 |
Главная |


Уравнения динамики манипулятора
|
из
5.00
|
Уравнения Лагранжа второго рода для голономной системы с n степенями свободы, которым отвечают обобщенные координаты  (j = 1,2,…,n), имеют вид
(j = 1,2,…,n), имеют вид
 (j = 1,2,…,n), (j = 1,2,…,n),
| (1.1) |
где  – функция Лагранжа, разности кинетической Т и потенциальной П энергий системы;
– функция Лагранжа, разности кинетической Т и потенциальной П энергий системы;  – обобщенные силы управляющих приводов, приведенные к j-ой обобщенной координате: они имеют размерность моментов, если
– обобщенные силы управляющих приводов, приведенные к j-ой обобщенной координате: они имеют размерность моментов, если  – угол поворота, или сил, если
– угол поворота, или сил, если  – линейное перемещение.
– линейное перемещение.
С учетом того, что  и
и  , перепишем уравнение (1.1) в виде
, перепишем уравнение (1.1) в виде
 , ,
| (1.2) |
где  ,
,  .
.
В последних равенствах через  обозначены внешние обобщенные силы, вызванные весом звеньев и груза, удерживаемого в захватном устройстве. При наличии внешнего воздействия – силы
обозначены внешние обобщенные силы, вызванные весом звеньев и груза, удерживаемого в захватном устройстве. При наличии внешнего воздействия – силы  , приложенной к захватному устройству, в правую часть равенства для
, приложенной к захватному устройству, в правую часть равенства для  надо добавить член
надо добавить член  , характеризующий это воздействие:
, характеризующий это воздействие:
 . .
| (1.3) |
Используем выражение (1.2) для вывода уравнений динамики манипулятора. Рассматривая исполнительный механизм манипулятора как систему из n твердых тел, запишем его кинетическую энергию T в виде суммы кинетических энергий звеньев:
 . .
| (1.4) |
В свою очередь величину  определим по формуле [3]
определим по формуле [3]
 , ,
| (1.5) |
где  – масса звена i;
– масса звена i;  – скорость некоторой точки звена
– скорость некоторой точки звена  , принятой за полюс;
, принятой за полюс;  – вектор радиус центра инерции звена в системе осей с ним связанных, начало которой совпадает с полюсом
– вектор радиус центра инерции звена в системе осей с ним связанных, начало которой совпадает с полюсом  ;
;  – тензор инерции звена в точке
– тензор инерции звена в точке  ;
;  – вектор угловой скорости звена в принятой системе координат.
– вектор угловой скорости звена в принятой системе координат.
Выражение (1.5) принимает наиболее простой вид, если за полюс звена принять его центр инерции; величина  будет равна нулю и выражение (1.5) упростится:
будет равна нулю и выражение (1.5) упростится:
 . .
| (1.6) |
 Кроме того, в большинстве случаев звенья манипулятора представляют собой твердые тела, обладающие симметрией относительно трех ортогональных осей, проведенных через центр инерции. Напомнив правило разметки осей систем координат, связанных со звеньями, в соответствии с которым одна из осей системы
Кроме того, в большинстве случаев звенья манипулятора представляют собой твердые тела, обладающие симметрией относительно трех ортогональных осей, проведенных через центр инерции. Напомнив правило разметки осей систем координат, связанных со звеньями, в соответствии с которым одна из осей системы  совпадает с осью звена (вектором
совпадает с осью звена (вектором  ), а две другие образуют с ней правую триаду, получим при помещении точки
), а две другие образуют с ней правую триаду, получим при помещении точки  в центр инерции
в центр инерции  (см. рис. 1.1) оси полученной системы
(см. рис. 1.1) оси полученной системы  становятся главными осями инерции и тензор вектора в точке
становятся главными осями инерции и тензор вектора в точке  имеет вид диагональной матрицы
имеет вид диагональной матрицы
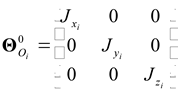 , ,
| (1.7) |
моменты инерции относительно осей в которой определяются выражениями
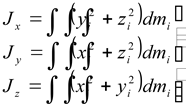 , ,
| (1.8) |
и для звеньев заданной конфигурации являются известными константами. При отсутствии осевых симметрий тензор инерции звена в точке  характеризуется матрицей
характеризуется матрицей
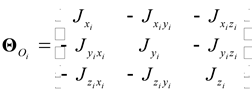 , ,
| (1.9) |
центробежные моменты в которой определяются выражениями
| (1.10) |
и также являются известными константами.
Определим вектор скорости центра инерции звена i через проекции на оси связанной с ним системы координат как
| (1.11) |
или через проекции на оси неподвижной системы осей в виде
 . .
| (1.12) |
По аналогии с  введем вектор угловой скорости звена
введем вектор угловой скорости звена
| (1.13) |
и запишем равенство (1.6) в развернутой форме для случая, когда звенья манипулятора обладают симметрией относительно главных осей инерции. Для этого подставим выражения  ,
,  ,
,  из (1.7), (1.11), (1.13) в (1.6) и получим
из (1.7), (1.11), (1.13) в (1.6) и получим
 . .
| (1.14) |
При использовании вектора скорости центра инерции в форме (1.14) выражение
 , ,
| (1.15) |
с учетом которого равенство (1.4) принимает вид
 . .
| (1.16) |
|
из
5.00
|
Обсуждение в статье: Уравнения динамики манипулятора |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы