 |
Главная |


Принцип действия РВ малых высот
|
из
5.00
|
В состав частотного РВ (рис.35) входят следующие основные функциональные элементы: передатчик Прд; приемник Прм; передающая и приемная антенны А1 и А2; частотомер Ч; указатель высоты УВ и сигнализатор высоты СВ. Передатчик состоит из генератора низкой частоты ГНЧ, частотного модулятора ЧМ и генератора высокой частоты ГВЧ. В состав приемника входят балансный детектор БД и усилитель разностной частоты УРЧ. Частотомер образуется усилителем-ограничителем УО, счетчиком импульсов СИ и усилителем постоянного тока УПТ.
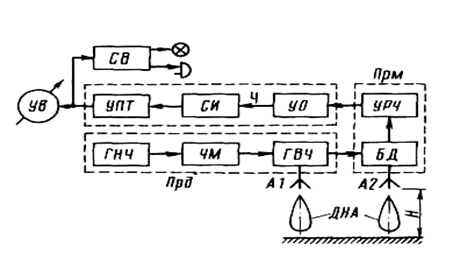 |
Рис.35 . Структурная схема частотного РВ
Принцип измерения высоты
Передатчик РВ вырабатывает частотно-модулированные ВЧ колебания, которые с помощью антенны А1 излучаются к земной поверхности преимущественно в вертикальном направлении. Достигается это за счет использования ДНА факельного типа, максимум которой ориентирован по вертикали. Отраженные от земной поверхности сигналы принимаются антенной А2, которая точно такая же, как и А1.
Частота излучаемых колебаний fизл периодически изменяется во времени по симметричному линейно ломаному закону (рис.36а) относительно средней частоты fср Максимальное отклонение частоты ∆f от среднего значения называется девиацией частоты. Длительность одного цикла изменения частоты, т. е. период модуляции Тм задается ГНЧ, который вырабатывает колебания низкой частоты Fм = 1/Тм.
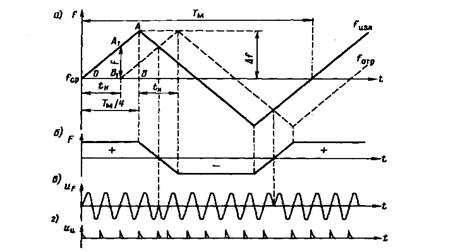
Рис.36. Временные процессы в частотном радиовысотомере
Отраженные от земной поверхности сигналы запаздывают по времени на величину th. Поскольку в процессе распространении сигналов в пространстве и их отражения частота не изменяется, закон изменения частоты отраженных сигналов fотр будет таким же, как и частоты излучаемых колебаний, но сдвинутым во времени в сторону запаздывания (вправо по временной оси) на величину th (рис.36а) Сравнение законов изменения частот fизл и fотр показывает, что в любой момент времени эти частоты отличаются на одинаковую величину F, называемую разностной частотой.
Разностную частоту F можно определить путем сравнения ∆ОАВ и ∆ОА  В , которые подобны и поэтому А В / ОВ = АВ / ОВ. Отсюда
В , которые подобны и поэтому А В / ОВ = АВ / ОВ. Отсюда
F = А1 В1 = 4Δf·tн / Tм = 8Δf·H/ с·Tм (1).
Из формулы следует, что разностная частота прямо пропорциональна высоте полета (так как ∆f и Тм — постоянные величины) и, значит, путем измерения F может быть определена высота полета.
Отраженные сигналы вместе с излучаемыми сигналами поступают на вход приемника, где они суммируются. В результате сложения колебаний разных частот образуются биения, которые сопровождаются амплитудной модуляцией с разностной частотой. После детектирования биений на выходе БД выделяются колебания разностной частоты.
Строго говоря, разностная частота не постоянна во времени (рис.36б). В те интервалы времени, когда нарушается параллельность зависимостей fизл и
f отр (t), разностная частота изменяется во времени. Суммарное время, в течение которого F зависит от времени, составляет 2 th за период модуляции Тм. Для того чтобы участки изменяющейся разностной частоты не сказывались на работе РВ, должно выполняться условие thmax < Тм, где thmax - максимальное время запаздывания на максимальной измеряемой высоте.
Частота F, равная разности fизл и fотр, может быть больше или меньше нуля в зависимости от того, какая из частот fизл или fотр больше в рассматриваемый интервал времени. Физически изменение знака разностной частоты означает изменение фазы колебаний на 180° в моменты времени, когда F достигает нулевого значения. Вследствие этого колебания разностной частоты на выходе БД представляют, квазисинусоидальные колебания с периодически (2 раза за интервал Тм) изменяющейся фазой на 180 (рис.36в). Для измерения частоты таких колебаний применяются специальные способы.
Колебания разностной частоты после усиления в УРЧ поступают на частотомер. В нем они с помощью УО превращаются в колебания импульсной формы (рис36г). Импульсы возникают в моменты прохождения UF через нуль в процессе увеличения напряжения. В каждом периоде UF появляется один импульс, а число импульсов за одну секунду N будет равно F. Таким образом, измерение разностной частоты может быть сведено к подсчету числа импульсов. Импульсы подсчитываются СИ, на выходе которого вырабатывается постоянное напряжение U, пропорциональное числу импульсов N1, а значит, и высоте полета. Это напряжение усиливается в УПТ и поступает на УВ - стрелочный прибор постоянного тока, шкала которого проградуирована в метрах. Кроме того, напряжение, пропорциональное высоте, поступает на СВ, где сравнивается с установленным опорным напряжением, соответствующим опасной высоте. В момент наступления равенства этих напряжений срабатывает звуковая и световая сигнализация, показывая, что ВС достигла установленной высоты.
Методическая погрешность и минимальная измеряемая высота.
Из выражения (1) можно определить высоту:
Н = с Тм·F/ 8Δf = c·Tм·N1/ 8Δf = c·N/ 8Δf (2),
где N = Tм ·N1 - число импульсов за период модуляции.
Выражение (2) показывает, что измеряемая высота прямо пропорциональна количеству импульсов за период модуляции. При изменении высоты меняется число импульсов N. Минимальное приращение числа импульсов ∆Nmin = 1, поскольку дробной части импульса быть не может. Это значит, что минимальное изменение высоты ∆Н, которое может быть зарегистрировано РВ, составляет
H=c/8Δf .
Таким образом, при плавном изменении высоты, РВ должен давать дискретные значения высоты, следующие друг за другом через величину ∆Н, это приводит к появлению дополнительной погрешности измерения высоты ∆Н, которая определяется методом измерения и называется, поэтому методической. По указанной причине РВ не измеряет высоту на высотах, меньших ∆Н, т. е. пока в каждом периоде модуляции на выходе УО не сформируется хотя бы один импульс. Поэтому минимальная измеряемая высота будет равна
Hmin = ΔH = c/8Δf .
Как показывают формулы, методическая погрешность и минимальная измеряемая высота частотных РВ обратно пропорциональны девиации частоты и для их уменьшения девиация частоты должна повышаться.
Особенности работы РВ над сложными отражающими поверхностями.
Чаще всего РВ работают не над ровной, зеркально отражающей поверхностью, а над поверхностью неровной и состоящей из нескольких различных слоев. Действительно, поверхность создает зеркальное отражение в направлении нормали к ней, если высота ее неровностей не превышает 0,1 длины волны. Для РВ сантиметрового диапазона зеркально отражающей поверхностью можно считать такую поверхность, высота неровностей которой 5...7 мм.
Работа РВ над многослойной отражающей поверхностью.
Если РВ располагается над земной поверхностью, состоящей из нескольких слоев с различными физическими свойствами (рис.37), то измеренное значение высоты НИ может отличаться от высоты Н1 до границы раздела первых двух физических сред. Примерами таких ситуаций может быть работа РВ над водной поверхностью, льдом, снегом, над поверхностью, покрытой растительностью, и др. Работа РВ над многослойной отражающей поверхностью происходит следующим образом.
Излучаемый РВ сигнал доходит до границы раздела физических сред 1 и 2 и частично отражается от нее. Отраженный от этой границы сигнал с амплитудой Em1 принимается РВ. Часть излучаемого сигнала проходит в физическую среду 2 и распространяется в ней до границы раздела сред 2 и 3. Дошедший до этой границы сигнал частично отражается от нее и
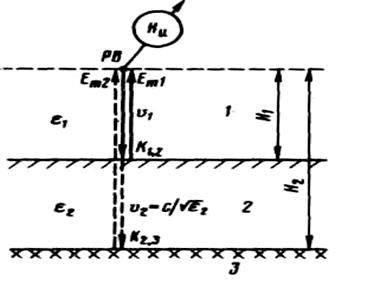
Рис.37. Работа РВ над многослойной отражающей поверхностью
возвращается к РВ, имея амплитуду Еm2. Таким образом, если ограничиться рассмотрением только трех слоев, то к РВ поступают два сигнала, прошедшие в пространстве различные высоты. Поэтому измеряемая высота будет зависеть от соотношения амплитуд Еm1 и Еm2. Так если Еm1 >Еm2, то вторым отраженным сигналом можно пренебречь и РВ должен измерять высоту H1 т. е. Ни1=Н1. Если же Еm1 < Еm2, то РВ должен показывать значения Ни2 > Н2, поскольку скорость распространения радиоволны в физической среде 2 меньше, чем в вакууме. Если амплитуды Еm1 и Еm2 сравнимы, то РВ должен показывать значения, лежащие между величинами Ни1 и Ни2 . Соотношение между амплитудами Еm1 и Еm2 определяется электрическими свойствами физических сред, а именно диэлектрической проницаемостью ε и коэффициентом затухания α. Коэффициент отражения (отношение амплитуд отраженной и падающей волн) от границы раздела двух физических сред и скорость распространения радиоволны V определяются соотношениями:
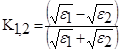 ;
;
(3)
V  .
.
Используя формулы (3), а также коэффициент затухания, можно определить соотношение амплитуд Еm 1 и Em2 и измеряемую РВ высоту. Рассмотрим несколько характерных случаев.
Работа РВ над водной поверхностью. К = 0,8, так как ε1 = 1 (воздух),ε2 =80 (вода), и поэтому Em1>Em2. РВ измеряет высоту над водной поверхностью Н1,а вследствие большого коэффициента отражения обеспечивает над водной поверхностью наибольшую высотность.
Работа РВ над поверхностью покрытой льдом. Здесь надо различать два случая: пресный и соленый лед. При работе над соленым льдом К1,2 ≈ 0,4, так как для соленого льда ε2≈5,3. Это значит, что большая часть сигнала проходит в лед и в нем распространяется. Соленый лед вносит очень большое затухание 100. . .150 дБ/м на частоте 10 ГГц. Если, например, принять α = 100 дБ/м, то при прохождении радиоволной каждого метра в соленом льду ее амплитуда уменьшается в 105 раз. Это значит, что отраженный от второй границы раздела сигнал будет иметь амплитуду, гораздо меньшую, чем сигнал, отраженный от поверхности льда. Следовательно, РВ будет измерять высоту до поверхности соленого льда.
При работе над пресным (материковым) льдом Kl,,2 ≈ 0,28, так как для пресного льда ε = 3,2, т.е. амплитуда отраженного от пресного льда сигнала много меньше амплитуды падающей радиоволны. В отличие от соленого льда пресный не вносит большого затухания. Для него а - 0,01 дБ/м на частоте 100 МГц и а = 1,5 дБ/м на частоте 10 ГГц. По этой причине сигнал, распространяющийся в пресном льду и отраженный от нижней границы льда, может иметь амплитуду, большую или сравнимую с амплитудой сигнала, отраженного от поверхности льда. РВ в таких условиях будет измерять высоту, большую, чем до поверхности льда, и РВ пользоваться нельзя, так как он не обеспечивает безопасности полетов. Впервые на это явление обратили внимание при полетах в Антарктике.
Работа РВ над поверхностью, покрытой снегом. Диэлектрическая проницаемость снега лежит между значениями е для воздуха и льда, поэтому коэффициент отражения от снега еще меньше, чем ото льда, и почти вся энергия радиоволны проходит через снег и отражается от земной поверхности. Вследствие этого РВ показывает высоту до земной поверхности. Если толщина снежного покрова значительна, то из-за затухания радиоволны в снеге может уменьшиться высотность РВ.
Работа РВ над поверхностью, покрытой растительностью. Показания РВ зависят от "характера леса и времени года. Над густым лиственным лесом показания РВ соответствуют высоте над кроной деревьев. Над редким лесом РВ показывает высоту до земной поверхности. В общем случае РВ может давать показания, лежащие между значениями высоты до земной поверхности и вершин деревьев.
Работа РВ над неровной и шероховатой поверхностью. При работе РВ над неровной поверхностью появляются дополнительные погрешности измерения высоты, связанные с приходом отраженных сигналов с различных направлений (а не только с направления вертикали) и проявлением эффекта Доплера. Неровная поверхность отражает сигналы во всех направлениях и поэтому вследствие конечной ширины ДНА (рис.38,а) сигналы к РВ будут поступать со всех направлений, лежащих в пределах ширины ДНА. Каждому наклонному направлению распространения радиоволн соответствует свое время запаздывания и своя разностная частота.
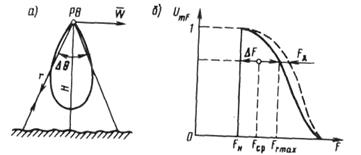
Рис. 38. Работа РВ над неровной поверхностью
Это значит, что на выходе приемника выделяется сигнал биений сложной формы, в составе которого присутствуют колебания всех частот от Fн до Frmax, где Fн - разностная частота, соответствующая высоте Н; Frmax- разностная частота, соответствующая максимальному наклонному расстоянию до земной поверхности (рис. 38,б). Появление в спектре биений частот, отличных от Fn, приводит к погрешностям измерения высоты. Частотомер РВ измеряет среднюю частоту спектра биений Fcp, которая отличается от частоты FH. Смещение частоты Fcp, примерно равное 0,5 ∆F (∆F - ширина спектра биений), вызывает Дополнительную погрешность измерения высоты, которая называется погрешностью смещения.
ΔH ≈ 0,5 ΔF·H / Fн
|
из
5.00
|
Обсуждение в статье: Принцип действия РВ малых высот |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы