 |
Главная |


Следящая система – автоматическая система, в которой выходная величина воспроизводит с определённой точностью входную величину, характер изменения которой заранее не известен.
|
из
5.00
|
Одной из наиболее широко распространённых разновидностей следящих систем являются системы управления положением объектов (рис. 19). На элемент сравнения от задающего элемента, связанного с входным валом следящей системы, поступает входная величина α вх. Сюда же от объекта управления, связанного с выходным валом системы, поступает значение угла обработки α вых. В результате сравнения этих величин на выходе элемента сравнения появляется рассогласование Θ = α вх – α вых.
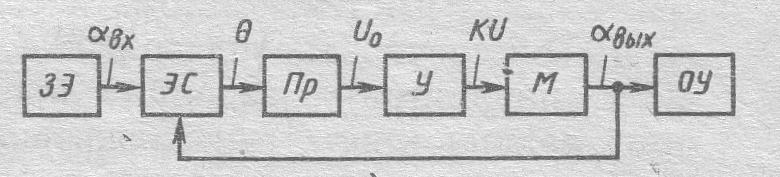
Рис. 19. Функциональная схема следящей системы
Сигнал рассогласования с выхода элемента сравнения поступает на преобразователь (ПР), в котором угол Θ преобразуется в пропорциональное ему напряжение U 0 – сигнал ошибки, которое поступает на усилитель (У). Усиленное напряжение поступает на двигатель (М), который приводит в действие объект управления, а перемещение α вых последнего передаётся на элемент сравнения.
Примером следящей системы может служить система автоматического управления с копирами, в которой соответственно профилю и размерам копира-программоносителя происходит перемещение рабочего органа станка. Копировальные системы могут быть механическими, гидравлическими, электромехани-ческими, пневматическими, пневмогидравлическими.
К недостаткам копирной системы следует отнести высокие стоимость и трудоёмкость изготовления копиров и возможность автоматизации только рабочих ходов.
В электромеханических копирных системах используются электроконтактные или индуктивные датчики, на которые действует копир.
Следящие системы нашли широкое применение в приводах подач станков с ЧПУ и ОЦ (рис. 20). Следящий привод имеет, как минимум, два датчика обратной связи – по скорости (тахогенератор) и по пути. Тахогенератор всегда устанавливают на вал двигателя подачи, при этом часто встраивают непосредственно в двигатель. Датчик ОС по пути может быть круговым, установленным на ходовой винт или на вал двигателя (в станках нормальной точности); и линейным, установленным на столе станка (в прецизионных станках). На тяжёлых станках используют два ДОС круговой (для позиционирования) и линейный (для автоматической коррекции погрешностей кинематической цепи).
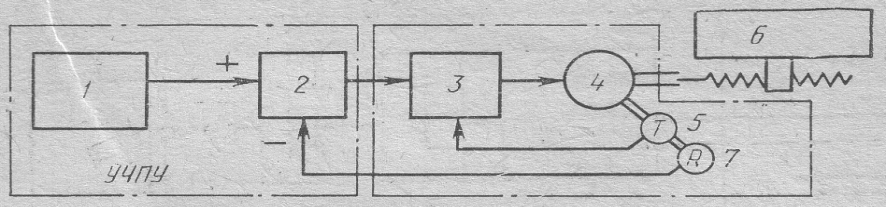
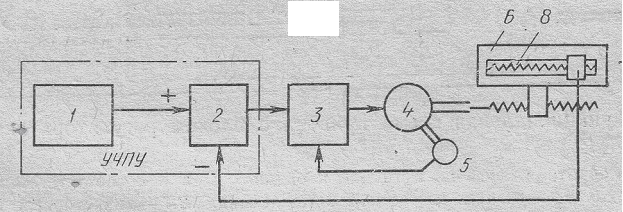
Рис. 20. Следящие системы приводов подач
1 – основной блок УЧПУ;
2 – узел управления приводом;
3 – блок привода;
4 – двигатель подач;
5 – тахогенератор;
6 – стол станка;
7 – круговой датчик обратной связи по пути;
8 – линейный датчик обратной связи по пути.
|
из
5.00
|

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы