 |
Главная |


Ковшовые конвейеры и подъемники непрерывного действия 3 страница
|
из
5.00
|
где g = 9,81 м/с2 - ускорение свободного падения; п -число ветвей стропа; a - угол наклона ветви стропа к вертикали.
С увеличением угла а усилие S возрастает. Стандарт (ГОСТ 25573-82) ограничивает этот угол косвенно: между любыми двумя ветвями стропа угол не должен превышать 90°. Для четы-рехветвьевого стропа указанный угол измеряется по диагонально расположенным ветвям. Для стропов с уравнительными блоками (см. рис. 6.12) его измеряют между осями подвески уравнительных блоков, а также между ветвями каната, огибающего каждый уравнительный блок.
Основными параметрами канатных стропов является их номинальная грузоподъемность (от 0,32 до 32 т) и длина (от 0,9 до 25 м). Под номинальной грузоподъемностью здесь понимают допустимую массу груза, которую способен поднять строп при предельном разводе его ветвей в 90°. При фактических углах ниже этой нормы грузоподъемность стропа увеличивается. Однако воспользоваться этим преимуществом можно лишь в случае достаточной высоты подъема крюка, так как с уменьшением указанных углов увеличивается вертикальная проекция стропа.
 В качестве примера выберем типоразмер четырехвет-вьевого стропа для подъема плит перекрытий массой 6 т при расстояниях между чалочными петлями вдоль плиты а = 5,6 м; Ъ = 2,6 м.(рис. 6.14).
В качестве примера выберем типоразмер четырехвет-вьевого стропа для подъема плит перекрытий массой 6 т при расстояниях между чалочными петлями вдоль плиты а = 5,6 м; Ъ = 2,6 м.(рис. 6.14).
Требуемой грузоподъемности Q = 6 т соответствует строп 4СК 1-6,3.
При предельном разводе диагонально расположенных ветвей с углом между ними 90° угол отклонения каждой ветви от вертикали составит 45°. Расстояние между диагонально расположенными чалочными петлями:

Требуемая длина стропа: L-

Принимаем строп 4СК1-6.3 4400 ГОСТ 25573-82 грузоподъемностью 6,3 т, длиной 4,4 м.


 Для захватывания однотипных грузов и подвешивания их к крюку применяют клещевые (рис. 6.15, а) и эксцентриковые (рис. 6.15, бив) зажимные фрикционные захваты. Для перемещения стальных листов и проката в цехах строительных металлических конструкций применяют подъемные электромагниты 1 (рис. 6.16), подвешиваемые к крюку крана и не требующие строповки грузов. Длинномерные грузы поднимают двумя электромагнитами, размещенными на траверсе. Электромагниты питаются постоянным током, подаваемым к ним по кабелю 2 от генератора, установленного на кране. Грузоподъемность электромагнита зависит от зазора между грузом и магнитными полюсами. Большая грузоподъемность обеспечивается при подъеме грузов с ровной плоской прилегающей к магниту поверхностью. Для подъема немагнитных листовых грузов (перегородочных плит, фанеры, листового стекла, бетонных изделий) применяют вакуумные грузозахватные устройства (рис. 6. 17) в виде вакуумных присосов диаметром до 400 мм с резиновым ободом, из полости которых вакуумными насосами удаляется воздух. Для подъема крупногабаритных грузов используют несколько навешиваемых на траверсу вакуумных захватов. В качестве грузозахватных приспособлений для работы с сыпучими (песок, гравий, щебень, мел и т. п.) и жидкими (строительные растворы и бетоны) грузами используют опрокидные и раскрывающиеся бадьи. Короб 1 (рис. 6.18, а) опрокидной бадьи подвешивают к траверсе 3, надеваемой на крюк крана. Центр масс порожнего короба располагается ниже и справа от поворотных цапф, благодаря чему он всегда занимает нужное для загрузки и транспортирования груза положение, которое фиксируется упором 2. Центр масс груженого короба находится выше и слева от поворотных
Для захватывания однотипных грузов и подвешивания их к крюку применяют клещевые (рис. 6.15, а) и эксцентриковые (рис. 6.15, бив) зажимные фрикционные захваты. Для перемещения стальных листов и проката в цехах строительных металлических конструкций применяют подъемные электромагниты 1 (рис. 6.16), подвешиваемые к крюку крана и не требующие строповки грузов. Длинномерные грузы поднимают двумя электромагнитами, размещенными на траверсе. Электромагниты питаются постоянным током, подаваемым к ним по кабелю 2 от генератора, установленного на кране. Грузоподъемность электромагнита зависит от зазора между грузом и магнитными полюсами. Большая грузоподъемность обеспечивается при подъеме грузов с ровной плоской прилегающей к магниту поверхностью. Для подъема немагнитных листовых грузов (перегородочных плит, фанеры, листового стекла, бетонных изделий) применяют вакуумные грузозахватные устройства (рис. 6. 17) в виде вакуумных присосов диаметром до 400 мм с резиновым ободом, из полости которых вакуумными насосами удаляется воздух. Для подъема крупногабаритных грузов используют несколько навешиваемых на траверсу вакуумных захватов. В качестве грузозахватных приспособлений для работы с сыпучими (песок, гравий, щебень, мел и т. п.) и жидкими (строительные растворы и бетоны) грузами используют опрокидные и раскрывающиеся бадьи. Короб 1 (рис. 6.18, а) опрокидной бадьи подвешивают к траверсе 3, надеваемой на крюк крана. Центр масс порожнего короба располагается ниже и справа от поворотных цапф, благодаря чему он всегда занимает нужное для загрузки и транспортирования груза положение, которое фиксируется упором 2. Центр масс груженого короба находится выше и слева от поворотных
 цапф. От опрокидывания груженый короб удерживается рычагом 4, который выдергивают для разгрузки бадьи. После разгрузки короб возвращается в исходное положение. У бадьи с раскрывающимся днищем (рис. 6.18, б) створки 9 удерживаются в закрытом
цапф. От опрокидывания груженый короб удерживается рычагом 4, который выдергивают для разгрузки бадьи. После разгрузки короб возвращается в исходное положение. У бадьи с раскрывающимся днищем (рис. 6.18, б) створки 9 удерживаются в закрытом
или открытом положениях рычагами 7 и 8, которые переводятся рычагом 5 соответственно влево или вправо за «мертвую точку» оси 6.
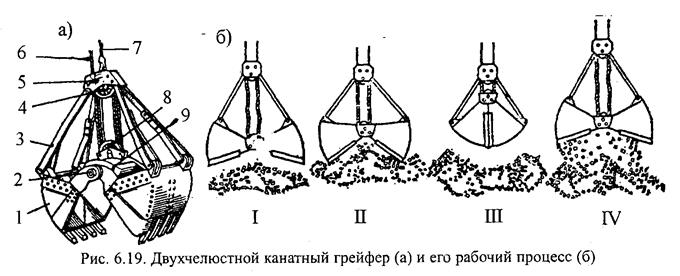
Для массовой перегрузки сыпучих материалов применяют челюстные ковши-грейферы. Наиболее распространены в строительстве двухчелюстные двухканатные грейферы (рис. 6.19, а). Грейфер подвешивают к двум приводным барабанам на подъемном (поддерживающем) 7 и замыкающем 6 канатах. Подъемный канат закреплен на верхней траверсе 5, к которой посредством тяг 3 присоединены две челюсти / ковшовой формы, соединенные между собой шарниром 2 на нижней траверсе 9. На верхней траверсе установлена неподвижная 4, а на нижней - подвижная 8 обойма блоков полиспаста, сбегающая ветвь которого является замыкающим канатом. Для начала работы грейфер опускают на захватываемый материал, удерживая его поддерживающим канатом (положение /, рис. 6.19, б). Для лучшего зачерпывания кусковых и слежавшихся материалов грейфер опускают броском. Медленно поднимая грейфер замыкающим канатом со скоростью примерно 1 м/с при ослабленном поддерживающем канате, захватывают материал закрывающимися челюстями (положение II). После полного смыкания челюстей, удерживая грейфер на замыкающем канате, переносят его к месту разгрузки (положение III). Разгружают грейфер, удерживая его на весу поддерживающим канатом, вследствие чего челюсти раскрываются, и материал высыпается (положение IV). Таким образом, управление работой грейфера в течение его рабочего цикла сводится к попеременному переключению приводных барабанов для удержания грейфера либо на поддерживающем, либо на замыкающем канатах.
Глубина погружения раскрытых челюстей грейфера в материал зависит от плотности материала, массы грейфера, а также от кинетической энергии при его падении в начале этого процесса (при зачерпывании кусковых и слежавшихся материалов). Каждому материалу определенной плотности соответствует своя оптимальная масса грей-
фера, которую изменяют специальными грузами, навешиваемыми на нижнюю траверсу. При массе грейфера ниже оптимальной его челюсти недостаточно заглубляются в материал, в результате чего не обеспечивается требуемое заполнение грейферного ковша. При массе выше оптимальной ковш зарывается в материал, при этом увеличиваются сопротивления материала внедрению челюстей, вследствие чего также ухудшается заполнение ковша.
В механизмах подъема груза и изменения вылета грузоподъемных машин с машинным приводом устанавливают нормально закрытые тормоза, автоматически размыкающиеся при включении привода. В механизмах подъема с ручным приводом устанавливают также автоматически действующие грузоупорные тормоза. В машинах с гидроприводом эту функцию выполняют обратные клапаны, исключающие возможность опускания груза или стрелы при падении давления в гидросистеме. В механизмах передвижения тормоза устанавливают на машинах, работающих на открытом воздухе или в помещениях при передвижении по напольному рельсовому пути, а также надземному пути при скорости более 32 м/мин.
6.4. Лебедки

Лебедками называют устройства для подъема (подъемные лебедки) или горизонтального перемещения (тяговые лебедки) грузов. По виду привода они могут быть ручными и приводными (от электродвигателя, гидромотора или ДВС). Барабанные лебедки оборудуют одним или двумя барабанами. В конструкциях шахтных подъемников (лифтов), а также в качестве подъемных устройств подвесных подмостей, используемых при ремонте фасадов зданий, нашли применение безбарабанные лебедки с канатоведущим шкивом. Лебедки характеризуются тяговым усилием и скоростью движения каната (окружным усилием или скоростью на первом слое навивки каната на барабан или в набегающей на канатоведущий шкив ветви каната). Барабанные лебедки, кроме того, характеризуются канатоем-костью барабана - максимальной длиной каната, укладываемого на барабан (см выше).
Наиболее просты по устройству ручные лебедки (рис. 6.20), используемые, в основном, как вспомогательное монтажное оборудование. Лебедка состоит из барабана 1, открытых зубчатых передач 3 и 7, дискового грузоупорного тормоза 5, установленных на параллельных валах, опирающихся на подшипники в боковинах станины 2. Поднимают и опускают груз вращением рукояток 4 одним, двумя или четырьмя рабочими. При кратковременной работе усилие одного рабочего на рукоятке не превышает 200 Н. Для увеличения скорости подъема легких грузов служит зубчатый перебор 6, дискретно изменяющий передаточное число зубчатой передачи.
Наибольшее распространение как в приводах грузоподъемных машин с электроприводом, так и как самостоятельные подъемные механизмы получили электрореверсивные лебедки (рис. 6.21). Барабан такой лебедки приводится электродвигателем 4 (рис. 6.21, б) через зубчатый редуктор 1. Лебедка оборудована нормально замкнутым двухколодочным тормозом 2, установленным на шкиве упругой втулочно-пальцевой муфты 3. Электродвигатель, тормоз, редуктор и опоры барабана 5 закреплены на свар-
 ной раме, устанавливаемой на фундамент (для лебедок как самостоятельных подъемных механизмов) или на несущем каркасе грузоподъемной машины. Опускают груз или только грузозахватные приспособления реверсированием электродвигателя.
ной раме, устанавливаемой на фундамент (для лебедок как самостоятельных подъемных механизмов) или на несущем каркасе грузоподъемной машины. Опускают груз или только грузозахватные приспособления реверсированием электродвигателя.
Основными параметрами лебедок являются номинальная мощность приводного двигателя Рдв (кВт), крутящий момент на барабане Т6 (кН-м) и частота вращения барабана иб (об/мин). При известной грузоподъемности Q (т) полиспаста, в комплекте с которым работает лебедка и требуемой скорости vr (м/с) перемещения груза номинальная мощность двигателя определится как
 (6-6)
(6-6)

В случае электрического привода электродвигатель выбирают по номинальной мощности и режиму работы. Частоты вращения электродвигателя п№ и барабана лб (см. выше) связаны между собой передаточным отношением трансмиссии:

В качестве трансмиссии обычно используют стандартные зубчатые, реже червячные, редукторы. Если передаточное отношение ир выбранного редуктора отклоняется больше чем на 5% от расчетного передаточного отношения трансмисии, его дополняют либо открытой зубчатой передачей, либо корректируют прежде назначенный диаметр барабана. При использовании первой меры следует избегать применения в одной трансмиссии участков, понижающих (редуктор) и повышающих (открытая передача) частоту вращения. В соответствии с этим требованием передаточное число редуктора не должно быть больше общего передаточного числа трансмиссии. При использовании второй меры в случае принятого ранее диаметра барабана по минимальному значению с его корректировкой можно только увеличить этот размер, в связи с чем следует также откорректировать (уменьшить) требуемую частоту вращения барабана, что приведет к повышению передаточного отношения трансмиссии. Следовательно, эта мера может быть использована, если передаточное число редуктора окажется больше предварительно рассчитанного (до корректировки диаметра барабана) передаточного числа трансмиссии.
Барабан и электродвигатель располагают как с одной стороны редуктора, так и по разные его стороны. Более компактно одностороннее расположение.
Тормоз выбирают по тормозному моменту (Н-м):

где Кт - коэффициент запаса торможения, в зависимости от режима работы принимаемый равным от 1,5 до 2,5; Гтст - наибольший статический тормозной момент, Н-м.
Существуют также более компактные, но и более дорогие электрореверсивные лебедки со встроенными в барабан планетарными редукторами и электродвигателем.
Тяговые усилия наиболее часто применяемых однобарабанных электрореверсивных лебедок составляют от 3,2 до 125 кН при скорости каната 0,5 ... 0,1 м/с и канатоем-кости от 80 до 800 м.
Определим параметры электрореверсивной лебедки, в составе которой применен рассчитанный ранее (см. стр. 147 - 148) барабан диаметром 360 мм с трехслойной навивкой каната диаметром dK = 21 мм и требуемой частотой вращения «5 = 27 об/мин и канатно-блочная система с полиспастом грузоподъемностью Q = 25 т при средней скорости подъема груза vr = 0,15 м/с. Максимальное усилие в канате S = 64,54 кН; диаметр барабана по ребордам Dp = 570 мм; режим работы легкий (775 = 25%).
Предварительно примем суммарный КПД механизма, включая канатно-блочную систему, г|?= 0,8. Требуемую мощность электродвигателя найдем по формуле (6.6):

Принимаем электродвигатель с фазовым ротором МТН 512-8. При ПВ = 25% номинальная мощность Рдв ном = 45 кВт, частота вращения ротора идв = 695 об/мин, радиус корпуса а = 212 мм. Перегрузка:
 . Требуемое передаточное отношение трансмиссии:
. Требуемое передаточное отношение трансмиссии:

При расположении барабана и электродвигателя с одной стороны редуктора межосевое расстояние А последнего должно быть не менее:

Передаваемой мощности и синхронной частоте вращения 750 об/мин соответствует цилиндрический двухступенчатый редуктор Ц2-400, а по более компактному расположению элементов лебедки - Ц2-500. Окончательное решение принимается после анализа компоновки с учетом конструктивных, эксплуатационных и иных требований, предъявляемых к машине, на которой устанавливается лебедка. Для определенности принимаем редуктор Ц2-500. При передаточном числе «р = 24,9 он способен передавать движение мощностью 103 кВт, а при и„ = 32,42 - 83 кВт. Отклонение от расчетного значения и составит соответственно:

что ниже допустимой расчетной погрешности 5%.

что выше допустимой расчетной погрешности. Окончательно принимаем редуктор Ц2-500 с передаточным числом и_ = 24,9.
При необходимости могут быть уточнены скорости подъема груза при работе на каждом слое навивки каната на барабан. Также может быть уточнено значение общего КПД лебедки и откорректированы все рассчитанные выше силовые параметры. Однако это уточнение не внесет каких-либо существенных поправок в результаты расчетов.
Тормоз устанавливаем на ведущем валу редуктора. Наибольший статический тормозной момент:

где rip = 0,96 - КПД двухступенчатого зубчатого редуктора. Требуемый тормозной момент при Кт= 1,5:

Принимаем колодочный тормоз ТКТГ-400М с электрогидравлическим толкателем ТГМ-80. Диаметр шкива DT = 400 мм; тормозной момент Гт факт = 1500 Н-м.
Для соединения валов электродвигателя и редуктора принимаем упругую втулочно-паль-цевую муфту МУВП-7 с диаметром тормозного шкива Ош = 400 мм и расточками под цилиндрический конец вала электродвигателя диаметром 70 мм и конический конец вала редуктора диаметром 60 мм с конусом 1:10. Муфта способна передать крутящий момент Гм факт = 5500 Н-м.
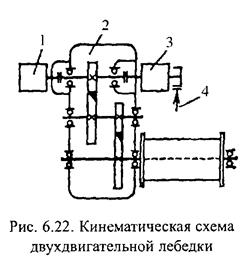 Кроме описанных в подъемных механизмах кранов с электроприводом, работающих на монтаже строительных конструкций, широко применяют многоскоростные лебедки. Для привода такой лебедки используют два электродвигателя, установленные по разные или по одну сторону редуктора 2 (рис. 6.22). Для подъема и опускания номинального груза с номинальной скоростью используют основной двигатель 3 при невключенном, но с вращающимся валом, вспомогательном двигателе 1. Малые грузы и крюк без груза поднимают и опускают вспомогательным двухскоростным двигателем 1, номинальная частота вращения вала которого значительно выше, чем основного двигателя. "Посадочная" скорость, используемая при установке строительных конструкций в проектное положение, обеспечивается совместной работой основного двигателя в специальном режиме динамического торможения и вспомогательного двигателя на малой скорости. Как и у односкоростных лебедок, тормоз 4 устанавливают на быстроходном валу, обычно - на валу основного двигателя.
Кроме описанных в подъемных механизмах кранов с электроприводом, работающих на монтаже строительных конструкций, широко применяют многоскоростные лебедки. Для привода такой лебедки используют два электродвигателя, установленные по разные или по одну сторону редуктора 2 (рис. 6.22). Для подъема и опускания номинального груза с номинальной скоростью используют основной двигатель 3 при невключенном, но с вращающимся валом, вспомогательном двигателе 1. Малые грузы и крюк без груза поднимают и опускают вспомогательным двухскоростным двигателем 1, номинальная частота вращения вала которого значительно выше, чем основного двигателя. "Посадочная" скорость, используемая при установке строительных конструкций в проектное положение, обеспечивается совместной работой основного двигателя в специальном режиме динамического торможения и вспомогательного двигателя на малой скорости. Как и у односкоростных лебедок, тормоз 4 устанавливают на быстроходном валу, обычно - на валу основного двигателя.
В конструкциях машин с групповым приводом применяют также лебедки с двумя барабанами, посаженными на один вал. В этом случае каждый барабан подключают к единой трансмиссии через фрикционные муфты, благодаря чему оба барабана можно включать в работу как одновременно, так и поочередно. Устройство и кинематика таких лебедок применительно к приводам одноковшовых канатных экскаваторов будут рассмотрены ниже в главе 7.
 В лебедках с канатоведушими шкивами (рис. 6.23), применяемых в качестве подъемных механизмов шахтных подъемников - лифтов, несколько параллельных канатов охватывают шкив с кольцевыми желобками. При отсутствии отклоняющих блоков угол обхвата составляет 180°. К концам каната с одной стороны подвешена кабина, а с другой - противовес, масса которого равна массе кабины, сложенной с половиной массы расчетного груза. При этом условии противовес обычно удерживает груженую и негруженую кабину без проскальзывания канатов относительно шкива.
В лебедках с канатоведушими шкивами (рис. 6.23), применяемых в качестве подъемных механизмов шахтных подъемников - лифтов, несколько параллельных канатов охватывают шкив с кольцевыми желобками. При отсутствии отклоняющих блоков угол обхвата составляет 180°. К концам каната с одной стороны подвешена кабина, а с другой - противовес, масса которого равна массе кабины, сложенной с половиной массы расчетного груза. При этом условии противовес обычно удерживает груженую и негруженую кабину без проскальзывания канатов относительно шкива.
Для подъема грузов небольшой массы (до 5 т) на высоту до 3 м, например, при выполнении ремонтных работ, используют ручные тали (рис. 6.24), которые подвешивают к потолочньш балкам, треногам и другим устройствам с помощью крюка 5. Тяговым органом является грузовая пластинчатая или овальшкивом но-звеньевая цепь 1, охватывающая звездочку 5, жестко связанную с червячным колесом 4 червячного редуктора. Для подъема и опускания груза червяк 7 приводят во вращение вручную цепью 8, охватывающей цепное колесо 6. Для увеличения КПД применяют двухзаходную несамотормозящую червячную передачу, а для удержания груза на весу используют дисковый или конический грузоупорный тормоз 2. Во избежание спадания грузовой цепи со звездочек ее пропускают между блоком 10 крюковой обоймы и пальцами, соединяющими боковые пластины 9.
Прилагаемое к приводной цепи усилие Q (Н) связано с массой поднимаемого груза (вместе с крюковой обоймой и тяговой цепью) т (кг) соотношением

где г и R - радиусы начальных окружностей звездочки и цепного колеса (м); и - передаточное число червячной передачи; т) - КПД тали, учитывающий потери энергии на трение в червячной передаче, в паре приводная цепь -цепное колесо, а также в зацеплениях тяговой цепи со звездочкой и с блоком крюковой обоймы.
Для перегрузки грузов в складских и производственных помещениях, на монтажных площадках, а также для комплектования комбинированных однобалочных козловых и полукозловых кранов (см. п. 6.11) применяют тали с электрическим приводом (тельферы) (рис. 6.25), перемещаемые по монорельсовым путям прямолинейного или за-
мкнутого контура собственным механизмом передвижения 1 (рис. 6.25, а). Подъемный механизм 2 электротали приводится прифланцованным к корпусу 6 (рис. 6.25, б) или встроенным в барабан 7 асинхронным короткозамкнутым крановым электродвигателем 8 через редуктор 5. Таль оснащена действующим автоматически нормально замкнутым дисковым электромагнитным тормозом 4. Управляют электроталью с пола с помощью кнопочного пульта 3 (рис. 6.25, а), подвешенного на гибком кабеле.

Грузоподъемность электроталей составляет обычно от 0,25 до 5 т, высота подъема - до 6 м, скорость подъема груза - 8 м/мин, скорость передвижения - 20 м/мин. Известны также электротали грузоподъемностью Ют при высоте подъема до 20 м.
6.5. Строительные подъемники
Строительные подъемники предназначены для подъема грузов и людей на этажи зданий при отделочных и ремонтных работах. Грузы размещаются в ковшах, кабинах и на площадках, перемещаемых в жестких направляющих в вертикальном или близком к вертикальному направлении. По назначению они бывают грузовыми и грузопассажирскими, а по конструкции направляющих - мачтовыми, у которых направляющие выполнены в виде свободно стоящих или прикрепленных к зданию мачт, и шахтными, в которых направляющие находятся внутри шахты, являющейся ограждением для кабины (грузовой площадки). На завершающей стадии строительства для передачи строительных материалов на верхние этажи используют также установленные внутри здания стационарные шахтные грузовые, пассажирские или грузопассажирские подъемники (лифты).
Все строительные подъемники изготовляются и эксплуатируются в соответствии с Правилами Госгортехнадзора РФ. До пуска в работу подъемники подлежат регистрации в органах Госгортехнадзора и подвергаются техническому освидетельствованию.
Грузовые мачтовые подъемники (рис. 6.26, а) устанавливают снаружи возводимых зданий. Подъемник состоит из опорной рамы 1, мачты 4 из отдельных наращивае-
 мых по мере возведения здания секции, каретки 6, грузовой платформы 7, электрореверсивной лебедки 3. с полиспастной системой и электрического шкафа 2. Каретка с грузовой платформой перемещается по направляющим мачты: вверх -лебедкой, с которой она связана канатом с помощью блока 8 (рис. 6.26, б); вниз - гравитационно. Подъемник устанавливают так, чтобы грузовая платформа двигалась против оконных проемов здания. Грузовые платформы современных подъемников с высотой подъема груза 17 м и более оборудуют выдвижной площадкой 10 (рис. 6.26, в) с приводом 9 для ее ввода в оконный проем. Подъемники оборудуют конечными выключателями для отключения двигателя лебедки по достижении платформой требуемой высоты, а также автоматическими аварийными ловителями для остановки платформы в случае обрыва грузового каната. Управлять подъемником можно как с уровня нижней рамы, так и с любого этажа. При этом схема управления выполнена так, что одновременно управлять можно только с одного уровня, аппараты управления, расположенные на других уровнях, в это время отключаются. При высоте мачты более 10 м ее крепят к стене здания настенными опорами 5 (см. рис. 6.26, а). Раму малых подъемников оборудуют пневмоколесами для перемещения прицепом к самоходному транспортному средству при перебазировании с одного объекта на другой. Средние и большие подъемники при перевозке демонтируют на отдельные части.
мых по мере возведения здания секции, каретки 6, грузовой платформы 7, электрореверсивной лебедки 3. с полиспастной системой и электрического шкафа 2. Каретка с грузовой платформой перемещается по направляющим мачты: вверх -лебедкой, с которой она связана канатом с помощью блока 8 (рис. 6.26, б); вниз - гравитационно. Подъемник устанавливают так, чтобы грузовая платформа двигалась против оконных проемов здания. Грузовые платформы современных подъемников с высотой подъема груза 17 м и более оборудуют выдвижной площадкой 10 (рис. 6.26, в) с приводом 9 для ее ввода в оконный проем. Подъемники оборудуют конечными выключателями для отключения двигателя лебедки по достижении платформой требуемой высоты, а также автоматическими аварийными ловителями для остановки платформы в случае обрыва грузового каната. Управлять подъемником можно как с уровня нижней рамы, так и с любого этажа. При этом схема управления выполнена так, что одновременно управлять можно только с одного уровня, аппараты управления, расположенные на других уровнях, в это время отключаются. При высоте мачты более 10 м ее крепят к стене здания настенными опорами 5 (см. рис. 6.26, а). Раму малых подъемников оборудуют пневмоколесами для перемещения прицепом к самоходному транспортному средству при перебазировании с одного объекта на другой. Средние и большие подъемники при перевозке демонтируют на отдельные части.
Грузовые мачтовые подъемники общего назначения могут поднимать и подавать в оконные проемы грузы массой 0,3 ... 0,5 т при высоте здания до 16 этажей. Скорость подъема составляет 22 ... 37 м/мин. В высотном строительстве применяют подъемники грузоподъемностью до 1,6 т при высоте подъема до 200 м и более.
Разновидностью мачтовых подъемников являются бесканатные подъемники, выполненные в виде одно- или двухстоечной мачты, к направляющим которой прикреплены зубчатые рейки, находящиеся в постоянном зацеплении с приводными зубчатыми колесами располагаемого на грузовой платформе подъемного механизма. В подъемниках этого типа иногда применяют противовесы, уравнивающие вес подъемного механизма и половину веса кабины, что дает экономию энергии, но усложняет монтаж подъемника.
Бесканатные подъемники используют как для подъема грузов и подачи их в оконные проемы зданий, так и в качестве пассажирских подъемников в башенных кранах для подъема в кабину и спуска обслуживающего персонала.
Для подачи сыпучих материалов в бункера, а также для работы на складах и предприятиях промышленности строительных материалов применяют ковшовые (скиповые) подъемники, являющиеся разновидностью мачтовых подъемников. В ковшовых подъемниках (рис. 6.27) ковш 1, оборудованный ходовыми колесами (роликами), пере-
 и канатоведущим шкивом 6 (рис. 6.28,6). подъемного каната 7 и стрелы 3 (рис. 6.28.
и канатоведущим шкивом 6 (рис. 6.28,6). подъемного каната 7 и стрелы 3 (рис. 6.28.
мещается лебедкой по наклонно-вертикальным рельсам 2, раздельным для передних 3 и задних 4 колес. В месте разгрузки передние колеса доходят до упора, относительно которого ковш опрокидывается. Загружают ковш в приямке из транспортных средств. Вместимость ковша составляет обычно 1 м3, скорость его перемещения, в зависимости от высоты подъема, - 0,1 ... 0,5 м/с.
 При строительстве высотных зданий для подъема грузов и людей применяют строительные грузопассажирские подъемники (рис. 6.28) грузоподъемностью 0,5 ... 1 т при высоте подъема до ПО м (30 этажей здания). Подъемник состоит из мачты 1 (рис. 6.28, а) с направляющими, закрепленной на подвижной каретке кабины 5, опорной рамы с установленной на ней лебедкой противовеса 2, блоков 4 на голове мачты, а) для наращивания мачты. Кабину подъемника оборудуют выдвижной площадкой и ограничителями для обеспечения безопасности при высадке людей и разгрузке материалов. Двери кабины и шахты имеют контакты, включенные в электрическую цепь управления двигателем так, чтобы исключить включение электродвигателя при открытых дверях. Кабину оборудуют ловителями - особыми захватами, которыми она в случае обрыва подъемного каната жестко соединяется с направляющими. Пульт управления кабиной и выдвижной площадкой располагают внутри кабины.
При строительстве высотных зданий для подъема грузов и людей применяют строительные грузопассажирские подъемники (рис. 6.28) грузоподъемностью 0,5 ... 1 т при высоте подъема до ПО м (30 этажей здания). Подъемник состоит из мачты 1 (рис. 6.28, а) с направляющими, закрепленной на подвижной каретке кабины 5, опорной рамы с установленной на ней лебедкой противовеса 2, блоков 4 на голове мачты, а) для наращивания мачты. Кабину подъемника оборудуют выдвижной площадкой и ограничителями для обеспечения безопасности при высадке людей и разгрузке материалов. Двери кабины и шахты имеют контакты, включенные в электрическую цепь управления двигателем так, чтобы исключить включение электродвигателя при открытых дверях. Кабину оборудуют ловителями - особыми захватами, которыми она в случае обрыва подъемного каната жестко соединяется с направляющими. Пульт управления кабиной и выдвижной площадкой располагают внутри кабины.
Лебедки грузопассажирских подъемников подвергаются полному техническому освидетельствованию перед их пуском в работу, а также периодически каждые 12 мес. Статические испытания при техническом освидетельствовании проводят нагрузкой, на 50% превышающей тяговое усилие при подъеме, а динамические испытания - нагрузкой, превышающей тяговое усилие на 10%.
6.6. Вышки
 Вышки (рис. 6.29, а) предназначены для вертикального подъема людей и грузов при обслуживании осветительной сети, контактных линий общественного транспорта, при монтажных и ремонтных работах и т. п.
Вышки (рис. 6.29, а) предназначены для вертикального подъема людей и грузов при обслуживании осветительной сети, контактных линий общественного транспорта, при монтажных и ремонтных работах и т. п.
Вышка состоит из смонтированной в задней части кузова грузового автомобиля 1 телескопической мачты 3 с люлькой 2 в ее верхней части и механизмов подъема мачты и ее раздвижки. Для работы с грузами массой до 1 т вышку оборудуют кран-укосиной с лебедкой. Механизмы приводятся в движение от базового автомобиля.
Мачта состоит из нескольких трубчатых секций, вставленных одна в другую и раздвигаемых канатно-блоч-ной системой с помощью лебедки (рис 6.29, б); гидравлически, для чего ее вы- "' полняют в виде телескопического гидроцилиндра, или комбинированно (рис. 6.29, в) - нижняя секция гидроцилиндром, остальные - канатно-блочной системой. Вдвигаются секции гравитационно. Вход в люльку через люк в полу или через боковой проем.
Перед переводом мачты в рабочее положение автомобиль устанавливают на выдвижные опоры 4 (см. рис. 6.29, а) в его задней части. Для предупреждения падения секций мачты при \ от насоса обрыве канатов ее оборудуют замедлителями или ловителями. В качестве замедлителей используют компрессионные кольца на нижних торцах секций, которые разделяют все внутримачтовое пространство на отдельные замкнутые полости. В случае указанной аварийной ситуации сжимаемый в этих полостях воздух замедляет опускание вышерасположенных секций до безопасной скорости. Механические ловители при обрыве каната заклинивают падающую секцию.
В последнее время все большее распространение получают вышки с гидроприводом и телескопическими мачтами и стрелами - сменным рабочим оборудованием стреловых самоходных кранов. Основными параметрами вышек являются: грузоподъемность, рабочая высота и продолжительность подъема люльки.
6.7. Общие сведения о строительных кранах
Краны применяют для перемещения грузов по пространственным траекториям произвольной конфигурации в различных отраслях народного хозяйства. Из них строительными называют краны, для которых строительство является основной областью применения. Их изготовляют в виде консольных и пролетных конструкций. Базовые параметры строительных кранов определяются параметрами строительных объектов и их элементов.
Консольные краны, обычно стреловые, состоят из неповоротной и поворотной частей; к последней прикреплена стрела с полиспастом на ее конце, к подвижной обойме которого подвешено грузозахватное устройство. Неподвижная обойма полиспаста может быть также установлена на подвижной каретке (тележке), перемещающейся вдоль стрелы. Груз в этих кранах всегда находится вне опорного контура крана. К консольным относятся мачтово-стреловые и башенные краны, большая группа самоходных стреловых кранов (гусеничных, рельсоколесных, пневмоколесных, на шасси автомобильного типа, автомобильных, тракторных, кранов-трубоукладчиков, мощных монтажных кранов).
|
из
5.00
|
Обсуждение в статье: Ковшовые конвейеры и подъемники непрерывного действия 3 страница |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы