 |
Главная |


Кинематический анализ расчетных схем
|
из
5.00
|
Расчетная схема всякого строительного сооружения должна быть геометрически неизменяемой.
Геометрически неизменяемой называют такую стержневую систему, форма которой может быть изменена Рис.1.5
только в результате упругих деформаций ее элементов.
Необходимым условием геометрической неизменяемости системы служит равенство нулю числа степеней ее свободы.
Степенью свободы называют число независимых геометрических параметров, определяющих положение системы на плоскости( если речь идет о плоской расчетной схеме).
Простейшая “система” – точка на плоскости имеет две степени свободы: два числа , x и y, определяют положение точки М на плоскости (рис.1.6а)

|
Рис.1.6
Стержень(жесткий диск) имеет на плоскости три степени свободы: два числа, x и y определяют положение центра тяжести стержня на плоскости и угол  фиксирует наклон стержня к осям координат (рис1.6b)
фиксирует наклон стержня к осям координат (рис1.6b)
На рис.1.c показаны два диска, соединенные шарниром. Шарнир, соединяющий два диска называется простым. Такая система имеет четыре степени свободы: три числа определяют положение системы как жесткого образования и четвертое число, угол  , фиксирует ”особенность” этой жесткой системы. Если бы стержни не были бы соединены шарниром, то степень их свободы равнялась бы шести. Таким образом, простой шарнир отнимает у системы две степени свободы
, фиксирует ”особенность” этой жесткой системы. Если бы стержни не были бы соединены шарниром, то степень их свободы равнялась бы шести. Таким образом, простой шарнир отнимает у системы две степени свободы
Шарнир, соединяющий n стержней эквивалентен n-1 простому шарниру. Например, шарнир, соединяющий n = 3 стержня (рис.6d) эквивалентен двум (3 – 1 ) простым шарнирам. У такой “связки” число степеней свободы системы равно пяти: три числа, характеризующие положение системы как жесткого тела и два угла и  . Система “россыпью” имеет девять степеней свободы, а шарнир, соединяющий три стержня, отнимает у нее четыре степени, как два простых шарнира. Шарнир, соединяющий n стержней называется сложным и эквивалентен ( по числу отнимаемых связей, n- 1 простому шарниру.
. Система “россыпью” имеет девять степеней свободы, а шарнир, соединяющий три стержня, отнимает у нее четыре степени, как два простых шарнира. Шарнир, соединяющий n стержней называется сложным и эквивалентен ( по числу отнимаемых связей, n- 1 простому шарниру.
Приведенные простейшие соображения позволяют записать формулу для определения числа степеней свободы плоской шарнирно- стержневой системы
W = 3D – 2 Ш – C0 (1.2)
Здесь D – число дисков (стержней), Ш – число простых шарниров, С0 – число опорных стержней
Проверка по. формуле (1) необходима, но недостаточна для заключения о геометрической неизменяемости системы, так как при неправильной расстановке стержней можно получить механизм (изменяемую систему) и при W =0.
Ферма на рис.1.7а. геометрически неизменяема, имеет 9 дисков (стержней), два простых шарнира А и B, три двукратных (1,2,3) и один четырехкратный (4), три опорных стержня.

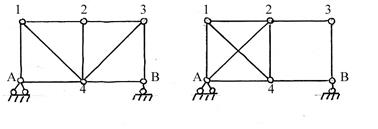 Переставим один раскос так, как показано на рис. 7b. Подсчет числа степеней свободы дает;
Переставим один раскос так, как показано на рис. 7b. Подсчет числа степеней свободы дает;
Рис.1.7
Однако нетрудно заметить, что новая система изменяема (шарнирный четырехугольник 2-3-B-4 – изменяемая фигура) и возможны ее перемещения без нагрузки.
 Рис.1.8
Рис.1.8
|
Поэтому кроме проверки по формуле (1.2) условия W=0 необходимо провести и структурный анализ системы.
Основой этого анализа является житейское представление о неизменяемости шарнирного треугольника. Три стержня, соединенные шарнирами при условии, что шарниры не лежат на одной прямой (рис.1.8) образуют геометрически неизменяемую систему.
 Полезно знать правила соединения двух дисков в жесткую, геометрически неизменяемую систему. Рис.1.8
Полезно знать правила соединения двух дисков в жесткую, геометрически неизменяемую систему. Рис.1.8
Два диска образуют геометрически неизменяемую систему,
если
1) соединены тремя непараллельными и
непересекающимися стержнями (рис.1.9)
2)соединены шарниром и стержнем не Рис.1.9
лежащими на одной прямой (рис.1.10)
Оба эти способа можно свести к правилу треугольника,
если ввести понятие условного или фиктивного шарнира, на пересечении двух соединяющих стержней

|
Сформулированные правила позволяют сделать следующий вывод: если к геометрически неизменяемой системе каждый новый узел присоединяется при помощи двух стержней, не лежащих на одной прямой, то такая система тоже будет геометрически неизменяемой . Рис.1.10

|
Невыполнение указанных правил может привести к большим неприятностям.
Пусть, например, три стержня, соединяющих диски,
пересекаются в одной точке (рис.1.11).
Такая система называется мгновенно изменяемой,
так как возможно бесконечно, так как возможно бесконечно
малое перемещение диска I относительно диска II из –за наличия мгновенного центра вращения О Мгновенно изменяемые системы характерны тем, что в них могут возникать бесконечно малые перемещения без деформации элементов. Рис 1.11
На практике нужно избегать не только мгновенно изменяемых систем, но и систем близких к ним. Рассмотрим примеры.
 Пусть два диска соединены тремя стержнями, два из которых пересекаются, а продолжение третьего проходит вблизи точки пересечения (рис.1.12). Рассечем соединяющие стержни и рассмотрим равновесие верхней части.
Пусть два диска соединены тремя стержнями, два из которых пересекаются, а продолжение третьего проходит вблизи точки пересечения (рис.1.12). Рассечем соединяющие стержни и рассмотрим равновесие верхней части.
Из уравнения равновесия ∑МО =0, получаем
S3 ∆ - Fe=0, S3 = Fe/∆ .
Если ∆ стремится к нулю, то усилие N1 стремится к бесконечности.
Пусть в системе на рис.1.13 два стержня лишь немного отклонены от прямой АВ. Если в узле С приложена Рис.1.12
вертикальная сила, то усилия в стержнях АС и ВС определяются из уравнения равновесия узла С

|
S1 = S2 =F/2sinα.
При малом угле α правая часть становиться большой, а при угле, стремящемся к нулю, усилия стремятся к бесконечности.
Итак, анализ геометрической неизменяемости расчетной схемы проводится в два этапа:
1)Определяют, равна ли нулю степень свободы системы по формуле (1)?
2)Проводят структурный анализ системы.
Рис.1.13
Вопросы для самоконтроля
1.Что понимают под расчетной схемой сооружения? Какими соображениями руководствуются при идеализации сооружения?
2. Какие расчетные схемы сооружений изучают в строительной механике стержневых систем?
3.Как идеализируются опоры сооружений?
4.Какая модель деформируемого тела применяется в классической строительной механике и к каким материалам она неприменима?
5.Какая система называется геометрически неизменяемой?
6.Что называется степенью свободы плоской стержневой системы?
7. Что такое простой шарнир и скольким кинематическим связям он эквивалентен?
8.Что такое сложный шарнир?
9. В чем заключается кинематический анализ расчетной схемы сооружения?
10.Какое необходимое, но недостаточное условие является признаком геометрической неизменяемости системы?
11. В чем состоит анализ геометрической структуры системы?
12. Перечислите способы образования геометрически неизменяемых стержневых систем?
13.Какие системы называют мгновенно-изменяемыми и почему?
14. Почему мгновенно-изменяемые системы не применяют в строительной практике?
Глава 2
|
из
5.00
|
Обсуждение в статье: Кинематический анализ расчетных схем |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы