 |
Главная |


ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
|
из
5.00
|
Принцип работы индуктивных преобразователей (рис. 9.1.) основан на изменении индуктивного сопротивления катушки, намотанной на ферромагнитном сердечнике в результате изменения воздушного зазора между якорем и сердечником. При этом существуют две группы индуктивных преобразователей:
1) с изменяющейся индуктивностью;
2) с изменяющимся активным сопротивлением.
Для преобразователей первого типа (рис.9.1. а) естественной входной величиной является изменение воздушного зазора  , т. е. перемещение якоря.
, т. е. перемещение якоря.
а) б)

Рис. 9.1. Индуктивные преобразователи: с изменяющейся индуктивностью (а), с изменяющимся активным сопротивлением (б)
Для второй группы индуктивных преобразователей (рис. 9.1. б) в зазор магнитопровода вводится пластина с высокой электропроводностью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки, что эквивалентно увеличению ее активного сопротивления. Достоинствами индуктивных преобразователей являются:
1) простота и надежность конструкции;
2) долговечность, обусловленная отсутствием механически связанных подвижных частей;
3) достаточно высокая чувствительность при относительно широком диапазоне измерения.
Простейшей нереверсивной схемой является последовательное включение катушки преобразователя с сопротивлением нагрузки (рис. 9.2).
 а) б)
а) б) 
Рис. 9.2. Схема последовательного включения однокатушечного
индуктивного измерительного преобразователя и нагрузки (а) и
зависимость индуктивности L преобразователя от величины
воздушного зазора (б)
Так как в этих преобразователях изменяемыми переменными являются реактивные сопротивления, то они должны питаться только от источников переменного тока. При изменении воздушного зазора  изменяется индуктивность катушки L, следовательно и ее сопротивление zL переменному току.
изменяется индуктивность катушки L, следовательно и ее сопротивление zL переменному току.
Полное сопротивление индуктивного преобразователя и нагрузки:
 ;
;  ,
,
где L и Lн – индуктивность преобразователя и нагрузки, соответственно;
j – мнимая единица;
ω – частота питающего напряжения.
Напряжение  на нагрузке можно определить как:
на нагрузке можно определить как:
 ;
;
в случае чисто активного характера нагрузки (  ) и чисто индуктивного характера преобразователя (
) и чисто индуктивного характера преобразователя (  ):
):
 ;
;
Индуктивность  таких преобразователей определяется по формуле:
таких преобразователей определяется по формуле:
 ,
,
где  - число витков катушки,
- число витков катушки,  - общее магнитное сопротивление магнитного преобразователя,
- общее магнитное сопротивление магнитного преобразователя,  - магнитное сопротивление стального магнитопровода,
- магнитное сопротивление стального магнитопровода,  - магнитное сопротивление воздушного зазора.
- магнитное сопротивление воздушного зазора.
Так как  << , то можно учитывать лишь
<< , то можно учитывать лишь  ,
,
где  – зазор,
– зазор,  – магнитная проницаемость воздуха
– магнитная проницаемость воздуха  Гн/м,
Гн/м,
 – площадь поперечного сечения воздушного зазора магнитопровода.
– площадь поперечного сечения воздушного зазора магнитопровода.
Однокатушечные индуктивные преобразователи имеют существенную нелинейность выходного сигнала  (рис. 9.2. б). Кроме того, в них якорь испытывает усилие притяжения к сердечнику – эффект электромагнита. Для устранения этих недостатков применяются индуктивные преобразователи с дифференциальным включением двух симметричных катушек, которые получили широкое распространение на практике из-за более высокой чувствительности, меньшей нелинейности функции преобразования и отсутствия эффекта притяжения якоря.
(рис. 9.2. б). Кроме того, в них якорь испытывает усилие притяжения к сердечнику – эффект электромагнита. Для устранения этих недостатков применяются индуктивные преобразователи с дифференциальным включением двух симметричных катушек, которые получили широкое распространение на практике из-за более высокой чувствительности, меньшей нелинейности функции преобразования и отсутствия эффекта притяжения якоря.
9.1. СХЕМЫ ВКЛЮЧЕНИЯ ИНДУКТИВНЫХ
ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Дифференциальные двухкатушечные индуктивные преобразователи включаются в дифференциальные мостовые схемы и имеют две цепи, благодаря чему значительно уменьшается аддитивная погрешность (погрешность нуля), обеспечивается линейность функции преобразования, в два раза возрастает чувствительность и уменьшается сила притяжения якоря.
Мостовые схемы (рис. 9.3.) обычно проектируются так, чтобы напряжение на измерительной диагонали отсутствовало, когда на дифференциальный индуктивный преобразователь не воздействует входная величина. При этом сопротивления плеч  и
и  дифференциального индуктивного преобразователя равны между собой и принимаются равными
дифференциального индуктивного преобразователя равны между собой и принимаются равными  .
.
 а) б)
а) б)
 ,
,  ,
,  ,
, 
Рис. 9.3. Дифференциальная схема включения индуктивного
измерительного преобразователя
Очевидно, что при изменении воздушного зазора, то есть при перемещении якоря сопротивления секций индуктивного преобразователя будут равны:

а б

в г
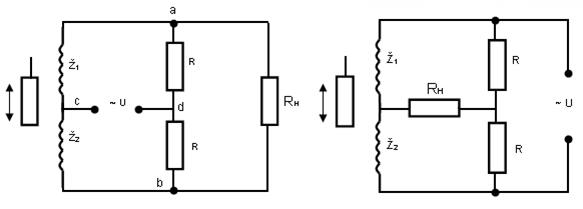
Рис. 9.4. Схемы включения индуктивных измерительных
преобразователей (а) и (б) с активными балластными сопротивлениями R
и с заменой местами источника питания и нагрузки Rн;
в – с индуктивными балластными сопротивлениями L;
г – с симметричным трансформаторным питанием
Изменение сопротивления  .
.
Изменения сопротивлений  обычно невелики, и можно считать, что напряжение на измерительной диагонали моста изменяется пропорционально величине
обычно невелики, и можно считать, что напряжение на измерительной диагонали моста изменяется пропорционально величине  . В этом случае функция преобразования будет характеризоваться только чувствительностью:
. В этом случае функция преобразования будет характеризоваться только чувствительностью:
 ,
,
где  – напряжение на измерительной диагонали.
– напряжение на измерительной диагонали.
Существуют различные схемы включения индуктивных преобразователей (рис. 9.4). В качестве примера определим чувствительность для схемы, показанной на рис. 9.4, а.
Для режима холостого хода (  ):
):
 ,
,
где R – величина сопротивления балластных резисторов (при преобразованиях пренебрегаем значениями  как бесконечно малыми).
как бесконечно малыми).
Чувствительность схемы для режима холостого хода:
При <<1  .
.
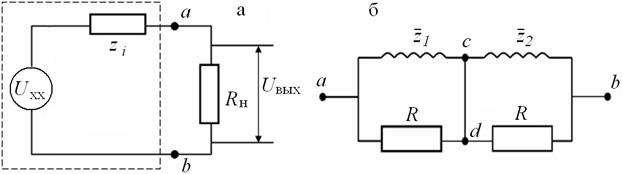
Рис. 9.5. К теореме об активном двухполюснике
Когда сопротивление нагрузки Rн не бесконечно, а соизмеримо с другими сопротивлениями цепи, тогда для определения чувствительности схемы следует измерять падение напряжения U на нагрузке Rн. При этом используется теорема об активном двухполюснике (рис. 9.5).
 ,
,
где  - сопротивление всей мостовой цепи со стороны нагрузки, то есть между точками а и b при закороченном источнике напряжения (рис. 9.5. б).
- сопротивление всей мостовой цепи со стороны нагрузки, то есть между точками а и b при закороченном источнике напряжения (рис. 9.5. б).

 .
.
Найдём  :
:
 ,
,
 ,
,
 =
=  .
.
Тогда чувствительность схемы определяется как:
 .
.
10. СИНУСНО-КОСИНУСНЫЕ ВРАЩАЮЩИЕСЯ
ТРАНСФОРМАТОРЫ (СКВТ)
СКВТ широко применяются в станках с ЧПУ и в системах управления промышленными роботами как датчики угла поворота и перемещения. Они имеют малые габариты, хорошую разрешающую способность и высокую помехозащищённость.
СКВТ представляют собой индуктивную электрическую машину, с двумя обмотками на роторе (синусная и косинусная) и двумя обмотками на статоре (возбуждения и компенсационная). Обмотки сдвинуты друг относительно друга на 90о. Выходные напряжения, снимаемые с роторных обмоток, являются функциями угла поворота ротора.
СКВТ имеют два режима работы: трансформаторный (амплитудный) и фазовый.
В трансформаторном режиме первичную статорную обмотку (возбуждения) запитывают переменным напряжением.
Вторичную статорную обмотку (компенсационную) или не используют, или закорачивают.
Под действием напряжения на статорной обмотке  в ней протекает ток, который создаёт магнитный поток
в ней протекает ток, который создаёт магнитный поток  , наводящий в роторных обмотках ЭДС.
, наводящий в роторных обмотках ЭДС.

Рис. 10.1. Синусно-косинусный вращающийся трансформатор
Выходные сигналы снимают либо с синусной, либо с косинусной, либо с обеих обмоток ротора:

 ,
,
где  ,
,  – амплитуды выходных сигналов, зависящие от угла α поворота ротора, k – коэффициент передачи.
– амплитуды выходных сигналов, зависящие от угла α поворота ротора, k – коэффициент передачи.
При подключении нагрузки, например, к синусной обмотке по ней будет протекать ток, который создает свой магнитный поток  (рис. 10.2).
(рис. 10.2).

Рис. 10.2. Искажение магнитного потока возбуждения при подключении
нагрузки к синусной обмотке СКВТ
За счёт взаимодействия магнитных потоков возбуждения  и
и  происходит искажение их направления (рис. 10.2.).
происходит искажение их направления (рис. 10.2.).
Поперечная составляющая магнитного потока  синусной обмотки направлена против , тем самым изменяется его величина. Составляющая
синусной обмотки направлена против , тем самым изменяется его величина. Составляющая  наведёт в синусной обмотке ЭДС
наведёт в синусной обмотке ЭДС  , а составляющая
, а составляющая  ,где
,где  – полная ЭДС в синусной обмотке.
– полная ЭДС в синусной обмотке.
Суммарная ЭДС синусной обмотки не имеет идеальной синусной зависимости:
 ,
,
где  ,
,  - индуктивная составляющая полного сопротивления в синусной обмотке;
- индуктивная составляющая полного сопротивления в синусной обмотке;  - полное сопротивление в синусной обмотке.
- полное сопротивление в синусной обмотке.
Наибольшая погрешность возникает при углах α=36о 16'; 144о 44'; 215о 16'. Для устранения этой погрешности в СКВТ применяют первичное и вторичное симметрирование.
Первичное симметрирование осуществляют со стороны первичных, т. е. статорных обмоток. Для этого вторую статорную обмотку (компенсационную) замыкают накоротко. Это приводит к компенсации магнитного потока  .
.
Вторичное симметрирование осуществляется со стороны вторичных, т. е. роторных обмоток. При этом синусные и косинусные роторные обмотки включают на общую симметрированную нагрузку (Rн= Rδ) по схеме (рис. 10.3. б).

 а) б)
а) б)
Рис. 10.3. Первичное (а) и вторичное (б) симметрирование СКВТ
Может осуществляться одновременно и первичное и вторичное симметрирование (рис. 10.3.).
В фазовом режиме работы СКВТ на обе статорные обмотки через фазорасщепитель Ф (рис. 10.4.) подключаются напряжения Uст1 и Uст2, сдвинутые друг относительно друга на угол  . При этом напряжение, снимается с синусной или косинусной обмотки.
. При этом напряжение, снимается с синусной или косинусной обмотки.



Рис. 10.4. Работа СКВТ в фазовом режиме
Последнее выражение справедливо только при выполнении условий: 1) равенстве амплитуд напряжения питания; 2) строгом соблюдении угла сдвига фаз на  .
.
Комбинированное использование трансформаторного и фазовращательного режимов работы СКВТ эффективно используется в системах управления промышленными роботами для определения координат рабочей точки захватного устройства.
11. ЭЛЕКТРО-СТАТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
К электро-статическим измерительным преобразователям относятся емкостные и пьезоэлектрические измерительные преобразователи.
|
из
5.00
|
Обсуждение в статье: ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы