 |
Главная |


Выбор контролируемых параметров по максимальному значению вероятности безотказной работы после проведения диагностики
|
из
5.00
|
Методика выбора контролируемых параметров, приведенная в 4.2, может эффективно применяться только при независимости параметров (каждый параметр зависит только от одного элемента или каждый элемент имеет только один параметр).
Рассмотрим задачу выбора для случая, когда параметры взаимозависимы. Причем оптимальным считается такой набор, при контроле которого достигается максимальная апостериорная вероятность безотказной работы и соблюдается условие ограничения (стоимость контроля, время и т.д.).
Задачу выбора оптимального набора контролируемых параметров при ограничении можно решить методами сокращенного перебора. Сокращение перебора достигается использованием специальных правил, позволяющих исключать заведомо неоптимальные наборы. Один из таких алгоритмов приведен в работе [28], но он на наш взгляд слишком сложен для применения в инженерной практике.
Рассмотрим более простой алгоритм [29], пригодный для определения набора контролируемых параметров канала.
Постановка задачи.
Система состоит из N элементов. В каждый момент времени возможно только одно проникновение (возможен отказ лишь одного элемента). Работоспособность каждого элемента не зависит от состояния других. Отказ любого элемента вызывает выход из зоны допуска значения, по крайней мере, одного из М параметров.
Известные априорные вероятности qi при отказе i-ro элемента и для каждого к-го параметра πк определено подмножество Sк элементов, охваченных контролем этого параметра. Другими словами, величиной Sк можно характеризовать ненадежность к-го параметра.
Известны затраты gк на контроль каждого параметра. При этом предполагается, что затраты g(w) на контроль любой совокупности w параметров слагаются из суммы затрат на контроль каждого параметра из этой совокупности.
Требуется из всех совокупностей (наборов) w, у которых g(w)<Gs -допустимых планов, (где Gs - s-oe ограничение на проведение контроля) выбрать ту совокупность, при которой вероятность безотказной работы устройства после проведения контроля (диагностики) была бы наибольшей.
Решение.
Обозначим: рк - вероятность безотказной работы тех элементов, у которых контролируется к-й параметр (qк = l – pк). Вероятность безотказной работы устройства перед контролем
 ,(4.3.1)
,(4.3.1)
при
 . (4.3.2)
. (4.3.2)
Взаимосвязь параметров и элементов задается матрицей вида
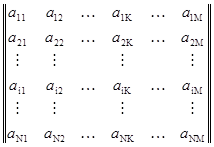
элементы которой определяются из условия
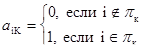 ,(4.3.4)
,(4.3.4)
где i - номер элемента;
к - номер параметра.
При этом параметры нумеруются так, чтобы соответствующие им затраты составляли неубывающий ряд
 .
.
(Впоследствии предпочтительно начинать выбор параметров слева).
При продолжительном результате контроля к-го параметра, вероятность безотказной работы всех элементов, от которых зависит к-й параметр, принимается равной единице. В этом случае вероятность безотказной работы всей системы определится выражением
 ,
,
где
 .(5.3.5)
.(5.3.5)
При этом вероятность безотказной работы системы возрастет на величину
 .
.
Предполагается, что затраты qк и ограничение Gs таковы, что сумма любых двух значений затрат больше Gs. Тогда для контроля, очевидно, надлежит выбирать лишь один параметр. Этим параметром будет тот, у которого сумма Sк будет наибольшей, а следовательно и приращение ΔР(к) также наибольшее. Если таких параметров несколько, то из них надо выбрать тот, у которого произведение (1 – Sк)qк - наименьшее и, следовательно, приращение вероятности, приходящееся на единицу затрат – наибольшее
 .
.
Если систему проконтролировать некоторой совокупностью w приборов (πw) и затраты при этом g(w) < Gs, то вероятность безотказной работы системы примет значение
 ,
,
где
 .(4.3.5)
.(4.3.5)
При этом общий множитель pi (или общее слагаемое qi) берется лишь один раз. Вероятность безотказной работы системы увеличится при этом на величину
 .
.
Если при фиксированном числе параметров все наборы w таковы, что g(w) + g1 > Gs и  , то из всех наборов оптимальным будет тот, у которого сумма Sw - наибольшая, а, следовательно, и приращение вероятности будет наибольшим. Если окажется несколько наборов с одинаковой наибольшей суммой Sw , то оптимальным из них будет тот, у которого величина
, то из всех наборов оптимальным будет тот, у которого сумма Sw - наибольшая, а, следовательно, и приращение вероятности будет наибольшим. Если окажется несколько наборов с одинаковой наибольшей суммой Sw , то оптимальным из них будет тот, у которого величина
наибольшая. Таковым будет набор, у которого произведение g(w)(1 - Sw) - наименьшее.
Алгоритм определения рационального набора контролируемых параметров реализуется в следующей последовательности:
1-й шаг. Параметры, у которых gк > Gs не рассматриваются. Для оставшихся параметров вычисляются Sк и находится наибольшая из них Sк(0) . Если таких параметров несколько, то из них выбирается тот, у которого Rк = gк(1 – Sк) - наименьшее. Обозначим этот параметр π10.
2-й шаг. Исключаются из дальнейшего рассмотрения все параметры, у которых gк = Gs (кроме π10, если g10 = Gs). Из оставшихся параметров формируются наборы по два параметра: (π1,π2)(π1,π3) … (πм-1,πм).Все пары (πк,π1), у которых g2 = gк + g1 > Gs не рассматриваются. Вычисляются

и находится наибольшая из них S к1(0). Если таких пар несколько, то из них выбирается та, у которой Rк1 = (gк+g1)(l – Sк1) - наименьшее. Обозначим эту пару π20.
m-й шаг. Процесс продолжается до сочетаний по m≤М параметров, если еще gw→M < Gs. Из полученных наивыгоднейших наборов π10, π20, …, πm0 выбирается тот, у которого наименьшее
 .
.
Соответствующий набор параметров есть решение поставленной задачи. При этом вероятность безотказной работы системы после проведения диагностики достигает наибольшего значения
 .
.
Точное решение задачи по предлагаемому алгоритму при больших М и N (несколько десятков) становится весьма громоздким. Можно использовать приближенные методы, которые позволяют получить вполне приемлемую для инженерной практики точность. К ним относятся:
А. Метод выбора рационального набора по числу максимально допустимых в наборе элементов.
Определяется среднее значение затрат на контроль одного параметра
 .
.
Предполагается, что затраты gк = gc = const и рациональный набор контролируемых параметров находится среди наборов с максимально допустимым числом параметров. За максимально допустимое число принимается
 .
.
Затем рассматриваются все наборы по n параметров, у которых  и из них выбирается оптимальный πn0 по алгоритму, изложенному ранее.
и из них выбирается оптимальный πn0 по алгоритму, изложенному ранее.
Применение этого приближенного метода эффективно при близких значениях затрат на контроль параметров.
Б. Метод приближения к рациональному набору по наборам с наибольшим приращением вероятности, приходящейся на единицу затрат (Метод наискорейшего спуска).
Предполагается, что из всех сочетаний по два наилучшим является сочетание из таких параметров πк10 и πк20, что значение V(к1 0) — наибольшее из всех V(к) и V(к1 0 к2 0) - наибольшее из всех V(кl к2). Из всех сочетаний по три параметра наилучшим является сочетание πк10 πк20 πк30 у которого значение V(к1 0 к2 0 к3 0) наибольшее. Таким образом, за оптимальный набор принимается набор πк10 πк20…πкn0. При этом присоединение к этому набору любого из оставшихся приборов не удовлетворяет условию ограничения на затраты
 и
и  .
.
В этом методе получается наименьшее число переборов. Его применение наиболее эффективно при резком отличии параметров друг от друга.
В. Комбинированный метод, в котором применены предыдущие приближенные методы и основные идеи метода ветвей и границ. По методу А определяется базовый набор wБ0, состоящий их n параметров при g(wБ0) < Gs. В наборах  и
и  отыскиваются такие параметры, чтобы
отыскиваются такие параметры, чтобы
 . (4.3.6)
. (4.3.6)
Комбинированный метод, очевидно, самый эффективный из рассмотренных и позволяет наиболее быстро подойти к решению задачи при
 (4.3.7)
(4.3.7)
Такие операции проводятся до тех пор пока находятся параметры, удовлетворяющие условиям (4.3.6 и 7). При этом оптимальным набором w0 из {wБ0, wБ1, wБ2, ..., wБm} считается тот, у которого
 .
.
Следует отметить, что число шагов решения при использовании алгоритма Р.Р. Убара, реализованного с помощью метода ветвей и границ [28]. (при учете допустимости и перспективности) несколько больше, чем при методе В, и логика алгоритма и элементарные вычисления сложнее приведенных выше.
Приведем характеристики числа переборов вариантов без учета допустимости и перспективности планов (табл.4.3.1).
Следует отметить, что с ростом М и n различие в числе переборов для этих методов быстро возрастает. При учете допустимости и перспективности наборов число переборов в трех последних методах резко падает (метод А грубее остальных и может применяться только при сильных ограничениях).
| Таблица 4.3.1 | ||
| Метод (алгоритм) | Максимальное число переборов | n=5 М=7 |
| Полный перебор | 
| 127 |
| А | 
| 21 |
| Б | 
| 25 |
| Алгоритм Р.Р.Убара | 
| 70 |
По простоте алгоритма и по элементарности вычислений, а также по быстроте решения наиболее предпочтительным является метод Б. Используя понятие веса (важности) параметра можно заменить в матрице (4.3.3) величину аiк на hiк.
При этом
 ,
,
a hiк показывает (относительно) как сильно влияет i-ый элемент (точнее параметры элемента) на к-ый параметр. Такая замена особенно эффективна при преобладающем количестве параметрических отказов. Заметим, что не меняя сущности метода, можно заменить величину qi на λiτbi или на τbi/τсрi, (где λi –интенсивность отказов i-гo элемента; τсрi - среднее время восстановления i-гo элемента). При этом в выражении (4.3.1) Р(0) будет иметь смысл коэффициента готовности. Проиллюстрируем методы на примерах.
Примеры: Объект контроля задан матрицей вида (4.3.3)

элементы которой определяются из условия (4.3.4).
Исходные данные приведены в табл.4.3.2. ограничение Gy=7.
| Таблица 4.3.2 | ||||||
| № | qi x 103 | π1 | π2 | π3 | π4 | π5 |
| затраты на контроль | ||||||
| 2 | 2 | 2 | 3 | 3 | ||
| 1 | 3 | 3 | ||||
| 2 | 5 | 5 | 5 | 5 | ||
| 3 | 4 | 4 | 4 | |||
| 4 | 4 | 5 | ||||
| 5 | 4 | 4 | ||||
| Sк x l03 | 20 | 4 | 3 | 9 | 9 | 9 |
| 1 - Sк | 0,980 | 0,996 | 0,997 | 0,991 | 0,991 | 0,991 |
| Rк = gк(l - Sк) | - | - | 1,882 | - | - | |
Пример 1. Из табл.4.3.2 видно, что предпочтительным для контроля является параметр π3, то есть
 .
.
Сочетания по два параметра для определения π2º представлены в табл. 4.3.3. Из нее следует, что предпочтительным для контроля является сочетание параметров π3π4 = π2º;
 .
.
| Таблица 4.3.3 | |||||||||||
| № | qi x 103 | 12 | 13 | 14 | 15 | 23 | 24 | 25 | 34 | 35 | 45 |
| затраты на контроль g(2) | |||||||||||
| 4 | 4 | 5 | 5 | 4 | 5 | 5 | 5 | 5 | 6 | ||
| 1 | 3 | 3 | 3 | 3 | |||||||
| 2 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | |
| 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |||
| 4 | 4 | 4 | 4 | ||||||||
| 5 | 4 | 4 | 4 | ||||||||
| Sк1 x l03 | 7 | 9 | 9 | 9 | 12 | 8 | 12 | 13 | 9 | 13 | |
| (1 - Sкl) x 103 | 993 | 991 | 991 | 991 | 988 | 992 | 988 | 987 | 991 | 987 | |
| (1 – Sк1) x g(2) | 3,952 | ||||||||||
Сочетания по три параметра для определения π3º представлены в табл.4.3.4
| Таблица 4.3.4 | |||||||||||
| № | qi x 103 | 123 | 124 | 125 | 134 | 135 | 145 | 234 | 235 | 245 | 345 |
| затраты на контроль g(3) | |||||||||||
| 6 | 7 | 7 | 7 | 7 | 8 | 7 | 7 | 8 | 8 | ||
| 1 | 3 | 3 | 3 | 3 | 5 | 3 | 3 | ||||
| 2 | 5 | 5 | 5 | 5 | 5 | 4 | 5 | 5 | |||
| 3 | 4 | 4 | 4 | 4 | 4 | 4 | |||||
| 4 | 4 | 4 | 4 | 4 | 4 | ||||||
| 5 | 4 | 4 | 4 | 4 | |||||||
| S3 x 103 | 16 | 16 | 12 | 17 | 9 | - | 16 | 16 | - | - | |
| (1 - S3) х 103 | 984 | 984 | 988 | 983 | 991 | 984 | 984 | ||||
Примечание: наборы 145, 245 и 345 не рассматриваются, так как для них g(3) = 8>7. Из табл.4.3.4 получаем рациональный набор π3º=π1π3π4.
При этом
Любое сочетание по 4 прибора дает g(w)>7.
Сравнивая Р(3), Р(34) и P(134), получаем оптимальный набор (π1π3π4).
Пример 2. Для тех же числовых данных решим задачу 1-ым приближенным методом. В нашем случае
Составляется табл.4.3.4 и из нее находится π3º=π1π3π4.
Пример 3. Решаем 2-м приближенным методом. Из табл.4.3.2 имеем πк1º=π3. После этого объем табл. 4.3.3 сократится, то есть в ней рассматриваются лишь сочетания с параметром π3[(31), (32), (34) и (35)].
Минимум произведения (l - Sк1)g(2) дает максимум V(к1). Таким образом, как это следует из табл. 4.3.3, сочетание πк1º πк2º= π3π2.
По этим же причинам уменьшается и объем табл. 4.3.4, так как в ней рассматриваются лишь сочетания с параметрами π3 и π2[(231), (234) и (235)].
Наименьшее произведение (1 - S3) g(3) соответствует сочетанию π2π3π1 Для этого сочетания величина V(к1 0 к2 0 к3 0) – наибольшая.
Приближенно определенный набор незначительно отличается от ранее найденного и при затратах g1 + g2 + g3 = 6 < 7, вероятность безотказной работы Р(123) = 0,996.
|
из
5.00
|
Обсуждение в статье: Выбор контролируемых параметров по максимальному значению вероятности безотказной работы после проведения диагностики |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы