 |
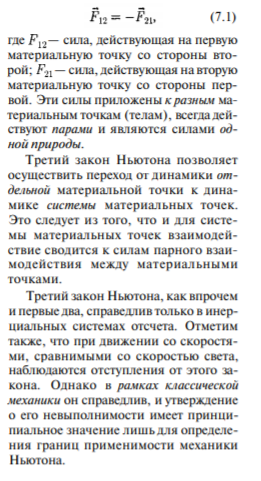
Главная |


Тангенциальная составляющаяУскорения
|
из
5.00
|
т.е. равна первой производной по времени от модуля скорости: она определяет быстроту изменения скорости помодулю.
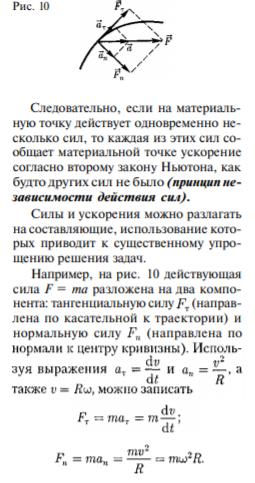
Найдем вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому As можносчитать дугой окружности некоторогорадиуса г, мало отличающейся от хорды А В. Тогда из подобия треугольников АО В и EAD с л е д у е т
н о
так как А В — t>At, то 
В пределе при At —> 0 получим vx—>v. Поскольку Г;1 —> ?, угол £Л1) стремится к нулю, а так как треугольникEAD равнобедренный, то угол ADE между v и ДГ>И стремится к прямому.Следовательно, при At—* 0 векторы Д йпи v оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории,то вектор Avn, перпендикулярный вектору скорости, направлен к центру еекривизны. Составляющая ускорения называется нормальнойсоставляющей ускорения и направлена по главной нормали к траектории к центру ее
кривизны. 
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 5):
Итак, тангенциальная составляющая ускорения характеризует быстроту изменения модуля скорости (направлена по касательной к траектории), анормальная составляющая ускорения —быстроту изменения направления скорости (направлена по главной нормали к центру кривизны траектории). Составляющие аТи ап перпендикулярны друг другу. В зависимости от тангенциальной инормальной составляющих ускорениядвижение можно классифицировать
следующим образом:
1) ат = 0, ап = О — прямолинейноеравномерное движение;
2) ат = а — const, ап = 0 — прямолинейное равнопеременное движение.
При таком виде движения
Если начальный момент времениt1 = 0, а начальная скорость vl = vQiто,
получим

Проинтегрировав эту формулу впределах от нуля до произвольного момента времени t, найдем, что длинапути, пройденного точкой, в случае равнопеременного движения

3) ат= f(t), ап = 0 — прямолинейное
движение с переменным ускорением;
4) ат — 0, ап = const. При ат = 0 скорость изменяется только по направлению. Из формулы  следует, чторадиус кривизны должен'быть постоянным. Следовательно, движение по окружности является равномерным;
следует, чторадиус кривизны должен'быть постоянным. Следовательно, движение по окружности является равномерным;
5) ат= 0, ап ^ 0 — равномерное криволинейное движение;
6) ar = const, ап ^ 0 — криволинейное равнопеременное движение;
7) ат = f(t), ап ^ 0 — криволинейноедвижение с переменным ускорением.
3)Равномерное прямолинейное движение – это частный случай неравномерного движения.
Формула в координатах 
Равнопеременное движение – это движение, при котором скорость тела (материальной точки) за любые равные промежутки времени изменяется одинаково.
Ускорение тела при равнопеременном движении остаётся постоянным по модулю и по направлению (a = const).
Равнопеременное движение может быть равноускоренным или равнозамедленным.
Средняя скорость переменного движения определяется путём деления перемещения тела на время, в течение которого это перемещение было совершено. Единица измерения средней скорости – м/с.
vcp = s / t
Мгновенная скорость – это скорость тела (материальной точки) в данный момент времени или в данной точке траектории, то есть предел, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt:

Вектор мгновенной скорости равнопеременного движения можно найти как первую производную от вектора перемещения по времени:
 =
=  '
'
Проекция вектора скорости на ось ОХ:
vx = x’
это производная от координаты по времени (аналогично получают проекции вектора скорости на другие координатные оси).
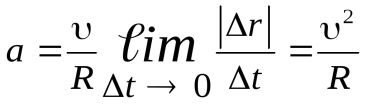
4)Центростремительное ускорение — компонента ускорения точки, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной. Направлено к центру кривизны траектории, чем и обусловлен термин. По величине равно квадрату скорости, поделённому на радиус кривизны. Термин «центростремительное ускорение» эквивалентен термину «нормальное ускорение». Ту составляющую суммы сил, которая обуславливает это ускорение, называют центростремительной силой.
Наиболее простым примером центростремительного ускорения является вектор ускорения при равномерном движении по окружности (направленный к центру окружности).
В классической механике центростремительное ускорение вызывается компонентами сил, направленными ортогонально вектору скорости, и, следовательно, оно перпендикулярно касательной к траектории в данной точке. Например, кривизна орбит космических объектов характеризуется центростремительным ускорением, вызванным гравитацией.
Связанное понятие для неинерциальных систем отсчёта — центробежная сила.
Элементарная формула
 {\displaystyle a_{n}={\frac {v^{2}}{R}}\ }{\displaystyle a_{n}=\omega ^{2}R\ ,}
{\displaystyle a_{n}={\frac {v^{2}}{R}}\ }{\displaystyle a_{n}=\omega ^{2}R\ ,}
{\displaystyle \mathbf {a} _{n}={\frac {v^{2}}{R}}\mathbf {e} _{R}={\frac {v^{2}}{R^{2}}}\mathbf {R} }
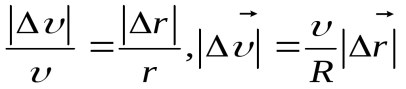
Вывод формулы
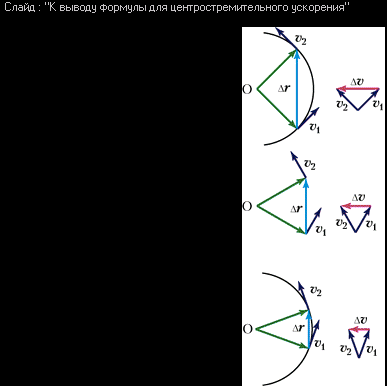
На рисунке треугольники, образованные векторами перемещений и скоростей, подобны. Учитывая, что  =
=  = R и
= R и  =
=  = υ, из подобия треугольников находим:
= υ, из подобия треугольников находим:
 (20)
(20)
откуда
 (21)
(21)
Поместим начало координат в центр окружности и выберем плоскость, в которой лежит окружность, за плоскость (x, y). Положение точки на окружности в любой момент времени однозначно определяется полярным углом φ, измеряемым в радианах (рад), причем
x = R cos(φ + φ0), y = R sin(φ + φ0), (22)
где φ0 определяет начальную фазу (начальное положение точки на окружности в нулевой момент времени).
В случае равномерного вращения угол φ, измеряемый в радианах, линейно растет со временем:
φ = ωt, (23)
где ω называется циклической (круговой) частотой. Размерность циклической частоты: [ω] = c–1 = Гц.
Циклическая частота равна величине угла поворота (измеренного в рад) за единицу времени, так что иначе ее называют угловой скоростью.
Зависимость координат точки на окружности от времени в случае равномерного вращения с заданной частотой можно записать в виде:
x  = R cos(ωt + φ0),
= R cos(ωt + φ0),
y = R sin(ωt + φ0).
Время, за которое совершается один оборот, называется периодом T.
Частота ν = 1/T.
Размерность частоты: [ν] = с–1 = Гц.
Связь циклической частоты с периодом и частотой: 2π = ωT, откуда
ω = 2π/T = 2πν.
Связь линейной скорости и угловой скорости находится из равенства:
2πR = υT, откуда
υ = 2πR/T = ωR.
Выражение для центростремительного ускорения можно записать разными способами, используя связи между скоростью, частотой и периодом:
aц = υ2/R = ω2R = 4π2ν2R = 4π2R/T2.
5.Сила и масса. Три закона Ньютона.
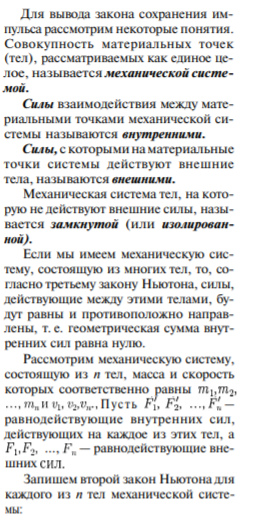
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные {инертная масса) и гравитационные {гравитационная масса) свойства. В настоящее время можно считать доказанным, что инертная и гравитационная массы равны друг другу (с точностью, не меньшей 10~12 их значения). Масса – это свойство тела, характеризующее его инертность. При одинаковом воздействии со стороны окружающих тел одно тело может быстро изменять свою скорость, а другое в тех же условиях – значительно медленнее. Принято говорить, что второе из этих двух тел обладает большей инертностью, или, другими словами, второе тело обладает большей массой.
Если два тела взаимодействуют друг с другом, то в результате изменяется скорость обоих тел, т. е. в процессе взаимодействия оба тела приобретают ускорения. Отношение ускорений двух данных тел оказывается постоянным при любых воздействиях. В физике принято, что массы взаимодействующих тел обратно пропорциональны ускорениям, приобретаемым телами в результате их взаимодействия.
|

В этом соотношении величины  и
и  следует рассматривать как проекции векторов
следует рассматривать как проекции векторов  и
и  на ось OX (рис. 1.7.2). Знак «минус» в правой части формулы означает, что ускорения взаимодействующих тел направлены в противоположные стороны.
на ось OX (рис. 1.7.2). Знак «минус» в правой части формулы означает, что ускорения взаимодействующих тел направлены в противоположные стороны.
В Международной системе единиц (СИ) масса тела измеряется в килограммах (кг).
Масса любого тела может быть определена на опыте путем сравнения с массой эталона (mэт = 1 кг). Пусть m1 = mэт = 1 кг. Тогда

|
Масса тела – скалярная величина. Опыт показывает, что если два тела с массами m1 и m2 соединить в одно, то масса m составного тела оказывается равной сумме масс m1 и m2 этих тел:
| m = m1 + m2. |
Это свойство масс называют аддитивностью.
|
Рисунок 1.7.2.
Сравнение масс двух тел. 
|
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы. Под действием сил тела либо изменяют скорость движения, т. е. приобретают ускорения (динамическое проявление сил), либо деформируются, т. е. изменяют свою форму и размеры (статическое проявление сил). В каждый момент времени сила характеризуется числовым значением, направлением в пространстве и точкой приложения. Итак, сила — это векторная величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры.Сила – это количественная мера взаимодействия тел. Сила является причиной изменения скорости тела. В механике Ньютона силы могут иметь различную физическую природу: сила трения, сила тяжести, упругая сила и т. д. Сила является векторной величиной. Векторная сумма всех сил, действующих на тело, называется равнодействующей силой.
Для измерения сил необходимо установить эталон силы и способ сравнения других сил с этим эталоном.
В качестве эталона силы можно взять пружину, растянутую до некоторой заданной длины. Модуль силы F0, с которой эта пружина при фиксированном растяжении действует на прикрепленное к ее концу тело, называют эталоном силы. Способ сравнения других сил с эталоном состоит в следующем: если тело под действием измеряемой силы  и эталонной силы
и эталонной силы  остается в покое (или движется равномерно и прямолинейно), то силы равны по модулю F = F0 (рис. 1.7.3).
остается в покое (или движется равномерно и прямолинейно), то силы равны по модулю F = F0 (рис. 1.7.3).
|
Рисунок 1.7.3.
Сравнение силы с эталоном. 
|
Если измеряемая сила F больше (по модулю) эталонной силы, то можно соединить две эталонные пружины параллельно (рис. 1.7.4). В этом случае измеряемая сила равна 2F0. Аналогично могут быть измерены силы 3F0, 4F0 и т. д.
|
Рисунок 1.7.4.
Сравнение силы с эталоном. 
|
Измерение сил, меньших 2F0, может быть выполнено по схеме, показанной на рис. 1.7.5.
|
Рисунок 1.7.5.
Сравнение силы с эталоном. 
|
Эталонная сила в Международной системе единиц называется ньютон (Н).
Сила в 1 Н сообщает телу массой 1 кг ускорение 1 м/с2
На практике нет необходимости все измеряемые силы сравнивать с эталоном. Для измерения сил используют пружины, откалиброванные описанным выше способом. Такие откалиброванные пружины называются динамометрами. Сила измеряется по растяжению динамометра (рис. 1.7.6).
|
Рисунок 1.7.6.
Измерение силы по растяжению пружины. При равновесии 
|
Первый закон Ньютона: всякая материальная точка (тело) сохраняет состояние покоя или равномерного пря молинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние. Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции. Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета. Инерциальной системой отсчета является такая система отсчета, относительно которой материальная точка, свободная от внешних воздействий, либо покоится, либо движется равномерно и прямолинейно. Первый закон Ньютона утверждает существование инерциальных систем отсчета. Опытным путем установлено, что инерциальной можно считать гелио- центрическую (звездную) систему от- счета (начало координат находится в центре Солнца, а оси проведены в на- правлении определенных звезд). Система отсчета, связанная с Землей, строго говоря, неинерциальна, однако эффекты, обусловленные ее неинерциальностью (Земля вращается вокруг собственной оси и вокруг Солнца), при решении многих задач пренебрежимо малы, и в этих случаях ее можно считать инерциальной. Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, т. е., иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы).
Второй закон Ньютона — основной закон динамики поступательного движения — отвечает на вопрос, как изменяется механическое движение материальной точки (тела) под действием приложенных к ней сил. Если рассмотреть действие различных сил на одно и то же тело, то оказывается, что ускорение, приобретаемое 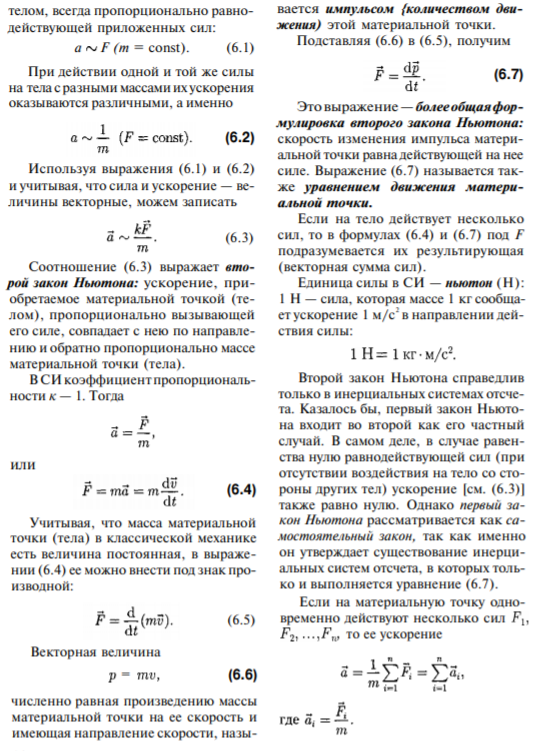
 6. Импульс. Закон сохранения импульса. Импульс системы тел.
6. Импульс. Закон сохранения импульса. Импульс системы тел.

|
из
5.00
|
Обсуждение в статье: Тангенциальная составляющаяУскорения |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы