 |
Главная |


Трехмассовая модель подвески автомобиля. Вывод уравнений движения методом Лагранжа в обобщенных координатах
|
из
5.00
|
Применение уравнений Лагранжа для вывода уравнений движения трехмассовой динамической модели с линейным перемещением масс
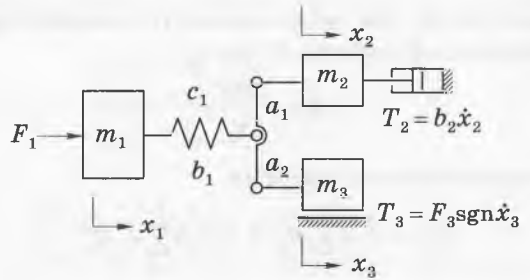
Рисунок – Трехмассовая динамическая модель с линейным перемещением масс
Кинетическая, потенциальная энергия и функция рассеивания соответственно равны



В соответствии с уравнениями Лагранжа необходимо продифференцировать выражения для энергий







После подстановки результатов дифференцирования в уравнения Лагранжа получим систему дифференциальных уравнений:



где




Переход от абсолютных к относительным обобщенным координатам на примере трехмассовой динамической модели с угловым перемещением масс

Рисунок – Трехмассовая динамическая модель с угловым перемещением масс
Система уравнений относительно углов поворота масс

Деформации упругих звеньев и их первые и вторые производные соответственно равны

Для перехода к относительны м координатам разделим каждое из уравнений системы на свой момент инерции Jl, J2 или J3 и последовательно вычтем из первого уравнения второе и из второго третье. В результате получим


После подстановки в систему значений моментов M1 и М2, равных

получим систему уравнений, в которых обобщенными координатам и являются деформации упругих звеньев:


Поскольку деформации пропорциональны упругим моментам, после умножения первого уравнения системы на c1, а второго – на с2, получим уравнения, в которых обобщенными координатами являются крутящие моменты в упругих звеньях:


При отсутствии трения (b1 = b2 = 0) M1= Мс1 и М2= Мс2. В этом случае уравнения примут вид

Трехмассовая модель подвески автомобиля. Вывод уравнений движения методом Лагранжа в обобщенных координатах

Рисунок – Трехмассовая динамическая модель подвески автомобиля
Для вывода уравнений движения используем уравнения Лагранжа второго рода в виде
 ,
,
где  ,
,  – кинетическая и потенциальная энергия системы;
– кинетическая и потенциальная энергия системы;
 – функция рассеивания;
– функция рассеивания;
 – i-я обобщенная координата.
– i-я обобщенная координата.
Кинетическая энергия системы

Приняв за начало координат положение статического равновесия, получим для потенциальной энергии
 ,
,
где  ,
,  – деформация упругих элементов подвески переднего и заднего мостов:
– деформация упругих элементов подвески переднего и заднего мостов:
 ;
;  ;
;
 ,
,  – радиальная деформация шин переднего и заднего мостов:
– радиальная деформация шин переднего и заднего мостов:
 ;
;  .
.
Перемещения  и
и  подрессоренной массы
подрессоренной массы  над балками переднего и заднего мостов:
над балками переднего и заднего мостов:
 ;
;  .
.
Следовательно, выражение для потенциальной энергии примет вид:


Энергия, рассеиваемая в системе,
 ,
,
или


Дифференцируя равенства по принятым обобщенным координатам  ,
,  ,
,  и
и  , получим:
, получим:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
После подстановки полученных производных в уравнения Лагранжа, число которых равно числу обобщенных координат, и преобразований получим искомую систему уравнений движения:
 ;
;
 ;
;
 ;
;
 ,
,
где
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
|
из
5.00
|
Обсуждение в статье: Трехмассовая модель подвески автомобиля. Вывод уравнений движения методом Лагранжа в обобщенных координатах |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы