТ, исправленная за нормальное приращение несколько раз с применением постоянных скоростей от 5000 до 13600фт/с. Выборки, исправленные за нормальное приращение, отображены в ряд. Рассмотрим нормальное приращение для сигнала А. Отметим, что этот сигнал перекорректирован при малых скоростях и недокорректирован при больших скоростях. Сигнал является плоским на выборке, которая соответствует скорости 8300фт/с; следовательно, 8300фт/с – это скорость суммирования для сигнала А. Сигнал В является плоским на выборке, соответствующей 8900фт/с. Продолжая таким образом, мы можем построить скоростную функцию, которая подходит для поправки за нормальное приращение этой выборки.
Получить достоверную скоростную функцию необходимо для того, чтобы добиться суммы сигнала лучшего качества. Следовательно, скорости суммирования часто оцениваются по данным, суммированным по нескольким постоянным скоростям на основе амплитуды и выдержанности суммированного сигнала. Этот подход показан на рис.3.27. Здесь часть профиля, содержащая 24 выборки ОСТ (обычно количество выборок может изменяться от 24 до 48, но сюда может входить и весь профиль) исправлена за нормальное приращение и суммирована с несколькими постоянными скоростями. Полученные в результате 24-трассные суммы ОСТ были отображены в виде панели, где скорости суммирования возрастают справа налево. Скорости суммирования пикированы непосредственно с панели суммы постоянной скорости (CVS) путем выбора скорости, которая дает наилучший суммарный отклик на выбранном времени. Обратите внимание на когерентные помехи, присутствующие в данных. Сигнал на времени 3.6с суммируется в широком диапазоне скоростей. Это свидетельствует о снижении разрешающей способности оценок скоростей для сигналов, соответствующих большим глубинам. Причина этой проблемы заключается в том, что в общем случае нормальное приращение увеличивается с глубиной.
Следует быть осторожнее при выборе постоянных скоростей, используемых в вышеописанном методе CVS. Кроме того, что в разрезе скорости изменяются в широких пределах, следует учитывать два обстоятельства: (1) диапазон скоростей, необходимых для суммирования данных и (2) шаг между пробными скоростями суммирования. При выборе диапазона скоростей нужно обратить особое внимание на тот факт, что сигналы от наклонных отражающих поверхностей и полезные сигналы, смещенные от плоскости наблюдения, могут иметь аномально высокие скорости суммирования. При выборе шага между постоянными скоростями следует помнить, что основой для оценки скорости является приращение, а не скорость. Следовательно, предпочтительнее делать развертки приращений равных DtNMO, нежели равных vNMO. Это предотвращает избыточное квантование высокоскоростных сигналов и недостаточное квантование низкоскоростных сигналов. Хороший способ выбора D(DtNMO) – чтобы разность приращения между соседними пробными скоростями при максимальном суммарном выносе составляла приблизительно 1/3 видимого периода данных (Doherty, 1986, личное сообщение). Неглубокие данные характеризуются короткими максимальными выносами из-за обнуления, а глубинные данные имеют большой видимый период. Следовательно, можно уменьшить количество пробных скоростей суммирования.
Метод CVS особенно полезен на участках со сложным строением (см упражнение 3.7), позволяя интерпретатору непосредственно выбирать сумму с лучшей выдержанностью сигнала (часто скорости суммирования сами по себе имеют минимальное значение). Суммы постоянных скоростей часто содержат много трасс ОСТ и иногда состоят из всего профиля.

|
Рис.3.24 Скоростной анализ (t2 –x2), примененный к выборке ОСТ. Треугольники на скоростном спектре (среднее изображение) получены на основании уравнения (3.19) и представляют скорости, полученные по угловым коэффициентам линий, показанных на графике справа.
Метод спектра скоростей рассмотрен в следующем разделе. В отличии от метода CVS, он основан на взаимной корреляции трасс в выборке ОСТ, а не на выдержанности суммированных сигналов в латеральном направлении. Поэтому данный метод больше подходит для данных, где имеется проблема кратных отражений и является менее подходящим для случая сложного строения.
Спектр скоростей
Входная выборка на рис.3.28а содержит один годограф отражения от плоской границы. Средняя скорость над ОП равна 3000м/с. Предположим, что эта выборка несколько раз исправлена за нормальное приращение и суммирована с применением нескольких постоянных скоростей от 2000 до 4300м/с. На рис.3.28b показаны результирующие суммарные трассы для каждой скорости на плоскости «скорость – полное вертикальное время». Это изображение называется спектром скоростей (Taner и Koehler, 1969). Мы преобразовали данные из области «вынос – полное время пробега» (рис.3.28а) в области «скорость суммирования – полное вертикальное время» (рис.3.28b).
Максимальная суммированная амплитуда имеет место при скорости 3000м/с. Это скорость, которая должна быть использована для суммирования сигнала во входной выборке ОСТ. Низкоамплитудная горизонтальная полоска на спектре скоростей обусловлена вкладом со стороны малых удалений, тогда как высокоамплитудная область вызвана вкладом со стороны всего множества выносов (Sherwood и Poe, 1972). Следовательно, дальние выносы необходимы на спектре скоростей для улучшения разрешающей способности.
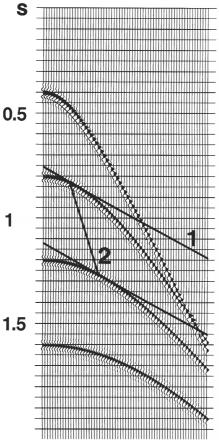 Рис.3.25 Интервал скорости между двумя отражениями равны корню квадратному из величины наклона, измеренной, как показано выше. Это та же самая сейсмограмма, что и на рис.3.10а. Расстояние между трассами равно 50м, наклон 1 = 3150/0.43, наклон 2 = 550/0.44, и , таким образом, интервальная скорость между отражениями регистрирующихся на времени 0.8с и 1.2с равна 3026м/с.
Рис.3.25 Интервал скорости между двумя отражениями равны корню квадратному из величины наклона, измеренной, как показано выше. Это та же самая сейсмограмма, что и на рис.3.10а. Расстояние между трассами равно 50м, наклон 1 = 3150/0.43, наклон 2 = 550/0.44, и , таким образом, интервальная скорость между отражениями регистрирующихся на времени 0.8с и 1.2с равна 3026м/с.
| Выборка ОСТ, ассоциированная со слоистой моделью, показана на рис.3.29а. Исходя из спектра скоростей, выбраны следующие значения для функции скоростей суммирования (рис.3.28b): 2700, 2800, 3000м/с. Эти величины соответствуют неглубоким, средним по глубине и глубинным отражениям. Спектр скоростей может не только представить функцию скоростей суммирования, но и позволяет различать первичные и кратные отражения (Раздел 8.2).
Величина, изображенная на спектрах скоростей на рис.3.28b и 3.29b – это суммарная амплитуда. При малом отношении сигнал/помеха суммарная амплитуда может не иметь достаточную величину. Цель скоростного анализа состоит в получении точек, которые соответствуют лучшей когерентности сигнала вдоль гиперболической траектории по всей длине расстановки выборки ОСТ. Neidell и Taner (1971) обобщили различные типы мер когерентности, которые могут быть использованы в качестве признаков при расчете спектров скоростей.
Рассмотрим выборку ОСТ с одним отражением (рис.3.30). Суммарная амплитуда определяется как:
 (3.16)
где fi,t(i) – величина амплитуды на i-трассе при полном времени пробега t(i). (3.16)
где fi,t(i) – величина амплитуды на i-трассе при полном времени пробега t(i).
|
Здесь М – количество трасс в выборке ОСТ. Полное время пробега t(i) располагается вдоль пробной гиперболы суммирования:
| t(i) = [t2(0) + x2i/v2st]1/2 | (3.17) |
Нормализованная суммарная амплитуда определяется как

| (3.18) |
|
|

|
Рис.3.27 Суммы при постоянных скоростях 24 выборок ОСТ (5000 – 13000 фт/с).
 Рис.3.28 Определение положения оси выносов на оси скорости. Каждая трасса в выборке [v, t = t(0)] (b) – это сумма трасс в выборке ОСТ (а), где используются поправки за нормальное приращение при постоянной скорости.
Рис.3.28 Определение положения оси выносов на оси скорости. Каждая трасса в выборке [v, t = t(0)] (b) – это сумма трасс в выборке ОСТ (а), где используются поправки за нормальное приращение при постоянной скорости.
|  Рис.3.29 Определение положения оси выносов на оси скорости. Каждая трасса в выборке [v, t = t(0)] (b) – это сумма трасс в выборке ОСТ (а), где используются поправки за нормальное приращение при постоянной скорости.
Рис.3.29 Определение положения оси выносов на оси скорости. Каждая трасса в выборке [v, t = t(0)] (b) – это сумма трасс в выборке ОСТ (а), где используются поправки за нормальное приращение при постоянной скорости.
|
NS изменяется в пределах от 0 до 1. Уравнение (3.18)подразумевает, что когерентность, как определено здесь, - это нормализованная суммарная амплитуда.
Другая величина, используемая в расчетах спектров скоростей – это сумма ненормированной взаимной корреляции во временном окне, которое следует гиперболе пробега суммирования по выборке ОСТ. Выражение для суммы ненормированной взаимной корреляции имеет вид:
| (3.19) |
где СС можно интерпретировать как полуразность выходной энергии суммы и входной энергии. Нормированная форма СС – это другой признак, который часто используется в расчетах скоростных спектров и имеет вид:
| (3.20) |
Сумма взаимной корреляции, нормированная по энергии, определяется как:

| (3.21) |
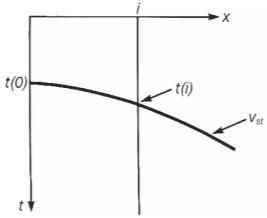 Рис.3.30 Суммарная амплитуда. Амплитуды fi,t(i) по гиперболе, обеспечивающей наилучшее совпадение [ур. (3.17)], определенной оптимальной скоростью суммирования, складываются с целью получения суммарной амплитуды st [ур. (3.16)].
Рис.3.30 Суммарная амплитуда. Амплитуды fi,t(i) по гиперболе, обеспечивающей наилучшее совпадение [ур. (3.17)], определенной оптимальной скоростью суммирования, складываются с целью получения суммарной амплитуды st [ур. (3.16)].
| ЕСС изменяется в пределе – [1/(M-1)] < ECC ? 1. Наконец, подобие, которое представляет собой нормированное отношение выходной энергии ко входной энергии, имеет вид:
 (3.22)
Следующее выражение показывает отношение NE к ECC: (3.22)
Следующее выражение показывает отношение NE к ECC:
 (3.23) (3.23)
|
NE изменяется от 0 до 1.
В таблице 3.5 приведены значения признаков, определенных уравнением (3.18) – (3.22) для специального случая двукратной выборки ОСТ, где вторая трасса представляет собой масштабированную версию первой трассы:

|


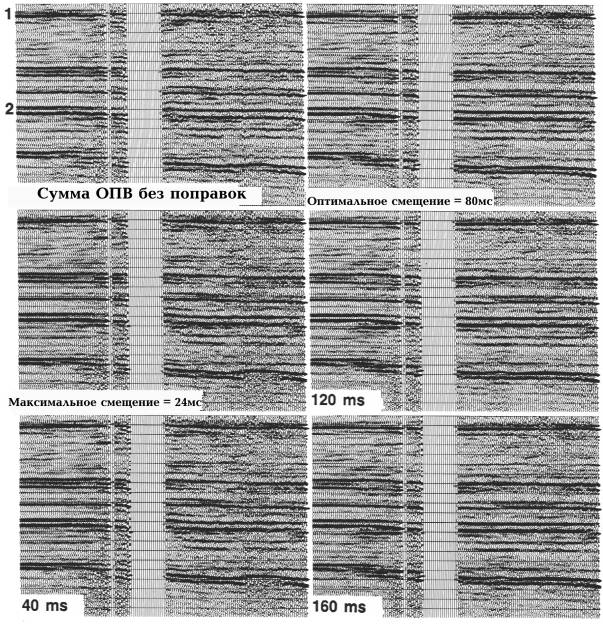
Рис.3.73 Тест максимально допустимого смещения. Выборки ОСТ после коррекции остаточной статики; используются пять различных максимально допустимых смещений. На рис.3.76 показаны суммы ОСТ.
|
Рис.3.74 Диагностика для тестов максимально допустимых смещений (рис.3.73); показаны данные, суммированные по ОПВ.

|
Рис.3.75 Диагностика для тестов максимально допустимых смещений (рис.3.73); показаны данные, суммированные по ОТП.

|
Рис.3.76 Тест максимально допустимого смещения: суммы ОСТ после коррекции остаточной статики, использующие пять различных максимально допустимых смещений.

|
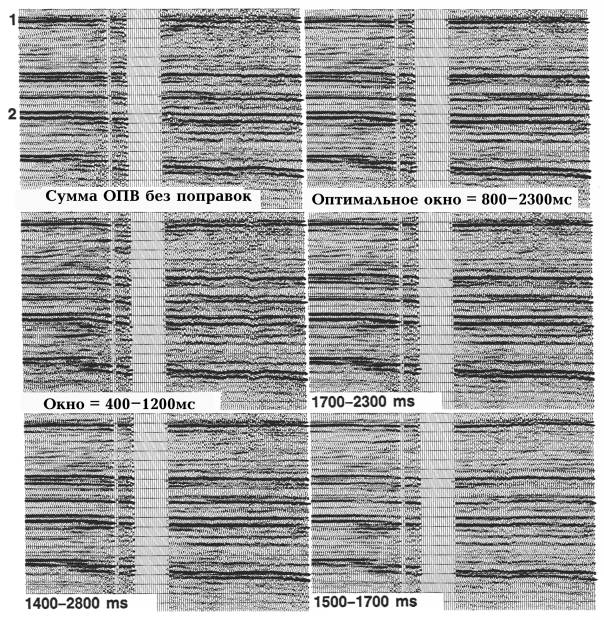
Рис.3.77 Тест окна корреляции: выборки ОСТ после коррекции остаточной статики, использующие пять различных окон корреляции.
|
Рис.3.78 Диагностика для тестов окна корреляции (рис.3.77); показаны данные суммированные по ОПВ.

|
Рис.3.79 Диагностика для тестов окна корреляции (рис.3.77); показаны данные суммированные по ОТП.
|
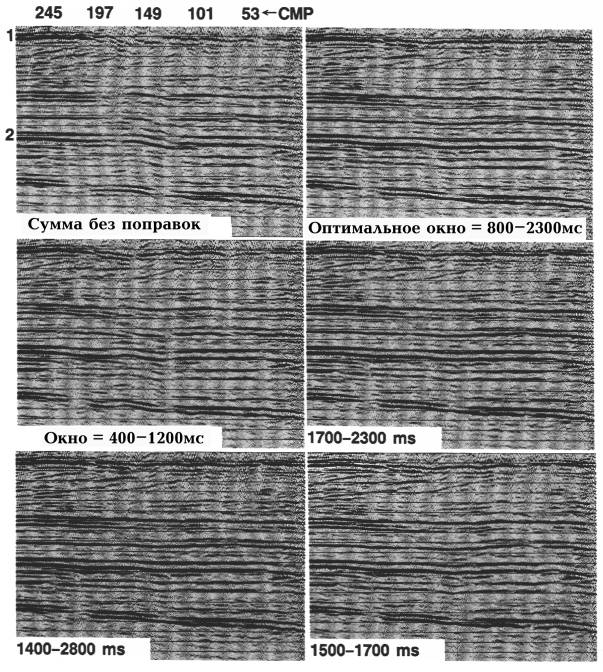
Рис.3.80 Тест окна корреляции: суммы ОСТ после коррекции остаточной статики, использующие пять различных окон корреляции.

|
Рис.3.81 Тест окна корреляции: выборки ОСТ после коррекции остаточной статики, использующие пять различных окон корреляции.

|
Рис.3.82 Диагностика для тестов окна корреляции (рис.3.81); показаны данные, суммированные по ОПВ.

|
Рис.3.83 Диагностика для тестов окна корреляции (рис.3.81); показаны данные, суммированные по ОТП.

|
Рис.3.84 Тест окна корреляции: суммы ОСТ после коррекции остаточной статики, использующиеся пять различных окон корреляции.

|
Рис.3.85 Опорные трассы (внизу) и решения статики, связанной с точками взрыва и приема (вверху) для смещения 80мс и окна 400 – 1200мс.
 Рис.3.86 Набор синтетических данных. Дополнительно к статике, связанной с точками взрыва и приема, учитывающей изменение поверхностных условий и к структурному элементу, учитывающему изменение условий разреза, к выборкам ОСТ, использованным в модели 2 на рис.3.67, введены смещения остаточного приращения.
Рис.3.86 Набор синтетических данных. Дополнительно к статике, связанной с точками взрыва и приема, учитывающей изменение поверхностных условий и к структурному элементу, учитывающему изменение условий разреза, к выборкам ОСТ, использованным в модели 2 на рис.3.67, введены смещения остаточного приращения.
|  Рис.3.87 Коррекция остаточной статики, примененная к данным модели 3 (рис.3.86).
Рис.3.87 Коррекция остаточной статики, примененная к данным модели 3 (рис.3.86).
|
|
из
5.00
|
Обсуждение в статье: Нормальное приращение для наклонного слоя |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы