 |
Главная |


При стационарных случайных воздействиях
|
из
5.00
|
Лабораторная работа №1
Анализ системы телеуправления подвижного объекта
при стационарных случайных воздействиях
Цель исследования – практическое освоение методов статистического анализа линейной динамической системы при стационарных случайных воздействиях. Достижение поставленной цели связано с решением следующих задач:
- построение математической модели системы;
- построение математических моделей случайных воздействий;
- построение виртуального моделирующего стенда;
- экспериментальное исследование статистических характеристик сигналов, точностных и динамических характеристик системы.
Объектом исследования служит виртуальный моделирующий стенд для статистических испытаний системы телеуправления (СТУ) летательного аппарата. Предмет исследования – статистические характеристики сигналов, а также точностные и динамические характеристики СТУ в условиях стационарных случайных воздействий. Метод исследования – комплексный, основанный на совместном использовании математического описания системы обыкновенными дифференциальными уравнениями, методов статистической динамики, оптимизации, математического (компьютерного) моделирования, статистических испытаний.
Примечание: в данном лабораторном практикуме моделирование, анализ, синтез, оптимизация и испытания систем производятся в среде Matlab с использованием пакетов прикладных программ Simulink, Control System, Signal Processing, Optimization Toolbox.
Функциональная схема СТУ представлена на рис. 1.

Рис. 1. Функциональная схема: НАУ – наземная аппаратура управления; ПЛС – проводная линия связи; БРП – блок рулевых приводов; Р – ракета; КС – кинематические соотношения; ОЛС – оптическая линия связи; f – вектор кинематических возмущений.
Структурная схема одномерного (плоского) контура управления представлена на рис. 2.

Рис. 2. Структурная схема контура управления
Здесь:  – кинематическое возмущение; N(t) – помеха, приведенная ко входу блока аппаратуры выделения координат (АВК); Z(t) – отклонение ракеты в траекторной системе координат (ошибка наведения).
– кинематическое возмущение; N(t) – помеха, приведенная ко входу блока аппаратуры выделения координат (АВК); Z(t) – отклонение ракеты в траекторной системе координат (ошибка наведения).
Передаточные функции звеньев имеют вид:
WA(p) =  ;Wф(p) =
;Wф(p) =  ; Wп(p) =
; Wп(p) =  ; Wр(p) =
; Wр(p) =  ,
,
Здесь  – коэффициенты передачи и постоянные времени звеньев АВК, корректирующего фильтра, исполнительного привода, ракеты, соответственно;
– коэффициенты передачи и постоянные времени звеньев АВК, корректирующего фильтра, исполнительного привода, ракеты, соответственно;  – скорость ракеты.
– скорость ракеты.
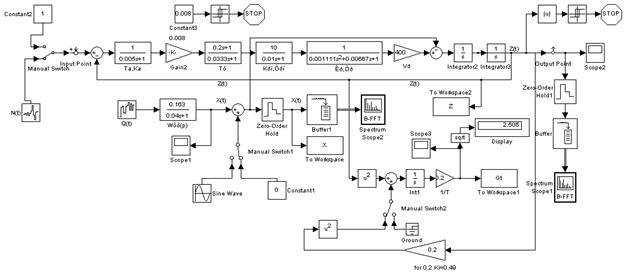
Схема моделирования системы телеуправления подвижного объекта
при стационарных случайных воздействиях:
Выходные характеристики:
Отклонение при поправочном коэффициенте Кi=0,008
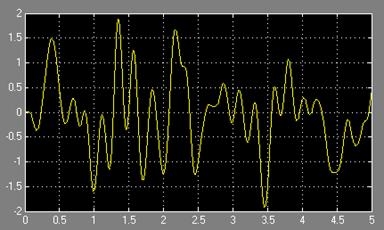
Среднее квадратичное отклонение =2,5
График корреляционной функции
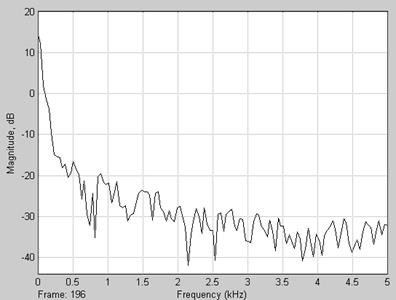
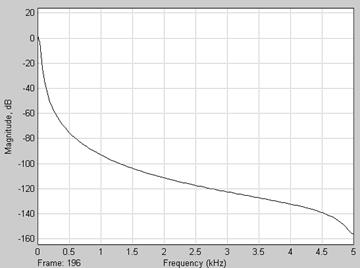
График спектральной плотности
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. За счёт чего в СТУ возникает ошибка наведения? Каков ее физический смысл? В каком случае сигнал ошибки можно считать стационарным?
2. В чём суть метода формирующего фильтра? Для чего используется этот метод?
3. Какой принцип положен в основу расчёта ошибки в линейных САУ с несколькими входами?
4. Какой критерий используется для оценки точности стохастической системы? Какие подходы имеются к его вычислению в Simulink- схеме? Проанализируйте достоинства и недостатки этих подходов. Каким образом воспроизводится воздействие дельта-функции на расширенную систему?
5. Какие числовые статистические характеристики можно определить по графикам корреляционной функции и спектральной плотности сигнала?
6. Как влияет наличие синусоидальной составляющей во внешнем воздействии на вид реализации воздействия, а также на вид графиков корреляционной функции и спектральной плотности?
7. Какие методы и критерии используются при анализе устойчивости и качества регулирования СТУ? Как они реализуются в системе Matlab?
ОТВЕТЫ НА КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Ошибка обусловлена инерциальностью звеньев, контура управления и наличием случайных возмущений.
2. Формирующим фильтром называют динамическую систему, преобразующую сигнал вида белого шума с заданными статистическими характеристиками. Используется для получения случайного процесса, с заданной спектральной плотностью.
3. Принцип суперпозиций.
4. В соответствии с эргодической гипотезой критерий точности СТУ можно принять в виде
 . (2)
. (2)
где 
 – любая реализация случайного процесса Z(t); Т – время наблюдения (время моделирования).
– любая реализация случайного процесса Z(t); Т – время наблюдения (время моделирования).
Следовательно, значение функционала (2) может оцениваться по отдельной реализации сигнала ошибки , полученной непосредственным моделированием системы в установившемся режиме за большое время. Однако при этом необходимо учитывать эффект накопления ошибки моделирования, из-за приближённости метода численного интегрирования.
Для получения критерия (2) схему моделирования (рис. 5) надо доработать путем подключения к выходу  блоков возведения в квадрат, усиления (
блоков возведения в квадрат, усиления (  ) и интегрирования. Выходной сигнал такой схемы направляется в рабочее пространство MATLAB, для чего используется блок «To Workspace».
) и интегрирования. Выходной сигнал такой схемы направляется в рабочее пространство MATLAB, для чего используется блок «To Workspace».
5. По графику корреляционной функции можно определить есть ли задержка между сигналами 1го и 2го датчика и найти её величину.
6. Корреляционная функция не должна упасть до нуля, т.к. появляется периодическая составляющая.
7. При анализе устойчивости используется среднее значение квадрата ошибки отклонения и средний квадрат ошибки возмущения по отдельным сигналам ошибки.
|
из
5.00
|
Обсуждение в статье: При стационарных случайных воздействиях |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы