 |
Главная |


Метод решения задачи на быстродействие с учетом демпфирования
|
из
5.00
|
 Рассмотрим систему, динамика которой описывается следующей системой дифференциальных уравнений
Рассмотрим систему, динамика которой описывается следующей системой дифференциальных уравнений

 (6.4)
(6.4)
Такими уравнениями, например, описывается движение маятника в поле массовых сил при действии управляющей силы u(t).
Требуется перевести систему (6.4) из состояния

в начало координат ( y1к=0, y2к=0) за минимальное время.
В данном случае

 где
где


 Соответственно,
Соответственно,
Решая последнюю систему уравнений, найдем


Будем считать, что на управление наложены ограничения (│u(t) │≤1).
Из условия максимума функции H следует, что
 .
.
Учитывая, что  - функция, имеющая не более одного нуля, т.е. меняющая знак не более одного раза, оптимальное управление может быть:
- функция, имеющая не более одного нуля, т.е. меняющая знак не более одного раза, оптимальное управление может быть:  или с одним переключением.
или с одним переключением.
 Предположим, что
Предположим, что  , тогда система (6.4) запишется в следующем виде:
, тогда система (6.4) запишется в следующем виде:

Отсюда следует, что (у1+1)dy1=y2dy2 . Интегрируя, получим уравнение фазовой траектории: (у1+1)2-у22=R1.
Этим уравнением описывается семейство гипербол с центром в т.(-1;0) , представленное на рис.6. Т.к.  , то движение будет слева направо в верхней полуплоскости (у2>0) и справа налево в нижней. Как и ранее, нас интересуют дуги тех гипербол, которые приводят в начало координат. Это дуга АО.
, то движение будет слева направо в верхней полуплоскости (у2>0) и справа налево в нижней. Как и ранее, нас интересуют дуги тех гипербол, которые приводят в начало координат. Это дуга АО.
И только при R1=1 фазовая траектория проходит через начало координат. Поэтому с управлением  можно попасть в начало координат только, стартуя с фазовой траектории АО.
можно попасть в начало координат только, стартуя с фазовой траектории АО.
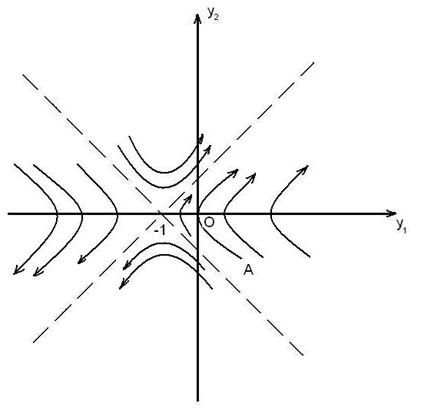
Рис.6
Аналогично, при управлении  ,получим: (у1-1)2-у22=R2. Этим уравнением описывается семейство гипербол с центром в т.(1;0) , представленное на рис.7. Соответственно, с управлением можно попасть в начало координат только, стартуя с фазовой траектории BО, которая соответствует значению R2=1.
,получим: (у1-1)2-у22=R2. Этим уравнением описывается семейство гипербол с центром в т.(1;0) , представленное на рис.7. Соответственно, с управлением можно попасть в начало координат только, стартуя с фазовой траектории BО, которая соответствует значению R2=1.

Рис.7
В результате получим следующее: данная задача имеет решение не во всех случаях, в отличии от предыдущей задачи быстродействия. Требуется, чтобы начальное состояние системы (6.4) входило в область управляемости, представленную на рис. 8 в виде областей C и D. Из других областей привести систему в начало координат невозможно.
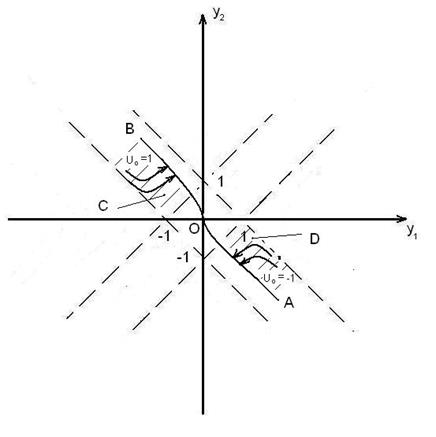
Рис.8
Соответственно, управление формируется следующим образом:
u0(у1, у2)=1, если (у1, у2)  С или находится на дуге АО;
С или находится на дуге АО;
u0(у1, у2)=-1, если (у1, у2) D или находится на дуге ВО.
Если начальное состояние системы (6.4) соответствует дуге АО или ВО, то управление остается постоянным, и наша система придет в начало координат. В случае, когда начальное состояние системы (6.4) входит в область управляемости, но не находится на дугах АО или ВО важно правильно выбрать момент переключения управления. Критерием выбора будет сравнение значения у1(t) c константами R1 или R2.
Предположим, что начальному состоянию системы соответствует точка М на фазовой плоскости с координатами (у10,у20) и для определенности она принадлежит области С. Тогда u0(у10, у20)=1 и (у10+1)2-у202=R1 . Двигаясь по этой траектории, т. М обязательно окажется на дуге ВО. Значит, будет существовать решение следующей системы уравнений:
 (у1(t)+1)2-у2(t)2=R1
(у1(t)+1)2-у2(t)2=R1
(у1(t)-1)2-у2(t)2=1
Решая ее получим, что смена управления произойдет когда у1(t) приметзначение  и дальше т. М будет двигаться по дуге ВО.
и дальше т. М будет двигаться по дуге ВО.
Аналогично, если изначально точка М находилась в области D, то момент переключения управления с u0(у1, у2)=-1 на u0(у1, у2)=1, т.е. движение по дуге АО, произойдет при у1(t)=  .
.
6. Алгоритм решения задачи на быстродействие с учетом демпфирования .
1. Задаем исходные данные: шаг интегрирования, шаг вывода результатов, начальную точку на фазовой плоскости  Точка у0 должна принадлежать области управляемости. В зависимости от
Точка у0 должна принадлежать области управляемости. В зависимости от  выбирается управление u0 и вычисляется константа R1 или R2.
выбирается управление u0 и вычисляется константа R1 или R2.
2. Интегрируем численным методом Рунге-Кутта дифференциальные уравнения (6.4).При этом, контролируя текущее значения у1(t) , меняем не более одного раза управление u0..
3. При попадании с точностью  в начало координат, прекращаем интегрирование.
в начало координат, прекращаем интегрирование.
В результате получаем искомое время  , за которое система переводится из произвольного начального состояния в заданное конечное.
, за которое система переводится из произвольного начального состояния в заданное конечное.
Примечание. Если конечным состоянием является не начало координат, т.е. у11 =у1к≠0, у21=у2к≠0, то выбираем новую систему координат, в которой  . Соответственно требуется пересчитать
. Соответственно требуется пересчитать  и
и 
7. Текст программы.
Смотри приложение №6.
Задание.
1. Студентам требуется, используя данный в приложение №6 текст программы, самостоятельно подобрать исходные данные для решения задачи быстродействия: шаг интегрирования, шаг вывода результатов, y0, u0. При задании неправильных значений
y0, u0, ,находящихся вне области сходимости, задача не будет решена.
2. Получив решения обеих задач быстродействия, проанализировать полученные результаты. Сделать выводы по результатам работы.
ПРИЛОЖЕНИЕ
Приложение №1.
Текст программы на Turbo Pascal, в которой реализован метод покоординатного спуска
Uses Graph,Crt;
Type Vector=array[1..10] of real;
Var i,j,n,x0,y0,z:integer;
it:longint;
fx,f0,fxn,norm,h,h0,hmin,eps,m:real;
x,xn,Grad:Vector;
{================================================================}
{* Функция F(x) *}
Function f(x:Vector):real; { Eps=1e-3 }
Begin
{ Test !!! }
F:=sqr(x[1]+5.6)+sqr(x[2]-2.4) { 2 итерации }
{ 1 f:= sqr(x[1])+sqr(x[2])+sqr(x[3])+x[1]-x[1]*x[2]-2*x[3] }
{ 2 f:=100*sqr(x[2]-x[1]*x[1])+sqr(1-x[1]) }
{ 3 f:=sqr(x[2]-x[1]*x[1])+sqr(1-x[1]*x[2]) }
{ 4 f:= 5*sqr(x[1])+sqr(x[2])+4*x[1]*x[2]-16*x[1]-12*x[2] }
{ 5 f:= sqr(x[1])+2*sqr(x[2])+3*sqr(x[3])+10*x[1]-6*x[1]*x[3]-20*x[3] }
End;
{* Процедура инициализации графики *}
Procedure Gr(x,y:real);
Var gd,gm:integer;
Begin
gd:=detect;
initgraph(gd,gm,' ');
SetBkColor(15);
x0:=320;y0:=240;
SetColor(14);
Line(0,y0,640,y0);Line(x0,0,x0,480);
SetColor(2);
MoveTo(round(x0+x*m),round(y0-y*m))
End;
{* Процедура вывода графиков *}
Procedure Gr_out(x,y:real);
Begin
LineTo(round(x0+x*m),round(y0-y*m));
End;
procedure poisk;
begin
xn[i]:=x[i]+z*h; fxn:=f(xn);
end;
{================================================================}
Begin
h0:=1; { Шаг }
eps:=1e-3; { Точность }
hmin:=1e-4;
it:=0; { Количество итераций }
m:=10; { Масштаб }
Write('n='); Read(n); { Размерность }
for i:=1 to n do
x[i]:=10; { Начальная точкa }
Assign(Output,'grad.txt');
Rewrite(Output);
Gr(x[1],x[2]);
xn:=x; fx:=f(x); z:=1;
REPEAT
it:=it+1;
f0:=fx;
for i:=1 to n do begin
h:=h0;
Repeat
z:=1;
(* 1 *) repeat
poisk;
while fxn<fx do begin
x[i]:=xn[i]; fx:=fxn; poisk;
end;
z:=-z;
until z>0 (* 1 *);
h:=h/10;
Until h<hmin;
xn[i]:=x[i];
If (it>=10000)and(it<35500)or(it<=1000) Then
begin
Write('it=',it:4);
for j:=1 to n do
Write(' x[',j,']=',x[j]:10:6);
Writeln; end;
Gr_out(x[1],x[2]); {* Рисование графика *}
end; { for }
Until Abs(fx-f0)<Eps;
Writeln;
Write('it=',it:4);
for i:=1 to n do
Write(' x[',i,']=',x[i]:10:6);
Writeln;
ReadKey;
End.
Текст программы на Turbo Pascal, в которой реализован метод деформированного многогранника
Program SimplexMethod;
Uses Crt;
Type
TFloat = Real;
Const
N_S = 10;
Max_Float = 1.0e+32;
Type
Vector = Array[1..Succ(N_S)] Of TFloat;
Matrix = Array[1..Succ(N_S), 1..N_S] Of TFloat;
OptimFunc = Function(N: Byte; X: Vector): TFloat;
Var
X: Vector;
H, Fmin: TFloat;
N, I, IT : Integer;
Function OFunc(N: Byte; X: Vector): TFloat; Far;
Begin
OFunc:=100*sqr(X[2]-sqr(X[1]))+sqr(1-X[1]);
End;
Procedure Simplex(N: Byte; OFunc: OptimFunc; Eps, H: TFloat;
var X: Vector; var Fmin: TFloat; var IT: Integer);
Var
I, J, K, Ih, Ig, IL, ITR : Integer;
Smplx: Matrix;
Xh, Xo, Xg, Xl, Xr,Xc, Xe, F : Vector;
Fh, Fl, Fg, Fo, Fr, Fe: TFloat;
S, D, Fc: TFloat;
Const
Alpha = 1.0;
Betta = 0.5;
Gamma = 2.0;
Begin
For i:=1 To N Do Smplx[1,i] := X[i];
For i:=2 To Succ(N) Do
For j:=1 To N Do
If j = pred(i) Then Smplx[i,j]:=Smplx[1,j] + H
Else Smplx[i,j]:=Smplx[1,j];
For i:=1 To Succ(N) Do Begin
For j:=1 To N Do X[j]:=Smplx[i,j];
F[i]:=OFunc(N, X);
End;
Eps:=Abs(Eps); ITR:=0;
Repeat
Fh:=-Max_Float; Fl:=Max_Float;
For i:=1 To Succ(N) Do Begin
If F[i]>Fh Then Begin Fh:=F[i]; Ih:=i End;
If F[i]<Fl Then Begin Fl:=F[i]; IL:=i End;
End;
Fg:=-Max_Float;
For i:=1 To Succ(N) Do
If (F[i]>Fg)and(i<>Ih) Then Begin Fg:=F[i]; Ig:=i End;
For j:=1 To N Do Begin
Xo[j]:=0;
For i:=1 To Succ(N) Do If i<>Ih Then Xo[j]:=Xo[j]+Smplx[i,j];
Xo[j]:=Xo[j]/N;
Xh[j]:=Smplx[Ih,j];
Xl[j]:=Smplx[IL,j];
Xg[j]:=Smplx[Ig,j];
End;
Fo:=OFunc(N, Xo);
{Отражение- Alpha}
For j:=1 To N Do Xr[j]:=Xo[j] + Alpha*(Xo[j]-Xh[j]);
Fr:=OFunc(N, Xr);
If Fr<Fl Then Begin
{Pастяжение- Gamma}
For j:=1 To N Do Xe[j]:=Gamma*Xr[j] + (1-Gamma)*Xo[j];
Fe:=OFunc(N, Xe);
If Fe<Fl Then Begin
For j:=1 To N Do Smplx[Ih,j]:=Xe[j]; F[Ih]:=Fe
End
Else Begin
For j:=1 To N Do Smplx[Ih,j]:=Xr[j]; F[Ih]:=Fr
End
End
Else
If Fr>Fg Then Begin
If Fr<=Fh Then Begin
For j:=1 To N Do Xh[j]:=Xr[j]; F[Ih]:=Fr
End;
{Cжатие- Betta}
For j:=1 To N Do Xc[j]:=Betta*Xh[j] + (1-Betta)*Xo[j];
Fc:=OFunc(N, Xc);
If Fc>Fh Then Begin
For i:=1 To Succ(N) Do Begin
{Редукция}
For j:=1 To N Do Begin
Smplx[i,j]:=0.5*(Smplx[i,j] + Xl[j]);
X[j]:=Smplx[i,j]
End;
F[i]:=OFunc(N, X);
End
End
Else Begin
For j:=1 To N Do Smplx[Ih,j]:=Xc[j]; F[Ih]:=Fc
End
End
Else Begin
For j:=1 To N Do Smplx[Ih,j]:=Xr[j]; F[Ih]:=Fr
End;
{Проверка}
S:=0; D:=0;
For i:=1 To Succ(N) Do Begin S:=S + F[i]; D:=D + Sqr(F[i]) End;
S:=Sqrt(Abs((D - Sqr(S)/Succ(N))/Succ(N)));
Inc(Itr);
Until (S<=Eps) or (It<ITR);
If Itr>IT Then IT:=-Itr Else IT:=Itr;
X:=XL;
Fmin:=F[IL];
End;
BEGIN
ClrScr;
WriteLn('Programma Realizacii Algoritm "Neldera-Mida"');
Write('Vvedite realnuju razmernoct vectora X: '); Read(N);
WriteLn('Vvedite nachalnoe Pribligenie vectora X: ');
For i:=1 to N do begin
Write( 'X[',i,']='); Read(X[i]);
end;
WriteLn('Zadaite GELAEMOE Kolichestvo Iteracii:'); ReadLn(IT);
Simplex(N, OFunc, 1.0e-8, 0.5, X, Fmin, It);
WriteLn('Vicheslennioe znachenie optimizacii:');
For i:=1 to N do WriteLn( 'X[',i,']=',X[i]);
WriteLn('Naidennii min Funkcii=',Fmin);
WriteLn('Zatrachennoe Chislo Iteraciy= ',It);
ReadLn;
END.
Приложение №2.
Текст программы на Turbo Pascal, в которой реализован градиентный метод
Uses Crt;
Type Vector=array[1..10] of real;
const eps=1e-3;
Var
i,n:integer;
it:longint;
fx,fxn,norm,h,m:real;
x,xn,Grad:Vector;
{================================================================}
{* Функция F(x) *}
Function f(x:Vector):real;
Begin
{ Test !!! }
{ Test !!! }
F:=sqr(x[1]+5.6)+sqr(x[2]-2.4) { 12 итераций }
{ 1 f:= sqr(x[1])+sqr(x[2])+sqr(x[3])+x[1]-x[1]*x[2]-2*x[3] }
{ 2 f:=100*sqr(x[2]-x[1]*x[1])+sqr(1-x[1]) }
{ 3 f:=sqr(x[2]-x[1]*x[1])+sqr(1-x[1]*x[2]) }
{ 4 f:= 5*sqr(x[1])+sqr(x[2])+4*x[1]*x[2]-16*x[1]-12*x[2] }
{ 5 f:= sqr(x[1])+2*sqr(x[2])+3*sqr(x[3])+10*x[1]-6*x[1]*x[3]-20*x[3] }
End;
{Вычисление градиента}
procedure rasch_grad;
const dx=1e-6;
begin
fx:=f(x);
for i:=1 to n do begin
x[i]:=x[i]+dx;
grad[i]:=(f(x)-fx)/dx;
x[i]:=x[i]-dx;
end;
end;
{Вычисление нормы }
function norma(grad:vector):real;
var S:real;
begin
S:=0;
for i:=1 to n do S:=S+sqr(grad[i]);
norma:=sqrt(S);
end;
{================================================================}
Begin
h:=1; {шаг}
it:=0; {количество итераций}
Write('n='); Read(n); { размерность }
for i:=1 to n do
x[i]:=10; { начальная точкa }
fx:=f(x); rasch_grad; norm:=norma(grad);
Assign(Output,'grad.txt');
Rewrite(Output);
while (norm>eps)and(h>eps/1e+9)do
begin
for i:=1 to n do xn[i]:=x[i]-h*grad[i]/norm;
fxn:=f(xn);
if fxn<fx then begin (*попытка удачна*)
it:=it+1; h:=1.25*h; x:=xn;
fx:=f(x); rasch_grad; norm:=norma(grad);
If (it>=10000)and(it<35500)or(it<=1000) Then
begin
Write('it=',it:4);
for i:=1 to n do
Write(' x[',i,']=',x[i]:10:6);
Writeln; end;
end
else h:=h/2; (*нeyдaчнaя попытка *)
end;
Writeln;
Write('it=',it:4);
for i:=1 to n do Write(' x[',i,']=',x[i]:10:6);
Writeln; Writeln(' f(x)=',fx);
;
NoSound;
ReadKey;
End.
Текст программы на Turbo Pascal, в которой реализован метод наискорейшего спуска
program SpeedSpusc;
Uses Graph,Crt;
Type Vector=array[1..10] of real;
Var i,n,k,x0,y0:integer;
it:longint;
fx,fxn,norm,h,h0,hmin,eps,m:real;
x00,x,xn,Grad,dx:Vector;
{================================================================}
{* Функция F(x) *}
Function f(x:Vector):real; { Eps=1e-3 }
Begin
{ Test !!! }
F:=sqr(x[1]+5.6)+sqr(x[2]-2.4) { 2 итерации }
{ 1 f:= sqr(x[1])+sqr(x[2])+sqr(x[3])+x[1]-x[1]*x[2]-2*x[3] }
{ 2 f:=100*sqr(x[2]-x[1]*x[1])+sqr(1-x[1]) }
{ 3 f:=sqr(x[2]-x[1]*x[1])+sqr(1-x[1]*x[2]) }
{ 4 f:= 5*sqr(x[1])+sqr(x[2])+4*x[1]*x[2]-16*x[1]-12*x[2] }
{ 5 f:= sqr(x[1])+2*sqr(x[2])+3*sqr(x[3])+10*x[1]-6*x[1]*x[3]-20*x[3] }
End;
{Вычисление градиента}
procedure rasch_grad;
const dx=1e-6;
begin
fx:=f(x);
for i:=1 to n do begin
x[i]:=x[i]+dx;
grad[i]:=(f(x)-fx)/dx;
x[i]:=x[i]-dx;
end;
end;
{Вычисление нормы для окончания расчетов}
function norma(grad:vector):real;
var S:real;
begin
S:=0;
for i:=1 to n do S:=S+sqr(grad[i]);
norma:=sqrt(S);
end;
{* Процедура инициализации графики *}
Procedure Gr(x,y:real);
Var gd,gm:integer;
Begin
gd:=detect;
initgraph(gd,gm,'c:\tp\bgi');
SetBkColor(15);
x0:=320;y0:=240;
SetColor(14);
Line(0,y0,640,y0);Line(x0,0,x0,480);
SetColor(2);
MoveTo(round(x0+x*m),round(y0-y*m))
End;
{* Процедура вывода графиков *}
Procedure Gr_out(x,y:real);
Begin
LineTo(round(x0+x*m),round(y0-y*m));
End;
{================================================================}
Begin
h0:=1; { Шаг }
hmin:=1e-4; { Шаг min }
eps:=1e-3; { Точность }
Write('n='); Read(n); { Размерность }
for i:=1 to n do
x[i]:=10; { Начальная точкa }
it:=0; { Количество итераций }
m:=10; { Масштаб }
Assign(Output,'grad.txt');
Rewrite(Output);
Gr(x[1],x[2]);
Repeat
fx:=f(x); rasch_grad; norm:=norma(grad);
h:=h0; x00:=x;
it:=it+1;
Repeat
for i:=1 to n do xn[i]:=x[i]-h*grad[i]/norm;
fxn:=f(xn);
if fxn<fx then begin
x:=xn;
fx:=fxn;
end
else begin
{ k:=k+1;
if k mod 2<>0 then h:=h/10 else h:=-h;
} h:=-h/10; end
Until (abs(h)<hmin);
for i:=1 to n do dx[i]:=x[i]-x00[i];
norm:=norma(dx);
If (it>=10000)and(it<36500)or(it<100) Then
begin
Write('it=',it:4);
for i:=1 to n do
Write(' x[',i,']=',x[i]:10:6);
Writeln; end; Gr_out(x[1],x[2]); {* Рисование графика *}
Until Norma(dx)<Eps;
Writeln;
Write('it=',it:4);
for i:=1 to n do Write(' x[',i,']=',x[i]:10:6);
Writeln; Writeln(' f(x)=',fx);
ReadKey;
End.

function norma(x:vec):real;
var
nG:real;
i:byte;
begin
nG:=0;
for i:=1 to n do
nG:=nG+sqr(x[i]);
norma:=sqrt(nG);
end;
BEGIN
iter:=0; h0:=1; h:=1; beta:=0.01;
Write(' введи количество неизвестных:'); Read(n);
Write(' введи количество ограничений в форме равенств:'); Read(m);
Write(' введи количество ограничений в форме неравенств:'); Read(p);
for i:=1 to n do
x[i]:=10; { Начальная точкa }
Repeat
x0:=x; h:=h0; iter:=iter+1; k:=0;
zx:=z(x);gradient ;norm:=norma(grad);
while (norm>eps) and (h>eps/1e9) do
begin
for i:=1 to n do
x1[i]:=x[i]-h*grad[i]/norm;
zx1:=z(x1);
if zx1<zx then begin
x:=x1; zx:=zx1 ; gradient;
norm:=norma(grad);
h:=1.25*h; k:=k+1;
end
else h:=h/2;
end;
for i:=1 to n do
Dx[i]:=x[i]-x0[i];
write(beta:10:1);
for i:=1 to n do
write(x[i]:10:6 );
writeln(' z(x)=',z(x),' k=',k);
beta:=10*beta;
until norma(Dx)<eps;
writeln('число итераций=',iter, ' при заданной точности ',eps:1:9);
END.
.
Приложение №4.
|
из
5.00
|
Обсуждение в статье: Метод решения задачи на быстродействие с учетом демпфирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы