 |
Главная |


Робототехнические средства
|
из
5.00
|
Анализ ЧС и задач, которые необходимо решать при их ликвидации показывает, что наиболее сложными и опасными являются ситуации, которые обусловлены авариями и катастрофами на радиационно и химически опасных объектах, пожаро-взрывоопасных объектах, при проведении пиротехнических и подводно-технических работ.
Изучение поражающих факторов аварий, катастроф, а также опыт ликвидации последствий аварий на Чернобыльской АЭС, на исследовательском объекте в г. Сарове (Арзамас-16) и обезвреживание источника радиоактивного излучения в Чеченской Республике свидетельствует о том, что в большинстве случаев требуется применение роботизированной дистанционно управляемой техники.
Робототехническое средство (РТС) – это устройство, которое выполняет функциональные действия, предписанные виды работ или операции без непосредственного участия человека.
РТС используемые для ликвидации ЧС классифицируются:
1) по среде применения: наземное; воздушное; надводное; подводное.
2) по целям применения:
· для ликвидации радиационных аварий;
· для ликвидации химических аварий;
· для ликвидации и обезвреживания взрывоопасных предметов;
· для аварийных работ в зоне пожаров.
3) по выполняемым операциям: разведывательные; разведывательно-технологические; технолого-разведывательные; технологические.
4) по массе:
· сверхлегкие (до 100 кг);
· легкие (до 1 000 кг);
· средние (до 20 000 кг);
· тяжелые (до 50 000 кг);
· сверхтяжелые (более 50 000 кг).
Для разработки, производства и поставки на снабжение в МЧС России комплексов РТС ВНИИ ГОЧС совместно с МГТУ им. Н.Э. Баумана и 294 ЦСООР была разработана «Программа создания и внедрения робототехнических средств для решения задач МЧС России», которая утверждена и введена в действие приказом МЧС России от 16.07.97 г. № 343.
Целью Программы является снижение риска для жизни спасателей и повышение эффективности аварийных, неотложно-восстановительных и других специальных работ, путем создания и внедрения в МЧС России РТС для выполнения работ в ЧС, связанных с радиоактивным и химическим загрязнением, бактериологическим заражением в условиях, опасных для жизни и здоровья спасателей, а также пиротехнических работ, в т.ч. в районах, бывших боевых действий.
Для достижения поставленной цели необходимо решить следующие задачи:
· организовать разработку, производство и закупку РТС и оснащение сил МЧС России современными образцами РТС;
· создать специализированные подразделения МЧС России для решения задач с применением РТС и организовать обучение личного состава;
· разработать и внедрить в системе МЧС России и РСЧС руководящие и нормативные документы по применению РТС при ликвидации ЧС;
· создать учебно-материальную базу для подготовки специалистов по обслуживанию и применению РТС.
В рамках реализации этой программы в 294 ЦСООР создано специализированное подразделение, на оснащении которого находятся РТС, созданные и закупленные в ходе ее выполнения.
Мобильный робототехнический комплекс МРК-25 (рис. 5.6.16)принят на снабжение приказом МЧС России от 16.10.2000 г. № 51. Изготовитель: МГТУ им. Н.Э. Баумана, г. Москва.
Комплекс предназначен для проведения пиротехнических работ, включая поиск, обезвреживание и транспортировку взрывоопасных предметов и боеприпасов, ведение разведки внутри помещений и на местности в ЧС.

Рис. 5.6.16Мобильный робототехнический комплекс МРК-25
В состав комплекса входят:
· гусеничное шасси с изменяемой геометрией и электромеханической трансмиссией;
· пятистепенный электромеханический манипулятор;
· система теленаблюдения;
· система подсветки;
· передвижной пульт управления;
· комплект сменного технологического оборудования.
Технические характеристики МРК-25:
| масса, кг | – 180,0; |
| скорость передвижения, км/ч | – до 2,0; |
| радиус управления: по кабелю, м по радио, м | – 100,0; – 500,0; |
| количество видеокамер, шт | – 3 ч/б; |
| грузоподъемность манипулятора, кг номинальная/предельная | – 15,0/25,0; |
| время непрерывной работы, ч | – 2; |
| габаритные размеры (L´B´H), мм | – 950´650´900. |
Мобильный робототехнический комплекс МРК-27Х. Изготовитель: МГТУ им. Н.Э. Баумана, г. Москва.
Комплекс предназначен для проведения аварийно-спасательных и специальных работ в условиях химического загрязнения, визуального осмотра объекта, инструментальной приборной разведки и определение уровней загрязнения воздуха, отбора проб, в т.ч. грунта и воды, выполнение технологических операций по локализации источника загрязнения.
В состав комплекса входят:
· гусеничное шасси с изменяемой геометрией и электромеханической трансмиссией;
· пятистепенный электромеханический манипулятор;
· система радиоуправления;
· система теленаблюдения;
· система химической разведки;
· система подсветки;
· передвижной пульт управления;
· комплект сменного технологического оборудования.
Технические характеристики МРК-27Х:
| масса, кг | – 190,0; |
| скорость передвижения, км/ч | – 2,5; |
| радиус действия, м по радиоканалу | – 200,0; |
| количество видеокамер, шт. | –3 ч/б,+ (цв.); |
| грузоподъемность манипулятора, кг номинальная/предельная | – 25,0/45,0; |
| время непрерывной работы, ч | – 4; |
| габаритные размеры (L´B´H), мм | – 1150´710´650. |
Электрогидравлическая установка с дистанционным управлением BROKK-330(рис. 5.6.17).Изготовитель: HOLMED Sistems, Швеция.
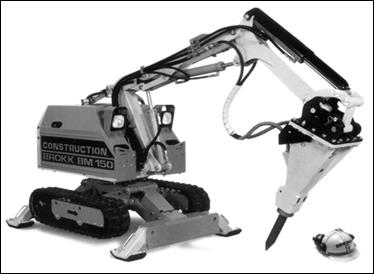
Рис.5.6.17Мобильный робототехнический комплекс BROKK-330
Установка предназначена для выполнения аварийных и ремонтно-восстановительных работ в условиях опасных для жизни спасателей, разборки завалов, укрепления при обнаружении неустойчивых конструкций; перемещения и нагрузки элементов завалов; сбора, контейнирования и транспортировки радиоактивных отходов.
В состав комплекса входят:
· самоходная база с колесными шестернями и стальными гусеницами;
· гидравлическая поворотная платформа с углом поворота 360о;
· электрогидравлическая приводная станция;
· пульт дистанционного управления;
· телекамеры на стойке и на «BROKK-330»;
· манипулятор со сменным рабочим оборудованием.
Технические характеристики BROKK-330:
| масса (без навесного оборудования), кг | – 4100; |
| скорость передвижения, км/ч | – 2,0; |
| максимальный радиус захвата, м | – 816,0; |
| рабочий радиус (в зависимости от навесного оборудования), м | – 0¸6,5; |
| максимальный диаметр перекусываемого прута, мм | – 80,0; |
| габаритные размеры (L´B´H), мм | – 3556´2430´1792. |
Электрогидравлическая установка с дистанционным управлением «BROKK-MiniCut».Изготовитель: HOLMED Sistems, Швеция.
Установка предназначена для выполнения аварийных и ремонтно-восстановительных работ в условиях опасных для жизни спасателей; проделывания проходов, проездов в труднодоступных местах.
В состав установки входят:
· самоходная база с колесными шестернями и резиновыми гусеницами;
· гидравлическая поворотная платформа с углом поворота 2450;
· электрогидравлическая приводная станция;
· пульт дистанционного управления;
· манипулятор со сменным рабочим оборудованием.
Технические характеристики «BROKK-MiniCut»:
| масса (без навесного оборудования), кг | – 384,0; |
| скорость передвижения, км/ч | – 2,5; |
| максимальный радиус захвата, мм | – 300,0; |
| рабочий радиус (в зависимости от навесного оборудования), м | – 0¸2,4; |
| габаритные размеры (L´B´H), мм | – 1195´1040´940. |
Мобильный робототехнический комплекс MF-4(рис. 5.6.18)Изготовитель «Telerob», Германия.

Рис. 5.6.18Мобильный робототехнический комплекс МF-4
Комплекс предназначен для поиска и обезвреживания нестандартных взрывоопасных предметов, инспектирования и видеонаблюдения опасных участков территорий и промышленных объектов.
В состав комплекса входят:
· гусеничное шасси;
· шестистепенный электромеханический манипулятор;
· система радиоуправления;
· система теленаблюдения;
· система подсветки;
· передвижной пульт управления;
· комплект сменного технологического оборудования.
Технические характеристики MF-4:
| масса, кг | – 280,0; |
| скорость передвижения, км/ч | – 1,5; |
| радиус управления: по кабелю, м | – 100,0; |
| по радио, м | – 1 000,0; |
| количество видеокамер, шт. | – 3 цв.; |
| грузоподъемность манипулятора (max), кг | – 30,0; |
| габаритные размеры (L´B´H), мм | – 1300´670´920. |
Мобильный роботехнический комплекс Hobo.Изготовитель: «Hobo», Ирландия.
Комплекс предназначен для поиска и обезвреживания нестандартных взрывоопасных предметов, инспектирования и видеонаблюдения опасных участков территорий и промышленных объектов.
В состав комплекса входят:
· колесное шасси 6´6;
· шестестепенный гидравлический манипулятор;
· система радиоуправления;
· система теленаблюдения;
· система подсветки;
· передвижной пульт управления;
· комплект сменного технологического оборудования.
Технические характеристики РТК «Hobo»:
| масса, кг | – 228,0; |
| скорость передвижения, км/ч | – 4,5; |
| радиус управления: | |
| по радио, м | – 1 000,0; |
| по кабелю, м | – 150; |
| количество видеокамер, шт. | – 3 цв.; |
| габаритные размеры (L´B´H), мм | – 1130´840´520. |
Робототехнический комплекс «Щит». Разработчики МГТУ им. Н.Э.Баумана, ОАО «ТЭЗ», г. Тверь, ОАО «СКБМ», г. Курган, ООО «Техгидравлика». Принятие на снабжение в МЧС России планируется в 2002 г.
Комплекс предназначен для проведения аварийно-восстановительных работ, связанных с выполнением разведывательных, дорожных, земляных и разградительных работ в условиях радиоактивного и химического загрязнения местности, откопкой, извлечением и обезвреживанием заглубленных невзорвавшихся боеприпасов, обрушения конструкций зданий, грозящих обвалом.
В состав комплекса входят:
· универсальное робототехническое средство РТС-У;
· специальное робототехническое средство РТС-С;
· машина управления и доставки оборудования ППУ-РТС;
· машина технического обслуживания и ремонта МТОР-РТС;
· средства доставки РТС (СД-РТС), 2 тягача и 2 тпайлера;
· вспомогательный транспортный автомобиль;
· сменное оборудование.
При выполнении технологических операций и разведки должно обеспечиваться управление РТС-У и РТС-С с пульта управления по кабелю на расстоянии до 400 м и радиоуправление - на расстоянии не более 2000 м (в условиях прямой видимости).
РТК должен обеспечивать работу в светлое и темное время суток.
Длительность непрерывной работы – не менее 8 ч.
Длительность автономной работы – не менее 2 суток.
Рабочее навесное оборудование: бульдозерный отвал, манипулятор со сменным инструментом, землеройный ковш (обратная лопата), копающий грейфер, захватное устройство со сменными губками, гидромолот и гидроножницы и лебедка с тянущим усилием 25 тонн.
В настоящее время проводятся приемочные испытания составных частей комплекса.
Технические характеристики РТК «Щит»:
| масса каждой машины РТК, кг | – не более 20000; |
| скорость движения своим ходом, км/ч | – не более 30; |
| запас хода по топливу, км | – не менее 400; |
| радиус управления: | |
| по радио, м | – 400; |
| по кабелю, м | – 2000; |
| масса обезвреживающихся боеприпасов, кг | – до 500. |
Телеуправляемый манипуляционный подводный аппарат «АКВА-ЧС». Разработчик МГТУ им. Н.Э. Баумана. Принятие на снабжение в МЧС России планируется в 2002 г.
Аппарат предназначен для обеспечения телевизионного поиска и обслуживания донных объектов и их внутренних полостей через входные проемы размером не менее 1,2 м, проведения разведки, отбора проб грунта и выполнения технологических операций по резке металлических профилей и тросов.
В состав комплекса входят:
· судовая часть с системой управления аппаратом, размещенные в контейнере;
· забортная часть, включающая манипуляционный аппарат и грузонесущий кабель;
· телевизионная система;
· система телеуправления и телеметрии;
· система управления движением аппарата;
· технологическое оборудование.
Технические характеристики «АКВА-ЧС»:
| масса аппарата с пультом управления, кг | – не более 750; |
| скорость перемещения, м/с: | |
| продольная | – не менее 1,5; |
| вертикальная | – не менее 1,0; |
| лаговая | – не менее 0,5; |
| (3-х фазный переменный ток: U = 380 В, электропитание f = 50 Гц), потребляемая мощность, кВт | – 15; |
| глубина погружения, м | – не более 500. |
Классическим примером успешного применения мобильных роботов явилась ликвидация радиационной аварии, имевшей место в г. Сарове (Арзамас-16) Нижегородской области в июне-июле 1997 г.
При проведении работ на экспериментальной установке при монтаже специальной сборки вследствие нарушения регламента работ создались условия для возникновения самоподдерживающейся цепной ядерной реакции.
Аварийный объект превратился в стационарный излучатель, мощность которого составила несколько тысяч рад/с. Уровень эквивалентной дозы ионизирующих излучений составлял в аварийном помещении более 2000 бэр/ч.
В соответствии с программой работ по ликвидации аварии необходимо было провести следующие первоочередные работы:
· убрать контейнеры с радиоактивным источником из аварийного помещения на безопасное расстояние в другое помещение;
· перевести радиоактивный источник в состояние ниже критического для прекращения действия потока излучения.
С целью снижения риска облучения участников ликвидации аварии работы проводились с помощью мобильных РТС:
· МРК-25 (разработка ОКБ СР МГТУ им. Н.Э. Баумана);
· МРК «Ноbо» и МРК «Rascal» (производство Ирландия);
· МРК MF-4 (производство «Теlerоb», Германия).
Подготовительные работы перед ликвидацией аварии включали:
· изучение исполнителями места работ по схеме, фотографиям, материалам видеосъемок;
· защита электронных блоков и телекамер мобильных роботов MF-4, МРК-25 и «Hobo» радиационно стойкими материалами с целью обеспечения их работоспособности более длительное время;
· размещение вспомогательных телекамер с использованием МРК «Hobo», «RASCAL» и MF-4 в аварийном и смежных помещениях с целью повышения надежности управления роботами;
· планирование и практическая отработка тактики движения робота МРК-25 с целью сокращения пребывания МРК-25 в зоне действия нейтронного потока.
Практически операции по ликвидации радиационной аварии были проведены в следующем порядке:
1. Эвакуация пяти контейнеров с радиоактивным источником из аварийного помещения с помощью МРК-25 с предварительной опытной отработкой операции.
2. Отработка операции по переводу аварийного объекта («сборки») в подкритическое состояние с помощью мобильного робота MF-4.
3. Ликвидация нештатной ситуации, возникшей при выполнении операции по переводу аварийного объекта в подкритическое состояние и эвакуация робота MF-4 с помощью МРК-25.
4. Анализ, разработка и экспериментальная отработка вариантов по переводу «сборки» в подкритическое состояние и выполнение ее вакуумным захватом с помощью МРК-25.
5. Вывод МРК-25 из аварийного помещения, дозиметрический контроль и дезактивация МРК-25 и MF-4.
Роль и эффект применения мобильных роботов в ликвидации данной аварии, которая могла иметь катастрофические последствия, вполне очевидны. Роботы явились единственно возможным средством для погашения столь мощного радиоактивного источника.
В целом, по результатам рассмотренного опыта применения робототехнических средств при ликвидации радиационных аварий можно сделать следующие выводы:
Мобильные работы являются единственно возможными средствами для проведения работ в зонах опасных для здоровья и жизни людей и ликвидации радиационных аварий.
Широкий спектр технологических операций при ликвидации радиационных аварий требует применения мобильных робототехнических комплексов различных классов и типов, в том числе и совместное использование не менее двух комплексов, полностью автономных по энергетике, транспортируемости, оснащенности навесным и дополнительным оборудованием, жизнеобеспечению экипажей. В частности, успешное использование МРК-25 на объекте «Арзамас-16» подтвердило необходимость создания роботов легкого и сверхлегкого типов.
Возможность аварий и катастроф на предприятиях с вредным производством (химическим и др.) вызывает потребность в других классах и типах МРК. Полученный опыт по использованию МРК позволил определить ряд требований к базовым образцам и технологии их применения, а именно, базовый МРК должен иметь:
· широкий набор сменного технологического оборудования и специальных приспособлений и измерительного инструмента;
· набор бортовых радиационно-стойких телекамер и блоков управления роботами с возможностью управления несколькими МРК с одного пульта;
· набор дистанционно управляемых выносных телекамер и мониторов к ним для расширения видеоинформации о месте и процессе работы;
· при использовании МРК обязательным элементом технологической подготовки является их дополнительная адаптация к внешним условиям;
· каждую операцию, выполняемую с помощью МРК, необходимо отрабатывать в условиях, близких к реальным.
|
из
5.00
|
Обсуждение в статье: Робототехнические средства |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы